



製品情報
製品・シリーズを選ぶ









課題解決
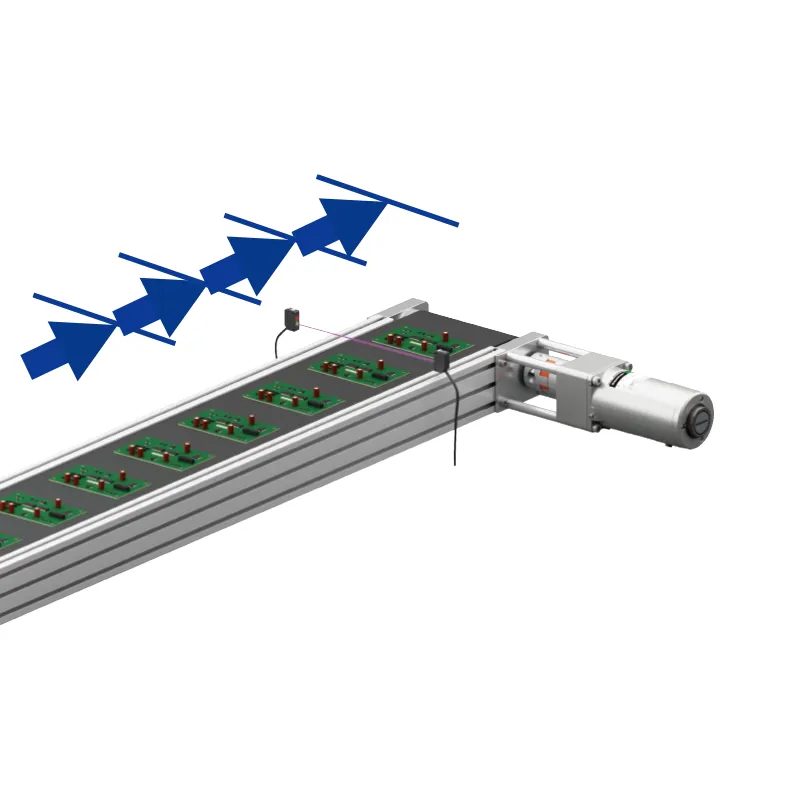
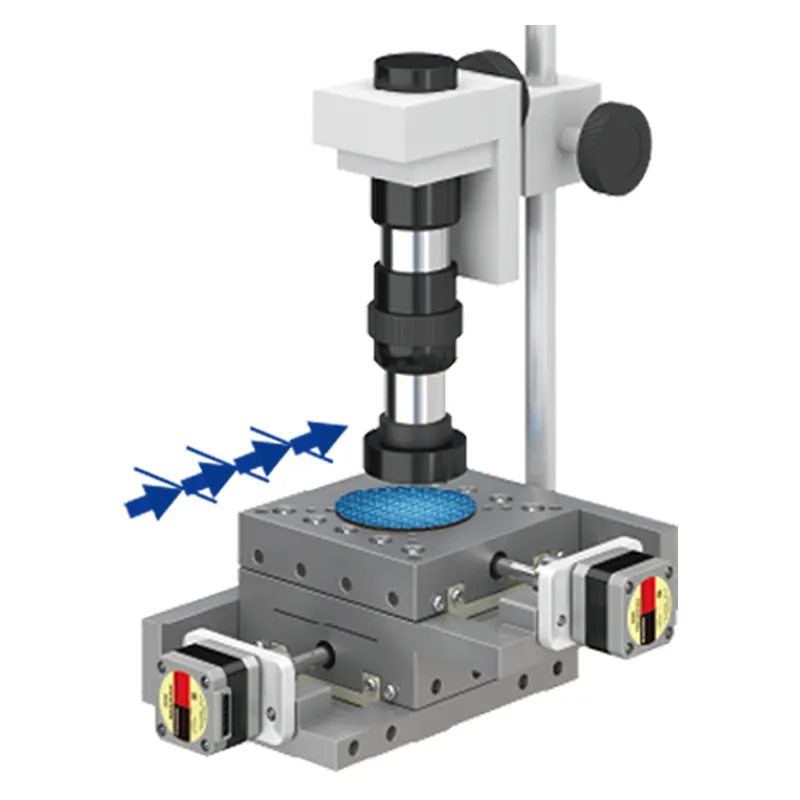
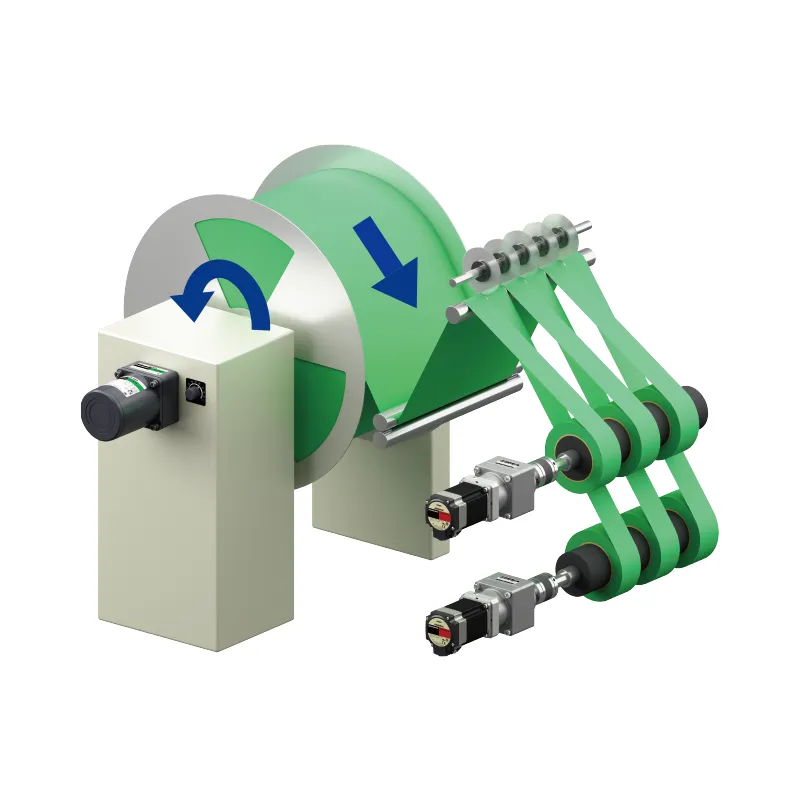
装置内製事例
当社で内製した装置の事例をご紹介します。これらはすべて実際の製造現場で使われています。


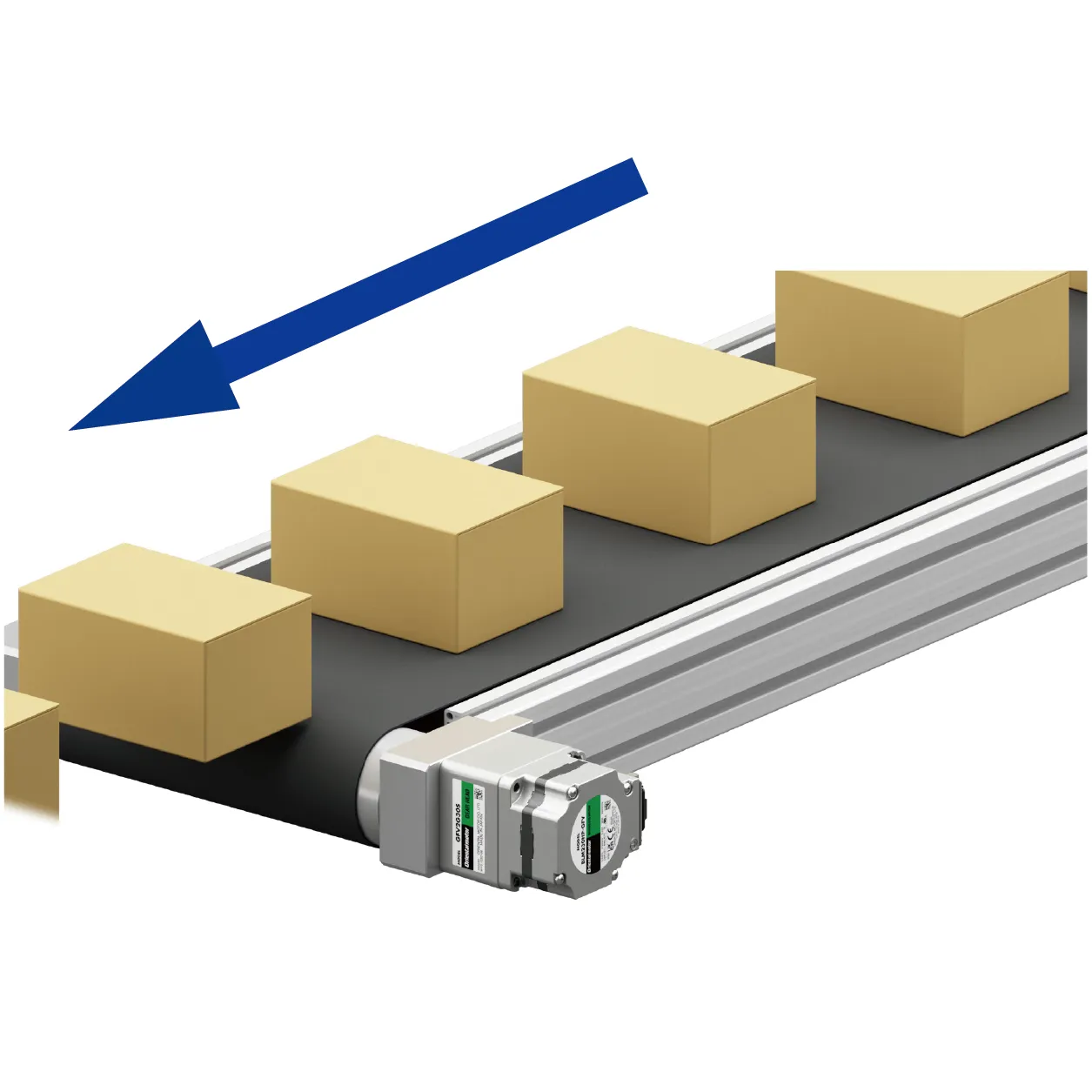
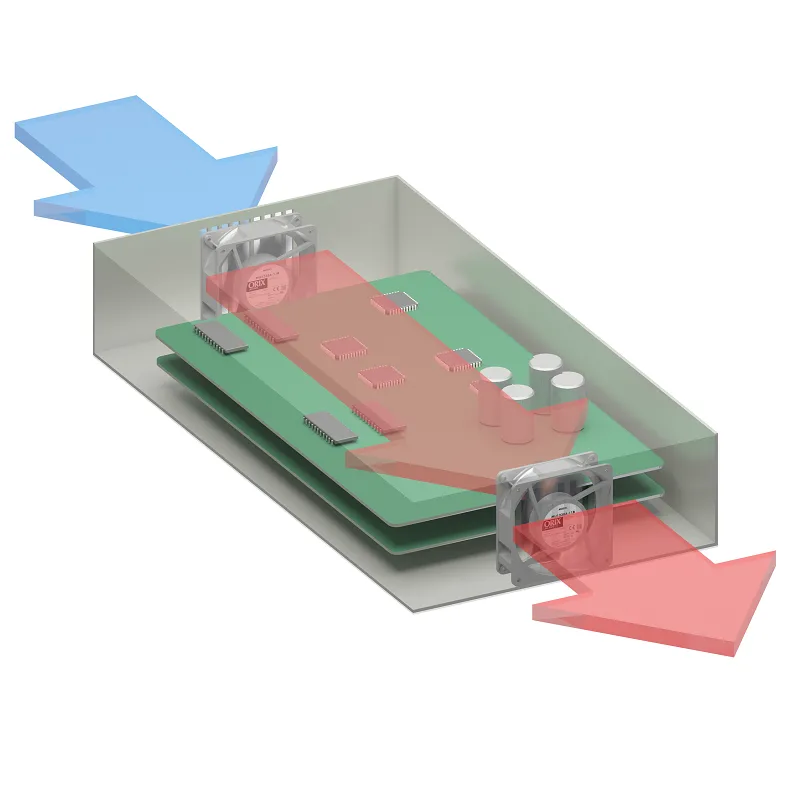
解決提案
装置の課題に対する具体的なソリューション事例や、当社製品の選び方・活用方法について、イラストや動画を用いてわかりやすくご紹介します。

注目記事
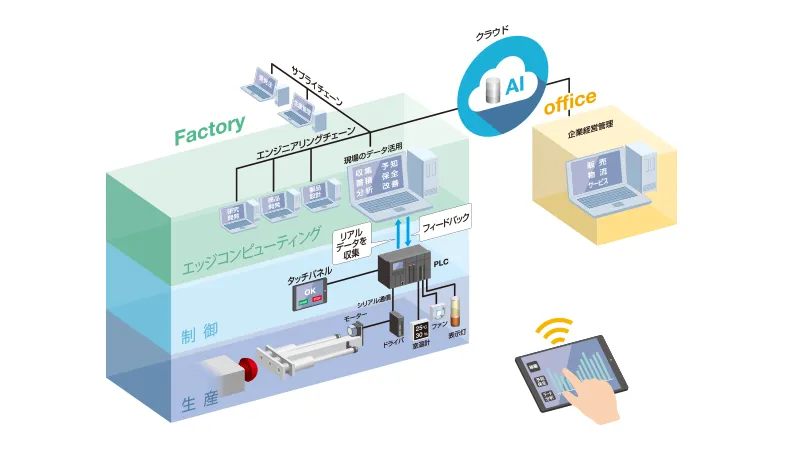
自動化を支援するオリエンタルモーターの最新動向

自動化を支援するオリエンタルモーターの最新動向
自動化に欠かせない産業用小型モーターを幅広く手掛けるオリエンタルモーター。お客様の課題に対してどのようにお応えしようとしているのか最新の動向をインタビュー記事などでご紹介します。
さらに詳しく
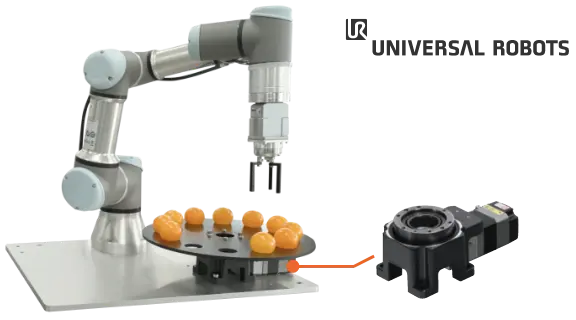
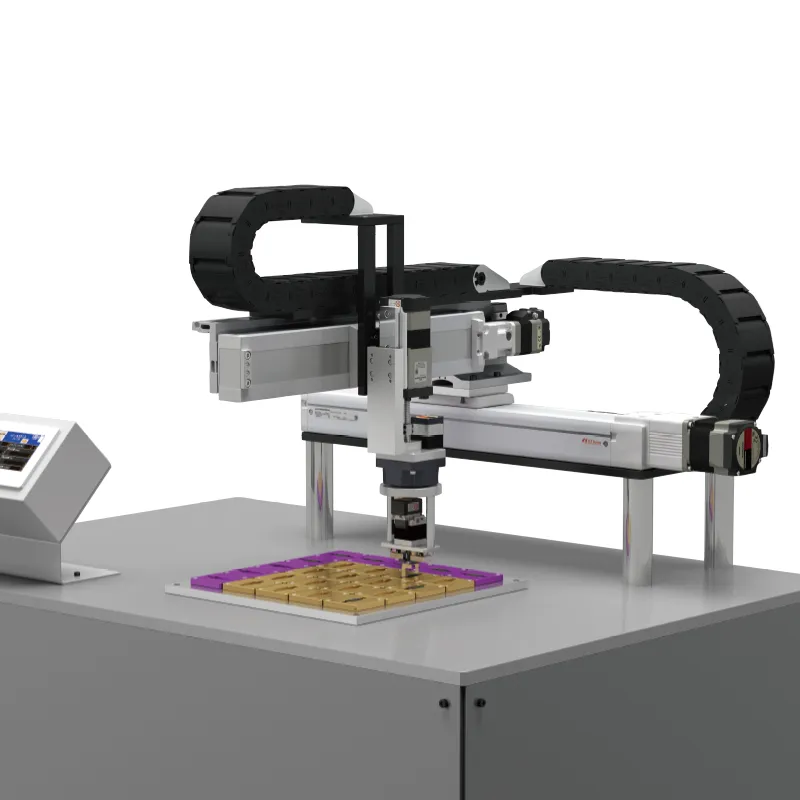
ロボット内製化支援特集
ロボット内製化支援特集
ロボットの需要が増す一方、産業用ロボット導入には二の足を踏む企業が多い現在。自動化の動向や、「ロボット内製化」に関する事例をご紹介します。
さらに詳しく

新着情報
新製品情報
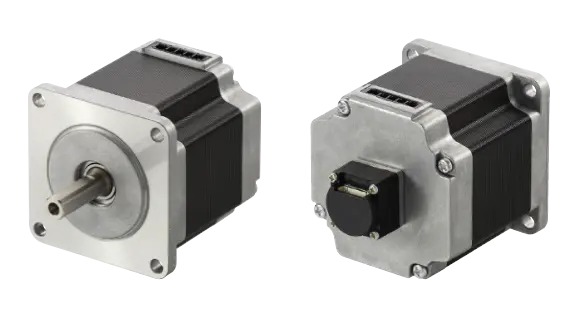
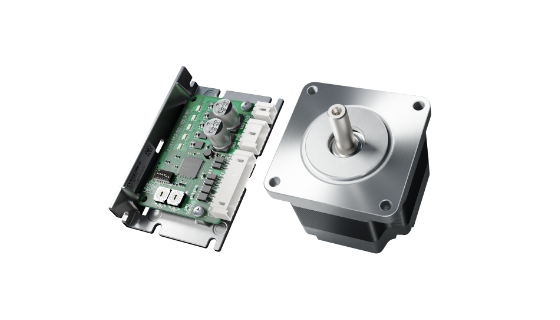
2相/5相ステッピングモーター用ドライバ CVDシリーズ 多軸タイプ EtherCAT対応

2相/5相ステッピングモーター用ドライバ CVDシリーズ 多軸タイプ EtherCAT対応
EtherCAT通信に対応した、4軸タイプの2相/5相ステッピングモーター用ドライバです。通信ケーブル1本で入出力信号の配線ができるため、省スペース・省配線なほか、上位機器を介さずにエンコーダ情報を直接取りこむことができます。
中空ロータリーアクチュエータ DGⅡシリーズ AZXシリーズ搭載 PROFINET対応
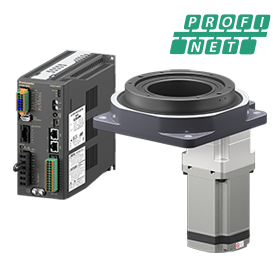
中空ロータリーアクチュエータ DGⅡシリーズ AZXシリーズ搭載 PROFINET対応
中空ロータリーアクチュエータ DGⅡシリーズ AZXシリーズ搭載にPROFINET対応ドライバを追加しました。上位制御機器とドライバを通信ケーブル1本で接続できるため、省配線を実現します。
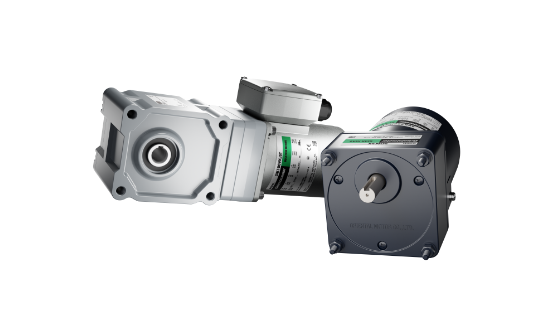
サーボモーター AZXシリーズ バッテリレスアブソリュートセンサ搭載 PROFINET対応/PSギヤードタイプ600W 減速比10、25

サーボモーター AZXシリーズ バッテリレスアブソリュートセンサ搭載 PROFINET対応/PSギヤードタイプ600W 減速比10、25
サーボモーターAZXシリーズにPROFINET対応ドライバとPSギヤードタイプ 600W 減速比10、25を追加しました。PROFINET対応ドライバは省配線を、PSギヤードタイプは従来品よりもさらに高出力・高トルクが必要な用途に使用できます。