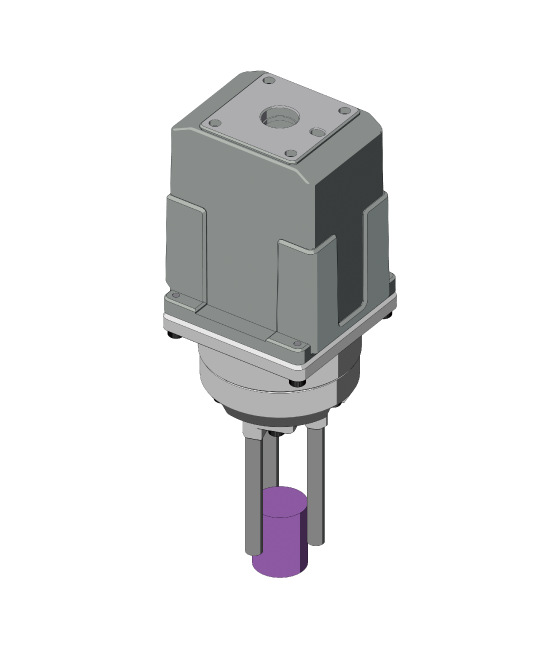
電動グリッパ
EHシリーズ
- デリケートなつかみを実現
- クローズトループステッピングモーター搭載
- 2つ爪/3つ爪タイプを用意
- 最大把持力50N
特徴 | 電動グリッパ EHシリーズ αSTEP AZシリーズ搭載
主な特徴
多種多様なワークに、「デリケートなつかみ」でアプローチ
運転電流を1%単位で設定できるため、把持力の繊細な調整が可能です。
つかむ
傷つきやすく、変形しやすいワークの把持が可能。
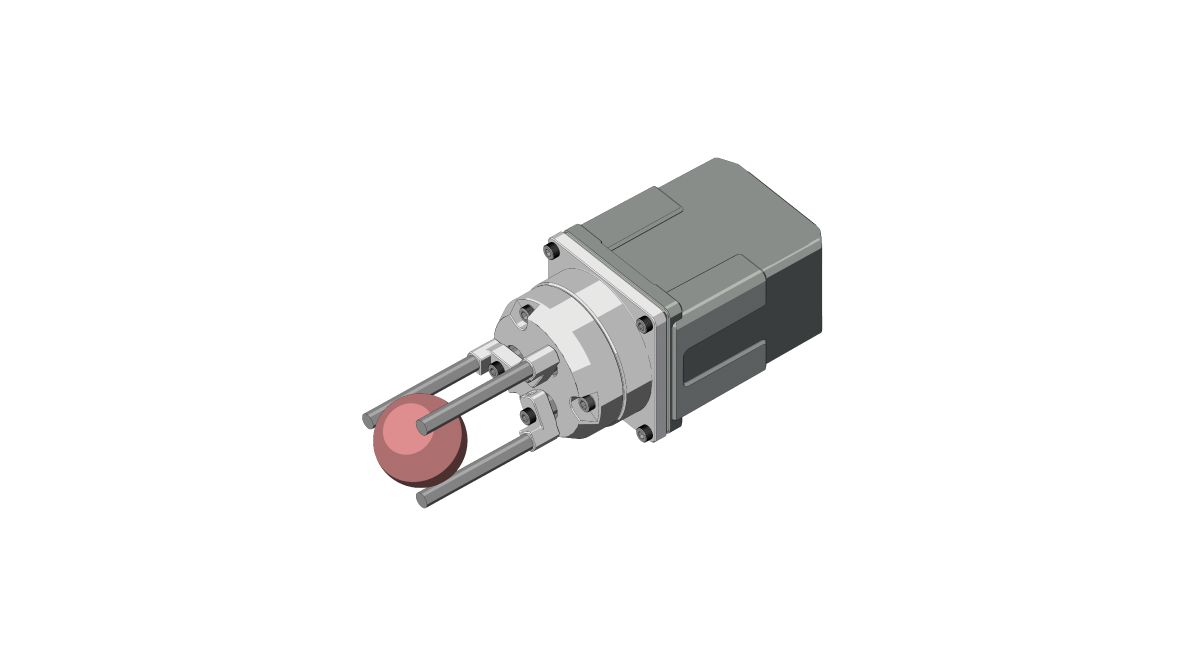
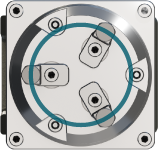
3つ爪タイプは、球体、円筒形や変形しやすいワークの把持に最適。
そろえる
ワークの向きそろえ、位置そろえが可能。
測定する
ワークの大きさ判定、大きさ測定が可能。
繊細な動作ほど、空気圧グリッパよりもEHシリーズがおすすめ
1%単位で把持力調整(2つ爪・3つ爪)
空気圧グリッパでのレギュレータ(減圧弁)調整が不要。デジタル設定で、簡単・微細に把持力を調整できます。
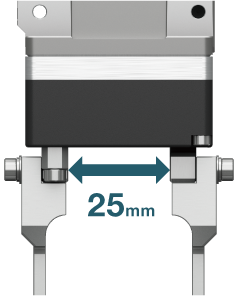
0.02mm/s単位で速度調整(2つ爪)
空気圧グリッパでのスピードコントローラ(速度制御弁)調整が不要。
0.02mm単位で移動量調整(2つ爪)
ステッピングモーターの位置決め精度の高さを活かしたグリッパです。
ABZOセンサで位置モニタ(2つ爪・3つ爪)
詳細な位置情報をモニタできます。2つ爪タイプでは、位置情報をワークの大きさ判定にも活用できます。
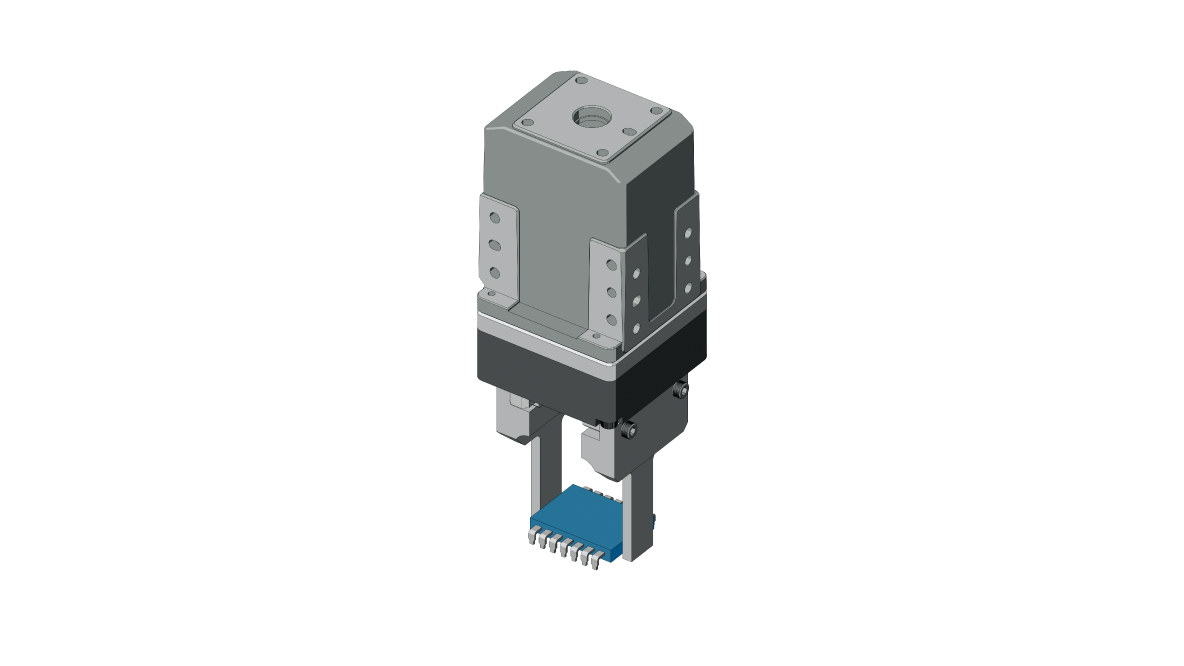
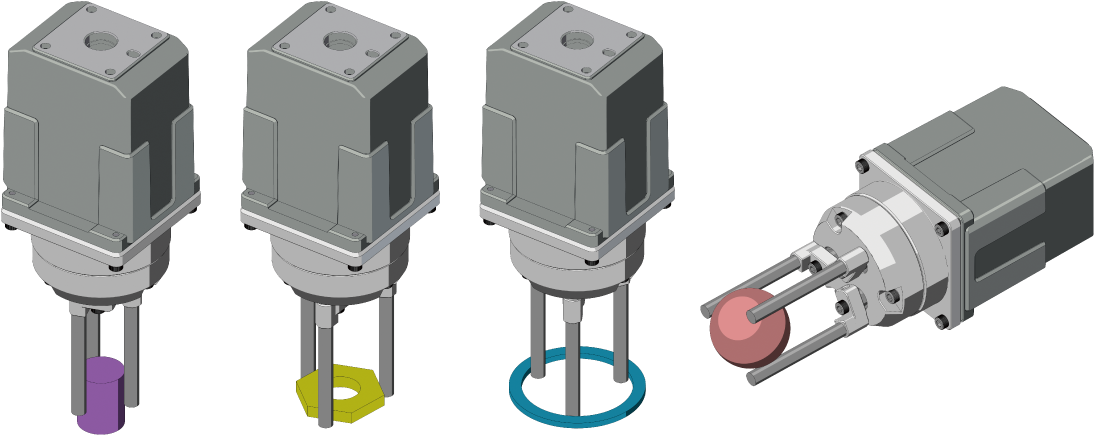
用途に合わせて使い分け 2つ爪タイプと3つ爪タイプ
2つ爪タイプと3つ爪タイプの比較
| タイプ | 2つ爪※1 | 3つ爪 | ||
|---|---|---|---|---|
| 把持に適したワーク形状 |
|
| ||
| 可動範囲 |
 |
 |
 |
|
| 開時: P.C.D.Φ30.9mm |
閉時: P.C.D.Φ7mm |
|||
 |
 |
|||
| 開き幅: P.C.D.Φ23.9mm |
||||
| 最大把持力[N] | 25 | 50 | ||
| 許容荷重[N] (許容アキシアル荷重[N]※2) |
5 | 15 | ||
| 質量[kg] | 0.38 | 0.38(取付カバー付) 0.28(取付カバーなし) |
||
- ※1
- 仕様は型番4の値です。
- ※2
- 3つ爪タイプの場合です。
3つ爪タイプの特徴
- 許容アキシアル荷重が大きいため、ワークの質量が大きい用途に適しています。
- 各爪が回転しながら開閉します。
AZシリーズ搭載のメリット
バッテリレスのアブソリュートセンサを搭載
小型のバッテリレスの機械式アブソリュートセンサ(ABZOセンサ)を搭載しています。生産性の向上やコスト削減に貢献します。
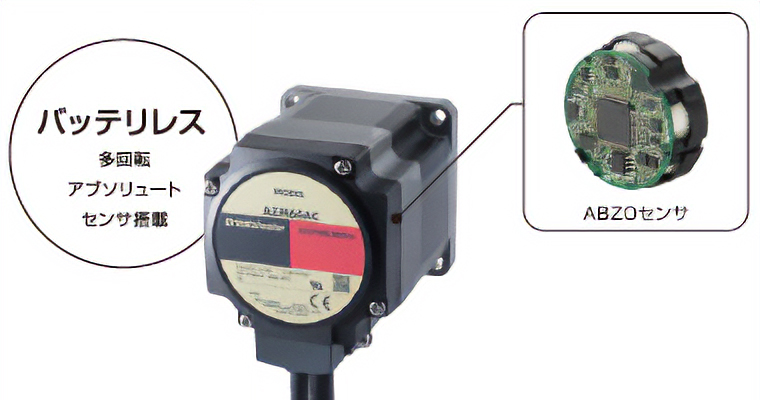
- 機械式センサ
非通電時も位置情報を保持 - 多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転(1800回転分)の絶対位置が検出可能
外部センサ不要
アブソリュートシステムなので、原点センサ、リミットセンサは不要です。
メリット
- 高速原点復帰+原点復帰精度の向上
- コストダウン
- 省配線
- 外部センサ誤動作の影響を受けない
バッテリレス
機械式センサはバッテリが不要です。
位置情報はABZOセンサで機械的に管理されています。
メリット
- バッテリの交換が不要
- 自由なドライバの設置
- 海外輸送も安心
シーケンス機能によりメインプログラムを簡略化
AZシリーズは、連結運転や運転間のタイマ設定、条件分岐、ループ運転などの豊富なシーケンス機能を搭載しています。(一部機種を除く)
サポートソフトMEXE02を使って設定することができ、上位システムのシーケンスプログラムを簡略化できます。
- 位置決め運転データ設定値(最大256点)
- 汎用入出力点数(入力10点、出力6点)
- 通信用入出力点数(入力16点、出力16点)
AZシリーズを搭載したラインアップ
搭載モーターが同じため、駆動方法やメンテナンス方法が共通です。
電動アクチュエータ(AZシリーズ搭載)
| 電動スライダ | 電動シリンダ | コンパクト電動シリンダ | ラック・ピニオンシステム | 電動グリッパ | 中空ロータリーアクチュエータ |
|---|---|---|---|---|---|
| EASシリーズ EZSシリーズ EZSHシリーズ |
EACシリーズ | DRシリーズ DRS2シリーズ |
Lシリーズ LJリニアヘッド AZシリーズ組み合わせ※ |
EHシリーズ | DGⅡシリーズ |
- 搭載モーターの電源入力はシリーズで異なります。詳細ラインアップは各シリーズのページでご確認ください。
- ※ LJリニアヘッドはAZシリーズを別途購入し、組み付けて使用します。
ドライバの特徴と種類
上位システムに合わせて選べるドライバ
さまざまな制御・システム・インターフェイスに対応可能なラインアップを用意しています。
| ドライバタイプ | 対応インターフェイス | 単軸ドライバ | |
|---|---|---|---|
| DC電源入力 | |||
 |
|||
| ネットワーク対応 | FAネットワークを通じて、上位制御機 器からドライバを直接制御 |
EtherCAT | ○ |
| EtherNet/IP™ | ○ | ||
| PROFINET | ○ | ||
| MECHATROLINK-Ⅲ | - | ||
| SSCNETⅢ/H | - | ||
| 位置決め機能内蔵 | 運転データをドライバに内蔵。Modbus (RTU)とI/Oで制御可能。ネットワーク コンバータを使うことでCC-Link制御が 可能。 |
Modbus(RTU) I/O CC-Link※ |
○ |
| RS-485通信付きパルス列入力 | パルス信号で制御。モーターのステー タス情報をModbus(RTU)でモニタ可 能。 |
パルス列 Modbus(RTU) |
○ |
| パルス列入力 | パルス信号で制御 | パルス列 | ○ |
- ※ 別売のネットワークコンバータ使用時に対応可能です。
- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ EtherNet/IP™はODVAの商標です。
- ※ PROFINETは、PROFIBUS Nutzerorganisation e.V.(PNO)の商標または登録商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ SSCNETⅢ/Hは三菱電機株式会社の登録商標です。
- ※ CC-LinkはCC-Link協会の登録商標です。
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
さまざまな機能で、立上げからメンテナンスまでを総合サポート
-
立ち上げ・評価
配線チェックやテスト運転時に役立つ機能をご用意しています。
- 運転データの設定と保存
- I/Oモニタ
- ティーチング・リモート運転
-
調整
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
- 波形モニタ
-
診断・メンテナンス
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
- アラームモニタ
- ユニット情報モニタ
- ステータスモニタ
-
運転データ/パラメータ設定画面 -
波形モニタ
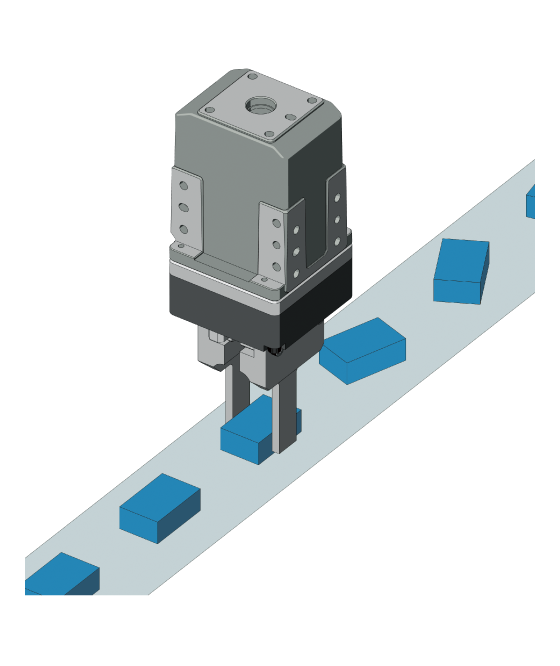
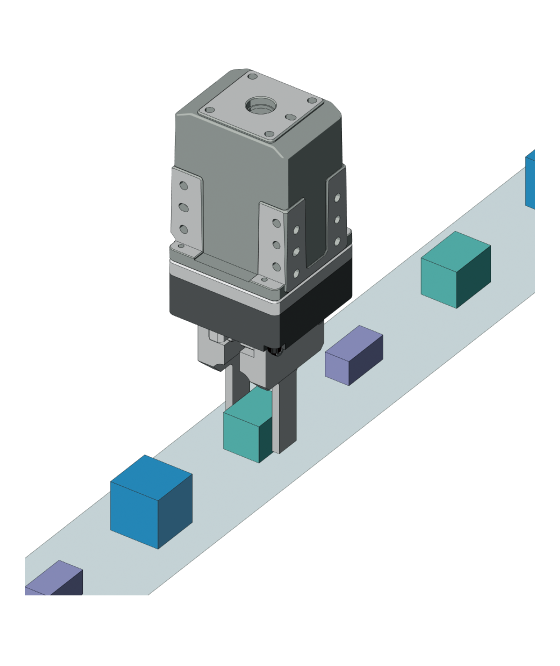
用途例
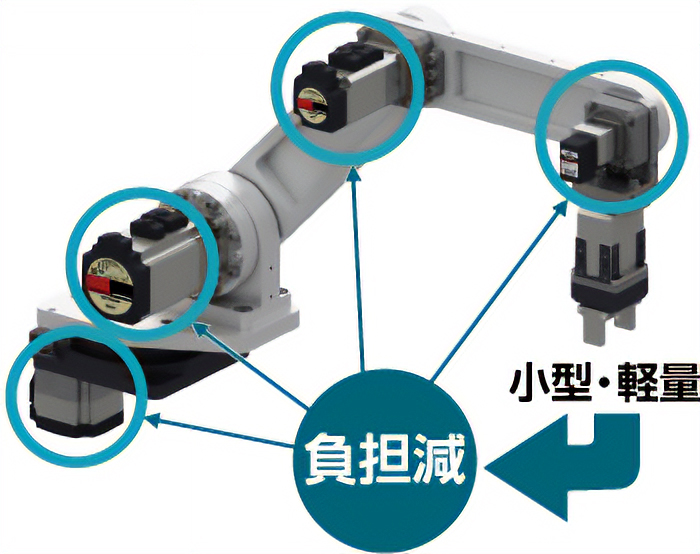
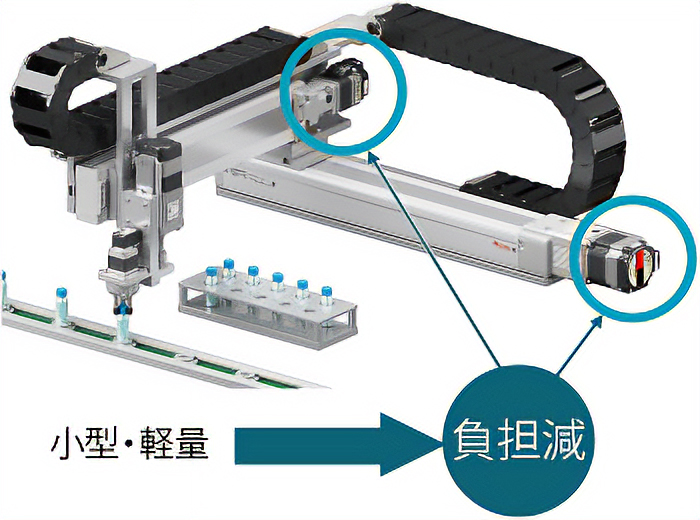
小型、軽量のEHをエンドエフェクタに使うことで、他の駆動軸の負担を減らせます。それによって、タクトタイムの短縮、小型化に貢献します。
ロボットのエンドエフェクタに使用
垂直多関節ロボットの場合
直交軸ロボットの場合
| EH3-AZAKH | EH4-AZAKH | EH4T-AZAK |
|---|---|---|
 |
 |
 |
| W42.5mm×D80.5mm×H36mm | W48.5mm×D91mm×H46mm | W47mm×D90.5mm×H46mm |
| 質量 : 200g | 質量 : 380g | 質量 : 280g |
ロボット内製事例
市販の産業用ロボットに簡単取り付け

関連製品
AZシリーズ miniドライバ DC電源入力
ボックス型のドライバより、さらに小型・軽量に設計されたminiドライバです。バッテリ電源にも対応し、今まで以上にさまざまな用途でご活用いただけます。

- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ EtherNet/IP™はODVAの商標です。
- ※ PROFINETは、PROFIBUS Nutzerorganisation e.V.(PNO)の商標または登録商標です。
- ※ Modbusは、Schneider Automation Inc. の登録商標です。
- ※ Ethernetは、富士フィルムビジネスイノベーション株式会社の登録商標です。
製品を絞り込む

