ラック・ピニオンシステム
Lシリーズ
αSTEP AZシリーズ搭載
- ラック・ピニオンとステッピングモーターを一体化した構造
- クローズドループステッピングモーター搭載
- ストローク100~1000mm
- 最大可搬質量100Kg
特徴 | ラック・ピニオンシステム Lシリーズ αSTEP AZシリーズ搭載
主な特徴
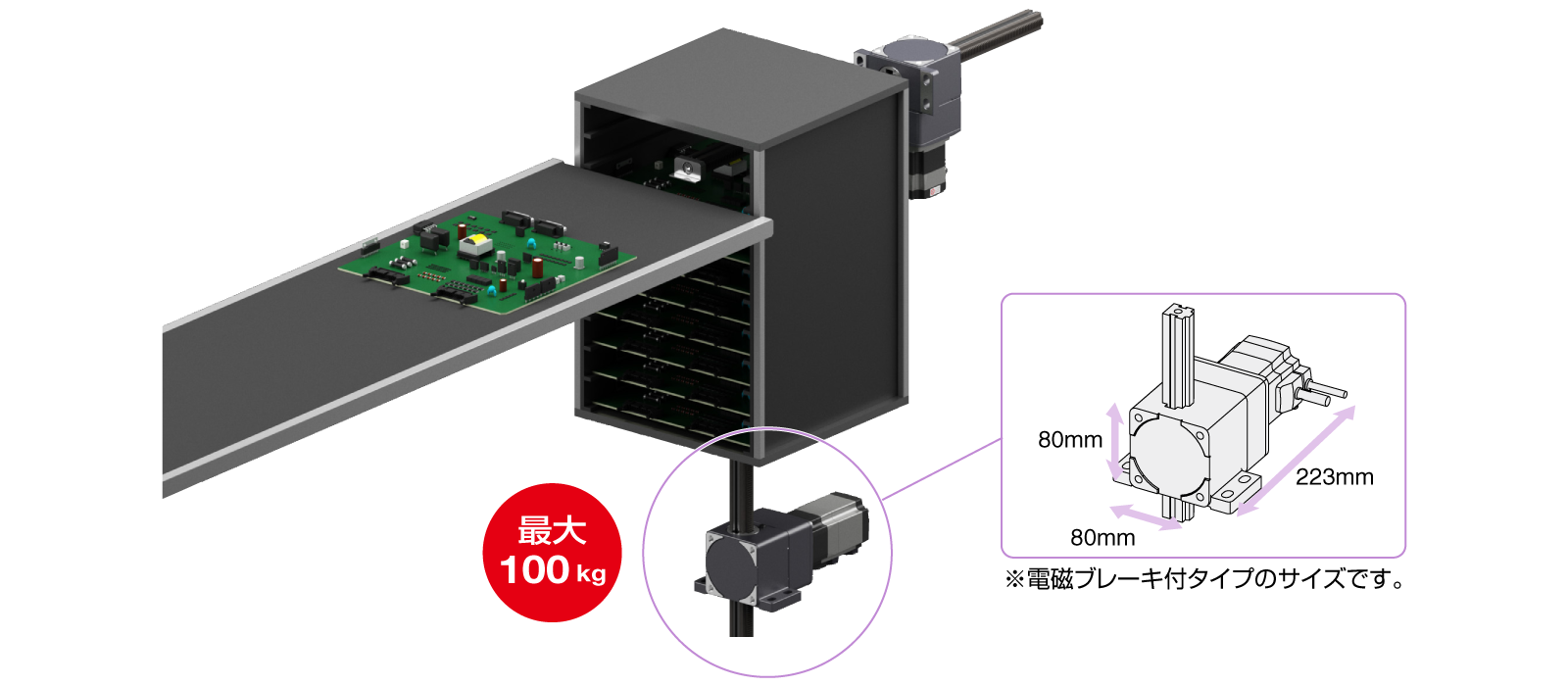
コンパクトサイズで最大可搬質量100kgを実現
最大可搬質量100kg
ピニオンの大径化に伴い、歯車強度がアップしたことで最大可搬質量100kgを実現
最長ストローク1000mm
100~1000mmのストロークをラインアップ
電動スライダとの比較
ラック・ピニオンシステムは、モーメントを考慮しない取り付けであれば、可搬質量分をそのまま搬送できます。
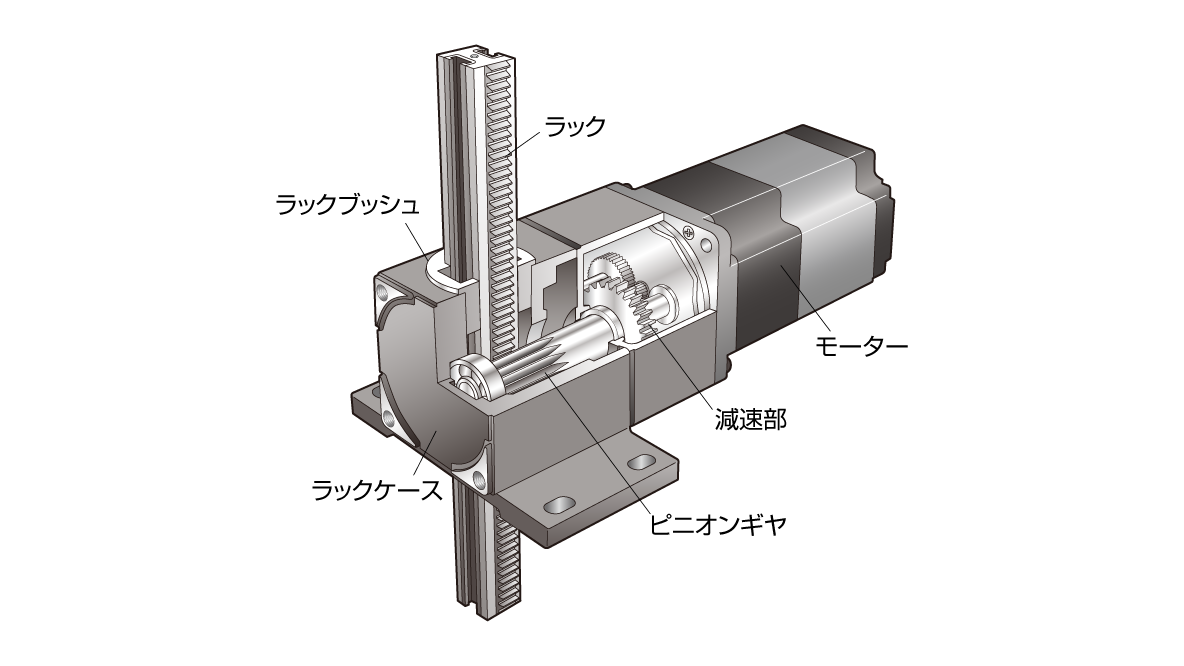
ラック・ピニオンシステムの概要
ラック・ピニオンシステムは、モーターの回転運動を直線運動に簡単に変換できます。
直線機構部はコンパクトな設計ながら、高強度加工を施していることにより、大きな負荷を搬送することができます。
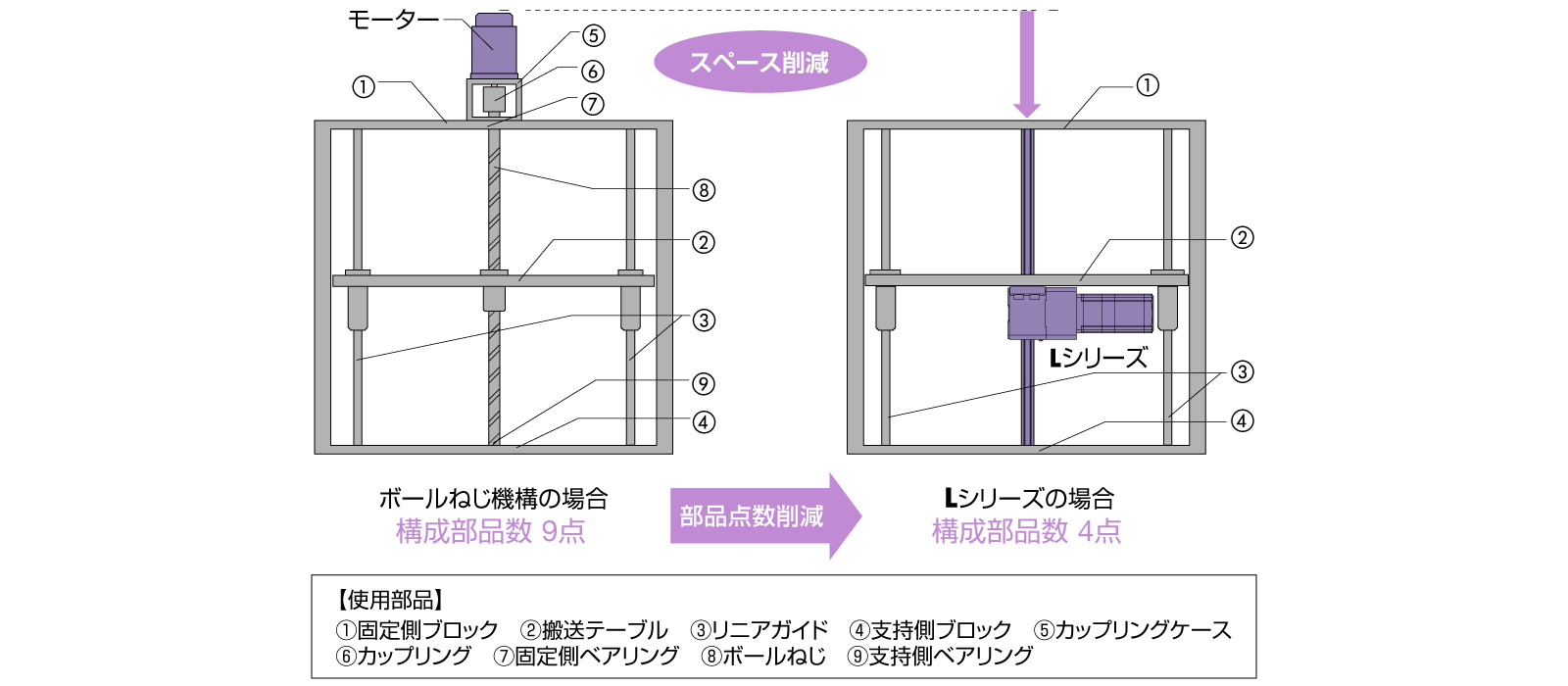
設計の効率化に貢献
装置立ち上げまでの時間を短縮
ラック・ピニオンシステムは、従来ご使用いただいている部品を削減したり、設計・組み立てにかかる工数を大幅に減らすことができます。
省スペース化
ラック両端のねじ穴を固定して本体部を自走できます。モータースペースが確保できないような大きさの装置に効果的です。
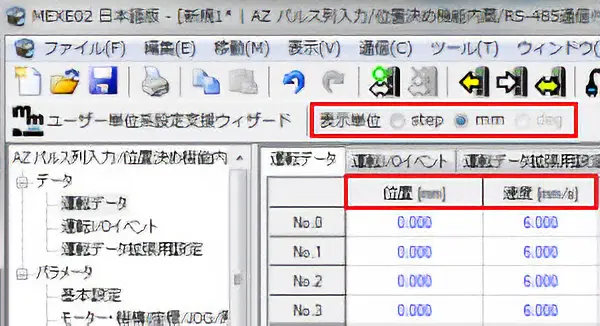
mm単位での設定が可能
駆動モーターに αSTEP AZシリーズを採用。
サポートソフト MEXE02を一緒に使用することで、簡単にmm単位で移動量を設定でき、さまざまな直線動作の用途を実現できます。
最小移動量
| 高速タイプ | 高可搬質量タイプ |
|---|---|
| 0.01mm | 0.001mm |
使用速度範囲(AC電源入力タイプの場合)
| 高速タイプ | 高可搬質量タイプ | |
|---|---|---|
| 取付角寸法60mm | 取付角寸法80mm | |
| 0 ~ 500mm/s | 0 ~ 90mm/s | 0 ~ 40mm/s |
用途例
さまざまな用途に応用できるラック・ピニオンシステムは、部品感覚でお選びいただける、使い勝手の良い製品です。
| ラック移動方向 | モーターを固定 | ラック固定 |
|---|---|---|
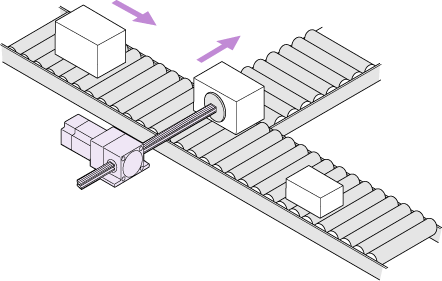
平行(Bタイプ)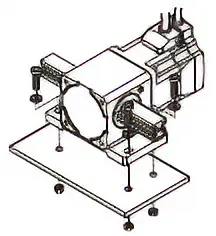 |
押したり、引いたりして物を運ぶ動きを簡単におこなうことができます。 |
ストローク、スピードもバリエーション豊富に取りそろえています。 |
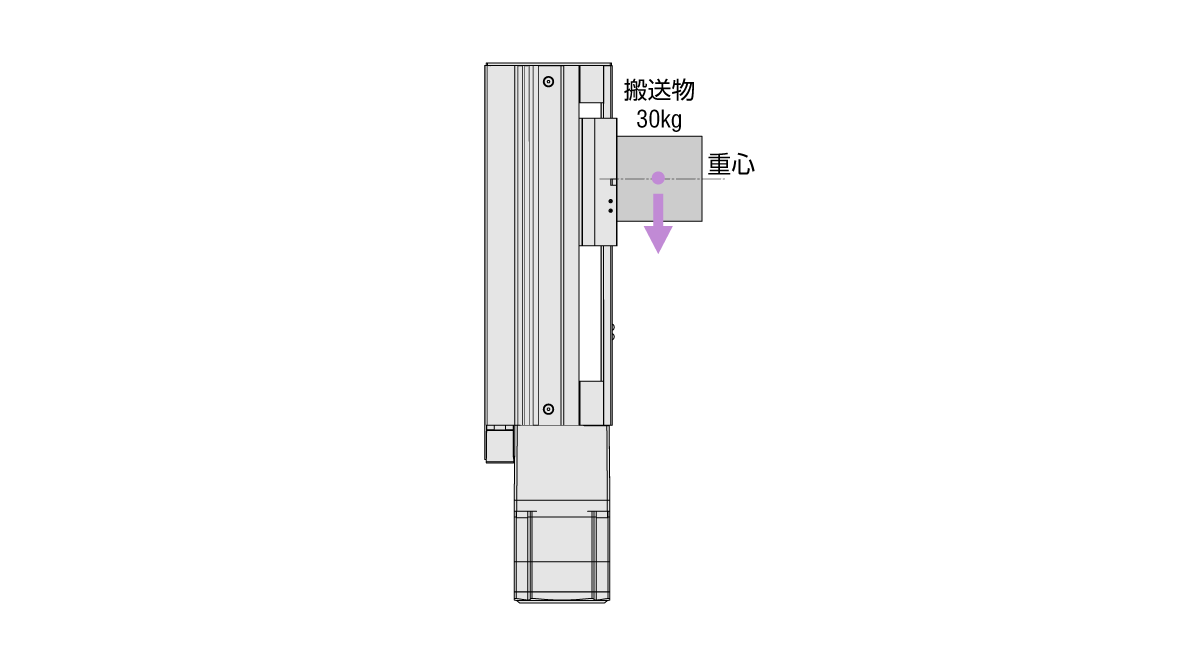
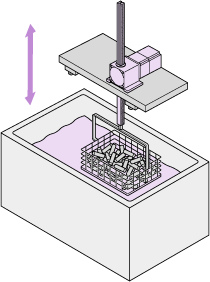
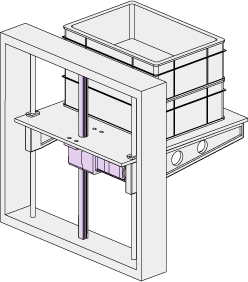
垂直(Fタイプ)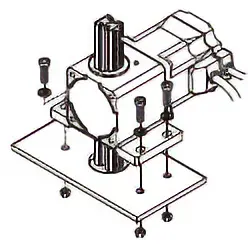 |
上下駆動も簡単です。落下対策として電磁ブレーキ付もご用意しています。 |
ラック先端のねじ穴を利用すれば負荷の締結やラックの固定が簡単です。 |

当社生産設備の実例からワーク昇降装置を取り上げ、製品の採用ポイントを解説します。
オリエンタルモーターの豊富な製品ラインアップと幅広いサービスにより、目的に合ったスペックの装置設計や立ち上げ期間の短縮といったトータルコストダウンに貢献します。
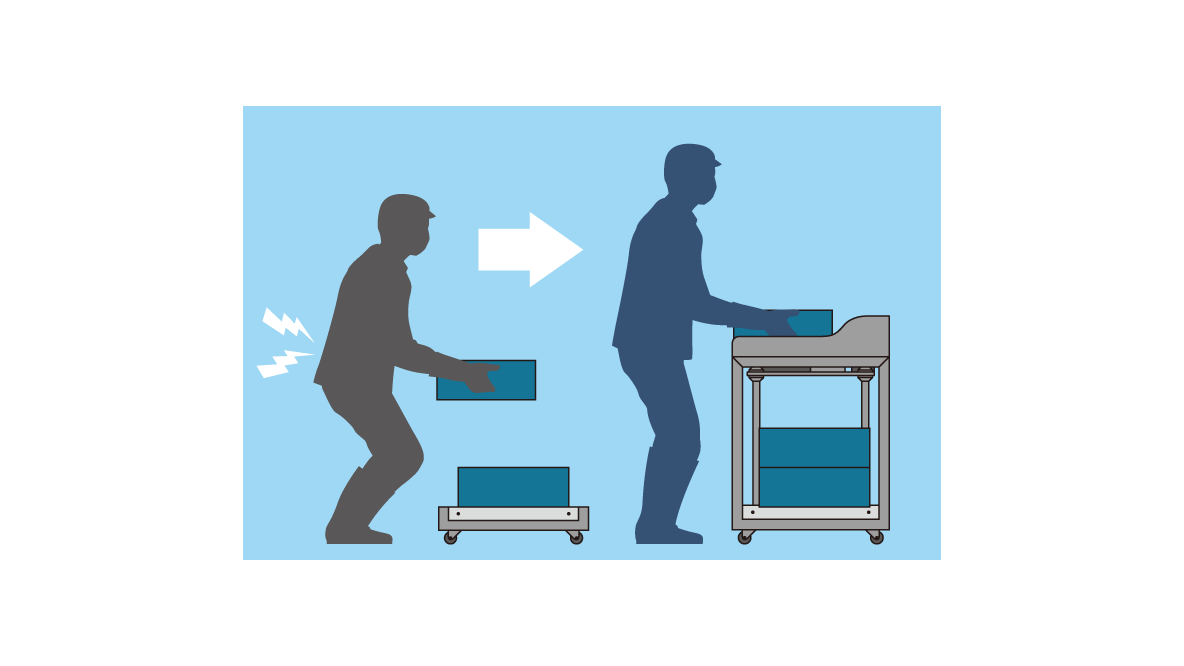
省力化のご提案
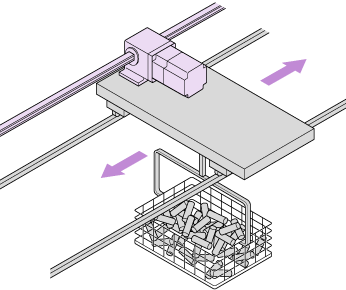
日本の製造現場では、少子高齢化・人口減少に伴う労働人口の減少による人手不足が問題となっています。その中でも「重量物を持ち上げる力仕事」や「仕分けなどの繰り返し作業」の負担を軽減する省力化が急務です。高荷重の搬送がおこなえるラック・ピニオンシステムは、生産作業の省力化に貢献します。
ラック・ピニオンシステム省力化のご提案
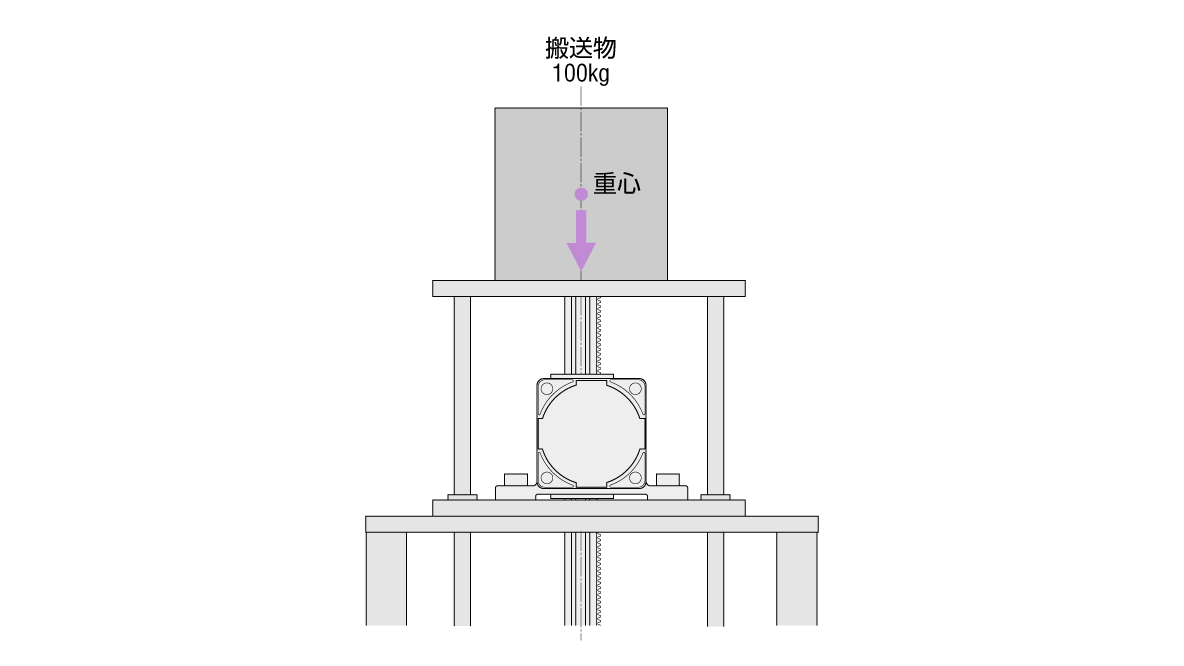
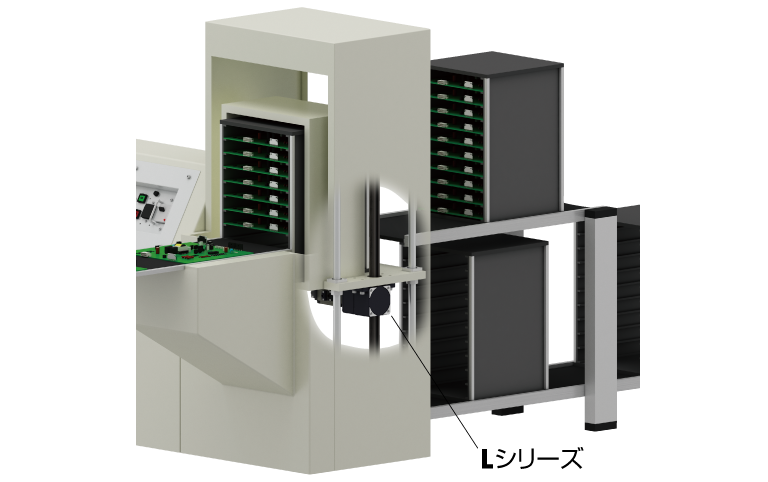
Lシリーズの使用事例(自動昇降装置デモ機)
当社では、Lシリーズを使用した自動昇降装置のデモ機(展示用)をご用意しています。シンプルな機構で、100kgまでの重量物を昇降できます。昇降装置の詳細については動画をご覧ください。
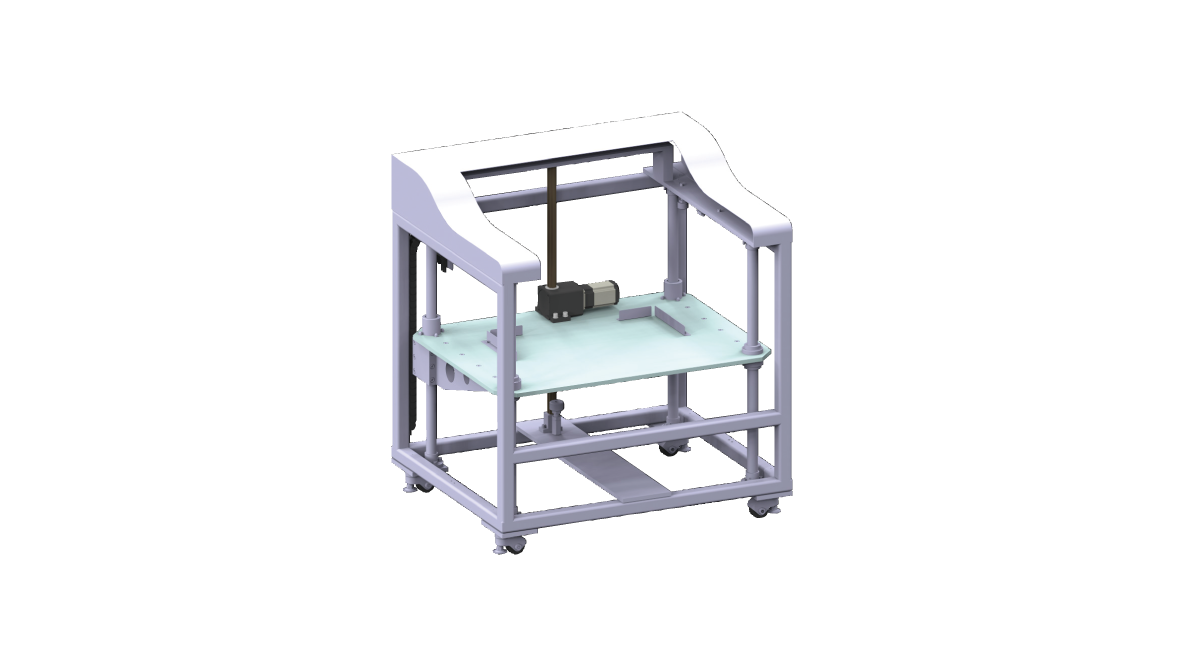
可搬質量:100kg(20mm/s時)
ストローク:600mm
ラック・ピニオンシステム Lシリーズ 活用のご提案
デモ機 構成一覧
| 品名 | 定価 | ||
|---|---|---|---|
| Lシリーズ Fタイプ |  |
LM4F40AZMC-6 | 106,500円 |
| 位置決め機能内蔵タイプドライバ | AZD-AD | 57,200円 | |
| 可動接続ケーブルセット (2m) |
 |
CC020VZRB | 11,800円 |
AZシリーズ搭載のメリット
バッテリレスのアブソリュートセンサを搭載
小型のバッテリレスの機械式アブソリュートセンサ(ABZOセンサ)を搭載しています。生産性の向上やコスト削減に貢献します。
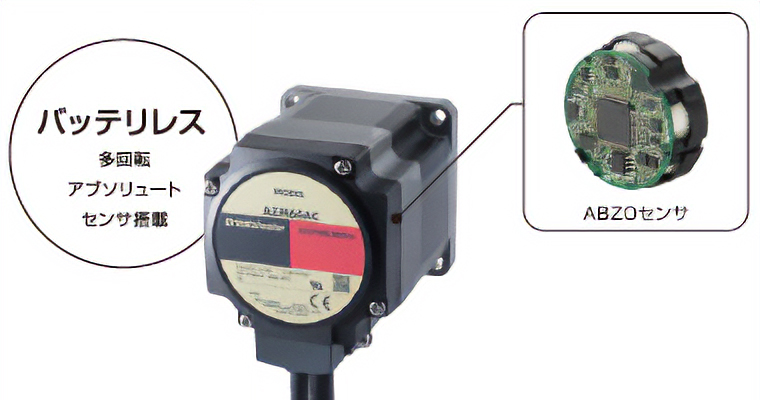
- 機械式センサ
非通電時も位置情報を保持 - 多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転(1800回転分)の絶対位置が検出可能
外部センサ不要
アブソリュートシステムなので、原点センサ、リミットセンサは不要です。
メリット
- 高速原点復帰+原点復帰精度の向上
- コストダウン
- 省配線
- 外部センサ誤動作の影響を受けない
バッテリレス
機械式センサはバッテリが不要です。
位置情報はABZOセンサで機械的に管理されています。
メリット
- バッテリの交換が不要
- 自由なドライバの設置
- 海外輸送も安心
シーケンス機能によりメインプログラムを簡略化
AZシリーズは、連結運転や運転間のタイマ設定、条件分岐、ループ運転などの豊富なシーケンス機能を搭載しています。(一部機種を除く)
サポートソフトMEXE02を使って設定することができ、上位システムのシーケンスプログラムを簡略化できます。
- 位置決め運転データ設定値(最大256点)
- 汎用入出力点数(入力10点、出力6点)
- 通信用入出力点数(入力16点、出力16点)
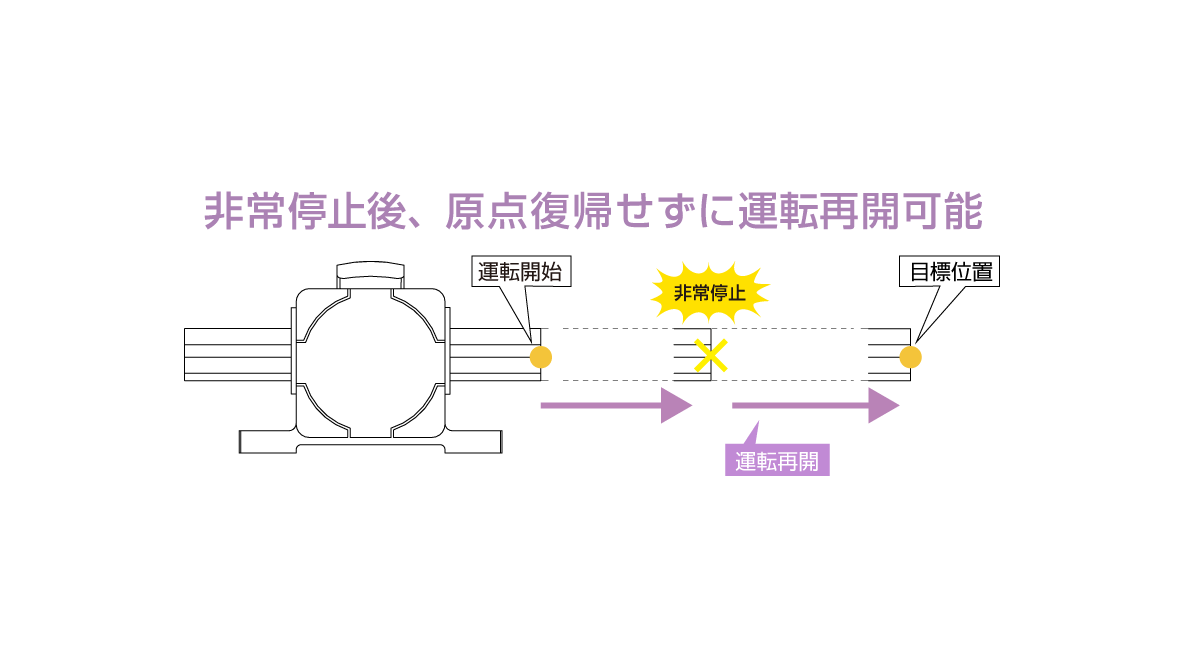
原点復帰不要(位置決め機能内蔵タイプ)
位置決め運転中に電源が遮断されても、位置情報は保存されます。位置決め機能内蔵タイプの場合、生産ラインでの非常停止時や停電時からの復旧の際、原点復帰をしなくても位置決め運転を再開できます。
モーター稼働状況のデータ収集と、予防・予知保全に役立つ機能
モーターの運転状態などを確認するための豊富なモニタ機能が搭載されています。
それぞれのシーンにあわせて使い分けることで、装置の立ち上げ・調整時間の短縮や、メンテナンス・保全に役立てることができます。
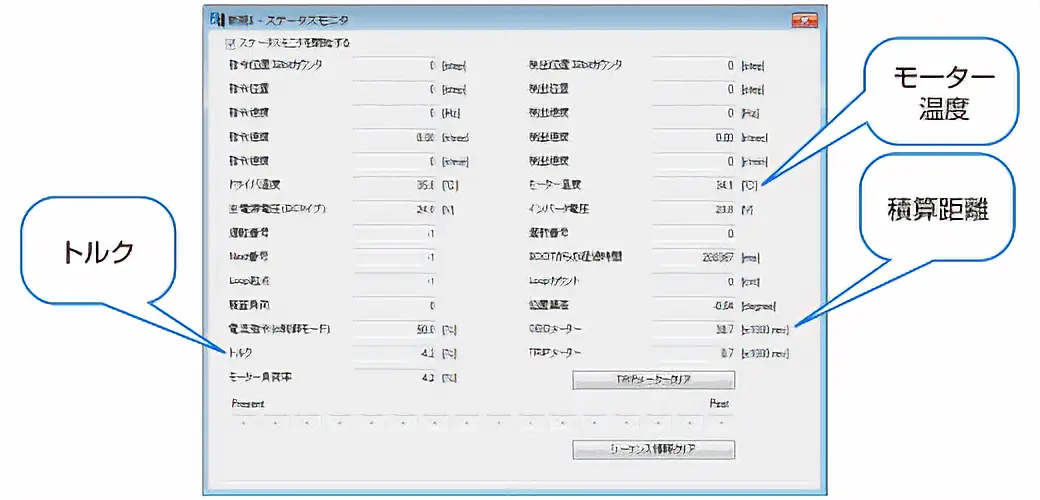
モーターの稼働状況を可視化し、データ収集に役立つモニタ機能
AZシリーズに搭載されているABZOセンサにより、モーターの稼動状況を数値でモニタリングできます。
【サポートソフト MEXE02でのモニタリングの様子】
また、位置決め機能内蔵タイプでは、FAネットワークを介して、上位マスタでのデータ収集を実現できます。
ネットワークコンバータの種類と対応しているFAネットワークについて
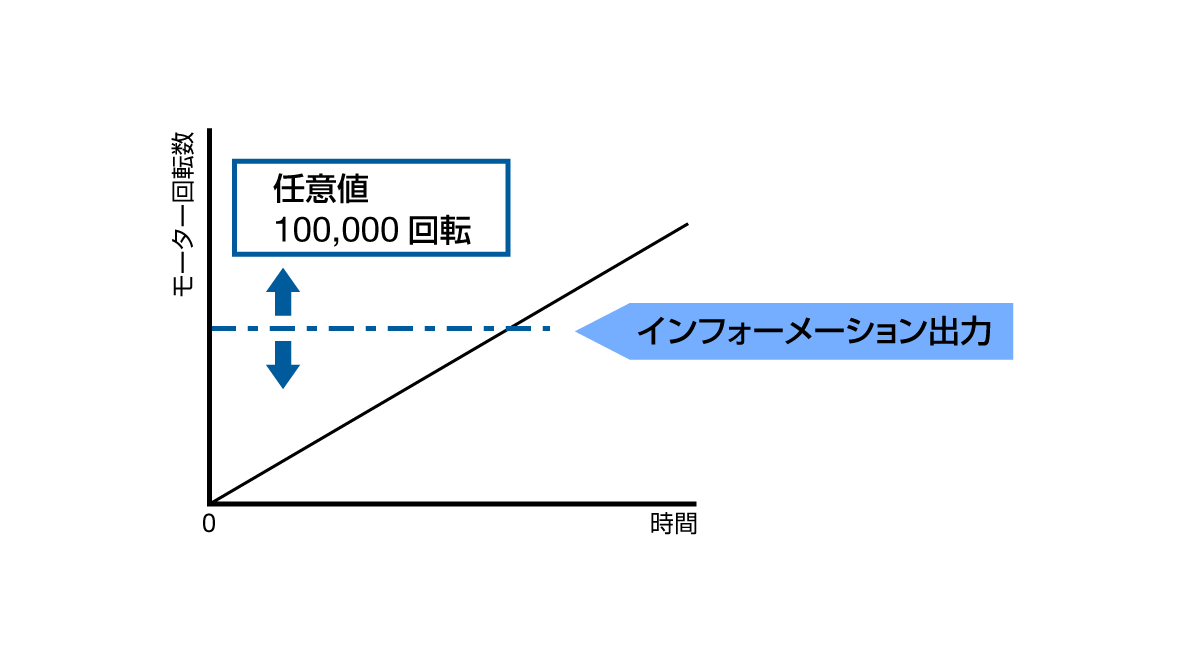
予防保全・予知保全に役立つ、インフォメーション機能
各インフォメーションのモニタ項目に任意の数値を設定すると、その数値に達したときに外部へ信号を出力させることができます。
この情報を上位にとりこむことで、トラブルの早期発見や、製品のメンテナンス時期の調節に役立てることができます。
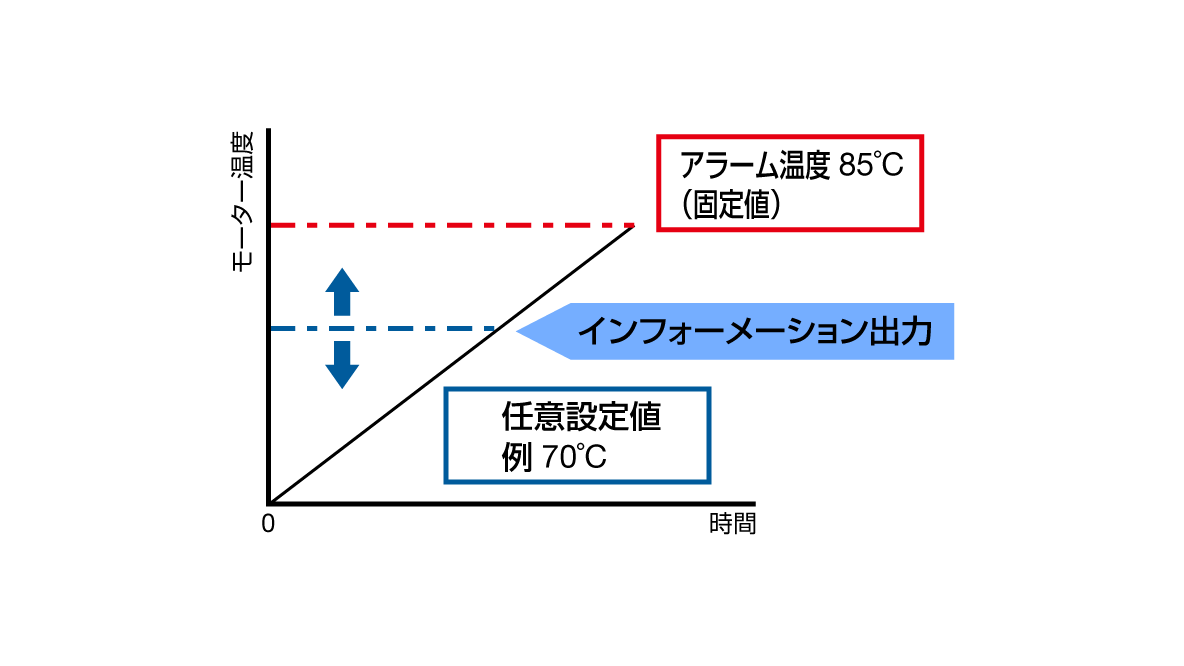
インフォメーション機能の例
TRIPインフォメーション
出力させたい回転数を事前に設定し、その回転数に達すると出力します。(モーターは運転継続)
温度インフォメーション
出力させたい温度を事前に設定し、その温度に達すると出力します。(モーターは運転継続)
配線、制御、保守部品を統一
αSTEP AZシリーズを搭載した、さまざまな機構製品をご用意しています。
それぞれ同じモーター・ドライバを搭載しているため、配線、制御、保守部品を統一できます。
配線の統一
モーターケーブル、入出力信号、電源などの配線が同じです。
制御性の統一
制御方法が同じため、同じ使い方で動かすことができます。ネットワーク制御の場合、リモートI/Oや命令コードが同じです。プログラムの作成の手間が省けます。
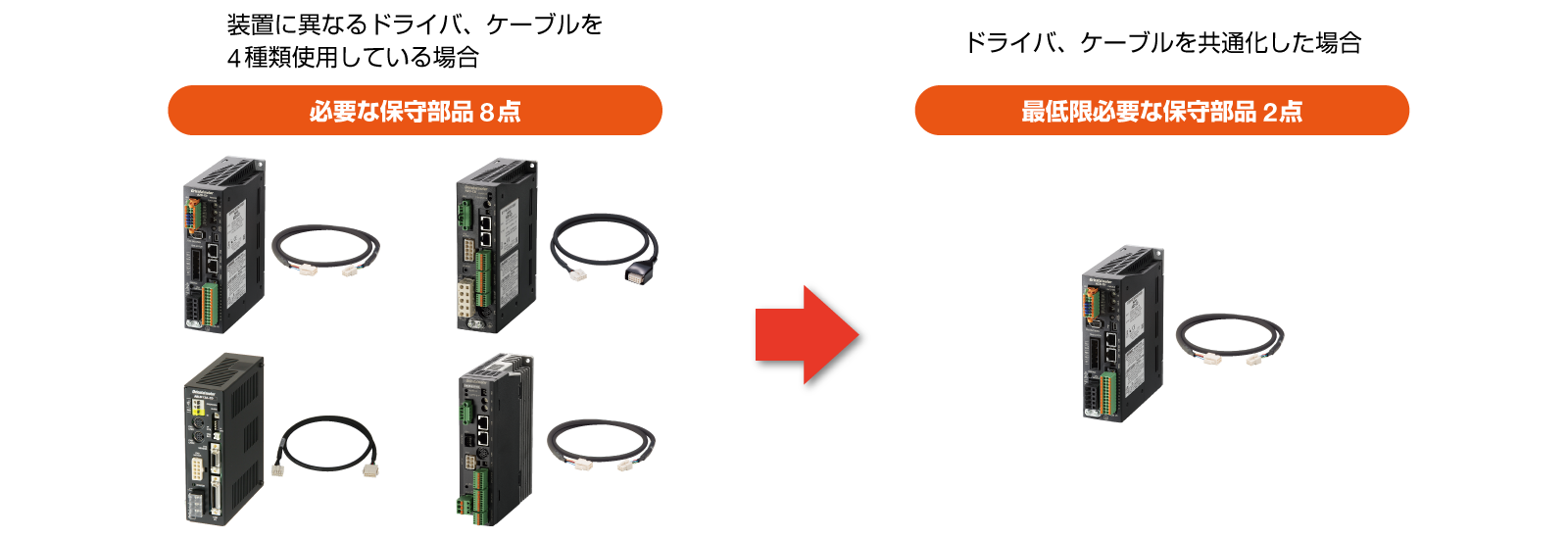
保守部品の統一
モーター、ドライバ、ケーブルが共通なため、最低限の保守部品数に抑えることができます。管理コスト(部品代、管理スペース)の削減が期待できます。
AZシリーズを搭載したラインアップ
電動アクチュエータ(AZシリーズ搭載)
| 電動スライダ | 電動シリンダ | コンパクト電動シリンダ | ラック・ピニオンシステム | 電動グリッパ | 中空ロータリーアクチュエータ |
|---|---|---|---|---|---|
| EASシリーズ EZSシリーズ EZSHシリーズ |
EACシリーズ | DRシリーズ DRS2シリーズ |
Lシリーズ LJリニアヘッド |
EHシリーズ | DGⅡシリーズ |
- 搭載モーターの電源入力はシリーズで異なります。詳細ラインアップは各シリーズのページでご確認ください。
ドライバの特徴と種類
上位システムに合わせて選べるドライバ
| ドライバタイプ | 対応インターフェイス | 単軸ドライバ | ||
|---|---|---|---|---|
| AC電源入力 | DC電源入力 | |||

|

|
|||
| ネットワーク対応 | FAネットワークを通じて、上位制御機 器からドライバを直接制御 |
EtherCAT | ○ | ○ |
| EtherNet/IP™ | ○ | ○ | ||
| PROFINET | ○ | ○ | ||
| MECHATROLINK-Ⅲ | ○ | - | ||
| SSCNETⅢ/H | ○ | - | ||
| 位置決め機能内蔵 | 運転データをドライバに内蔵。 Modbus(RTU)とI/Oで制御可能。ネット ワークコンバータを使うことでCC-Link 制御が可能。 |
Modbus(RTU) I/O CC-Link※ |
○ | ○ |
| RS-485通信付きパルス列入力 | パルス信号で制御。モーターのステー タス情報をModbus(RTU)でモニタ可 能。 |
パルス列 Modbus(RTU) |
○ | ○ |
| パルス列入力 | パルス信号で制御 | パルス列 | ○ | ○ |
- ※ 別売のネットワークコンバータ使用時に対応可能です。
- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ EtherNet/IP™はODVAの商標です。
- ※ PROFINETは、PROFIBUS Nutzerorganisation e.V.(PNO)の商標または登録商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ SSCNETⅢ/Hは三菱電機株式会社の登録商標です。
- ※ CC-LinkはCC-Link協会の登録商標です。
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
さまざまな機能で、立上げからメンテナンスまでを総合サポート
-
立ち上げ・評価
配線チェックやテスト運転時に役立つ機能をご用意しています。
- 運転データの設定と保存
- I/Oモニタ
- ティーチング・リモート運転
-
調整
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
- 波形モニタ
-
診断・メンテナンス
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
- アラームモニタ
- ユニット情報モニタ
- ステータスモニタ
-
運転データ/パラメータ設定画面 -
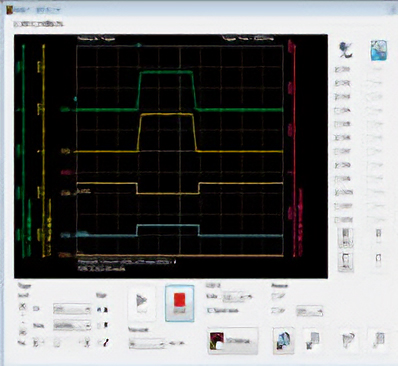
波形モニタ
ラインアップ
「リニアドモーター」「ドライバ」「接続ケーブル」はそれぞれご購入ください。
Lシリーズ AZシリーズ搭載
| ラック移動方向 | 取付角寸法 [mm] |
タイプ | 電源入力 | 可搬質量 [kg] |
使用速度範囲 [mm/s] |
ストローク [mm] |
モーター | 電磁ブレーキ |
|---|---|---|---|---|---|---|---|---|

|
60 | 高速 | AC | 7 | 0 ~ 500 | 100 ~ 800 | AZM66 | なし/付 |
| 10 | 0 ~ 250 | |||||||
| DC | 5 | 0 ~ 200 | 100 ~ 500 | |||||
| 10 | 0 ~ 100 | |||||||
| 高可搬質量 | AC | 30 | 0 ~ 90 | 100 ~ 800 | ||||
| DC | 0 ~ 50 | 100 ~ 500 | ||||||
| 80 | 高速 | AC | 7 | 0 ~ 500 | 100 ~ 1000 | |||
| 20 | 0 ~ 250 | |||||||
| DC | 7 | 0 ~ 150 | ||||||
| 20 | 0 ~ 60 | |||||||
| 高可搬質量 | AC | 70 | 0 ~ 40 | |||||
| 100 | 0 ~ 20 | |||||||
| DC | 50 | 0 ~ 20 | ||||||
| 100 | 0 ~ 10 |
ドライバ
| ドライバタイプ | 電源入力 [V] |
|
|---|---|---|
| 位置決め機能内蔵 | 単相100-120 単相/三相200-240 DC24/48 |
|
| RS-485通信付きパルス列入力 | ||
| パルス列入力 | ||
| EtherCAT対応 | ||
| EtherNet/IP対応 | ||
| PROFINET対応 | ||
| MECHATROLINK-Ⅲ対応 | 単相100-120 単相/三相200-240 |
|
| SSCNETⅢ/H対応 |
接続ケーブルセット/可動接続ケーブルセット
- モーターから出ているモーターケーブルは、ドライバに直接接続できません。接続ケーブルを合わせてご検討ください。
- ケーブルが屈曲される場合には、可動接続ケーブルをお使いください。
| 長さ [m] |
|
|---|---|
 |
0.5 ~ 20 |
 |
ラック・ピニオンシステム Lシリーズについて、「機種」「運転条件」に合わせて目安となる位置決め時間を算出できるサポートツールをご用意しています。
関連製品
AZシリーズ 多軸ドライバ DC電源入力
当社のAZシリーズDC電源入力のモーターと、それらを搭載している電動アクチュエータを接続できます。

-

2軸タイプ -

3軸タイプ -

4軸タイプ -

NEW
スリムタイプ
(4軸)
- スリムタイプの詳細は、最寄りの支店・営業所またはお客様ご相談センターにお問い合わせください。
- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ SSCNETⅢ/Hは三菱電機株式会社の登録商標です。
AZシリーズ miniドライバ DC電源入力
ボックス型のドライバより、さらに小型・軽量に設計されたminiドライバです。バッテリ電源にも対応し、今まで以上にさまざまな用途でご活用いただけます。


Lシリーズ
ACスピードコントロールモーター DSCシリーズ搭載
ラック・ピニオン機構とACスピードコントロールモーターを一体化。DSCシリーズを搭載し、リーズナブルに速度制御を実現します。
LJリニアヘッド、LHリニアヘッド
ラック・ピニオン機構のリニアヘッドはACモーターと直結することにより 押す、引く、上げる、下げるなどの直線動作が簡単に得られます。


製品を絞り込む
