開発事例
バッテリ不要多回転アブソリュートセンサ
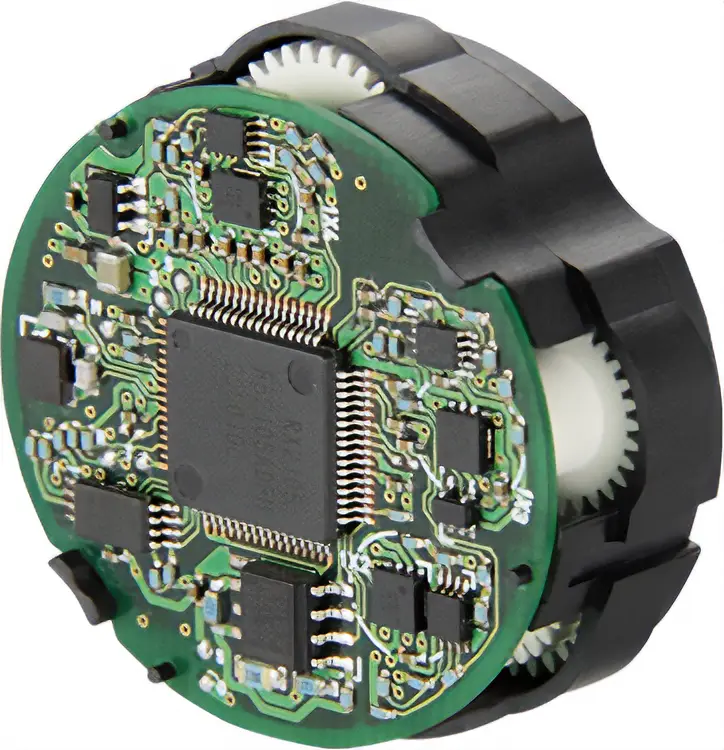
高精度樹脂部品の採用と、磁気センサを使用することで、バッテリを必要としない、小型で低コストな多回転アブソリュートセンサの開発に成功しました。
1.背景
アブソリュートシステムは、電源がオフの状態でも絶対位置情報を保持できるシステムです。原点復帰運転が必要なく、電源を入れてすぐに動かすことができるため、タクトタイムが短縮できます。また、原点復帰運転が不要になることで、原点センサやリミットセンサが不要になり、コストダウンや省配線につながります。
しかし、バッテリを使用する場合、主電源喪失後の位置情報の保持期間はフル充電状態でも2週間程度が限界です。長期休業などでは復旧時に原点再調整が必要となる場合があります。
また、バッテリには寿命があり、定期的なメンテナンスや交換が必要です。バッテリを外すと位置情報が失われるため、そのたびに装置原点の再設定をすることになります。
このような問題から、バッテリを必要としない多回転アブソリュートエンコーダが求められ、歯車機構を用いた機械式の多回転アブソリュートセンサが考案されましたが、機械式のセンサは構造が複雑で大型、高価となってしまいます。
そこでオリエンタルモーターでは、小型で安価な新しい機械式多回転アブソリュートセンサの開発に取り組みました。
2.原理と構造
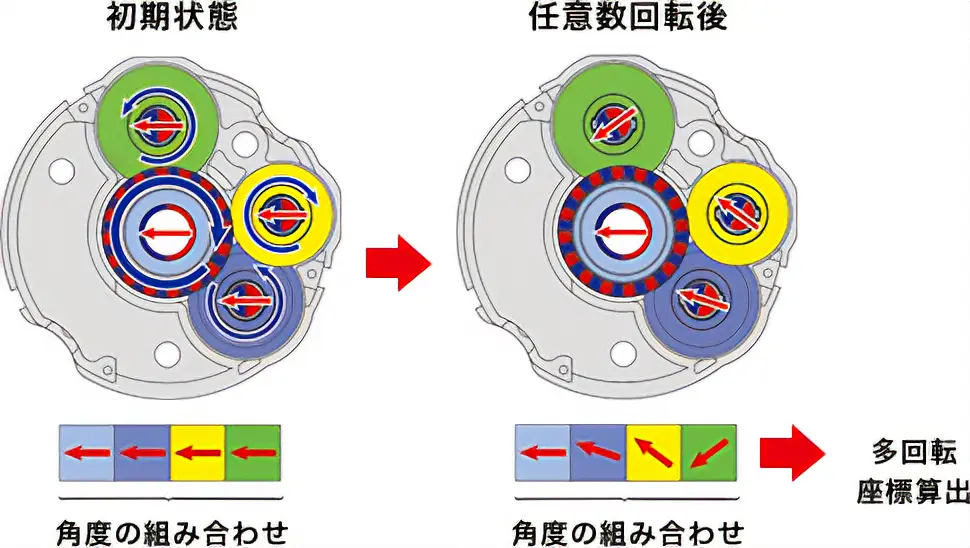
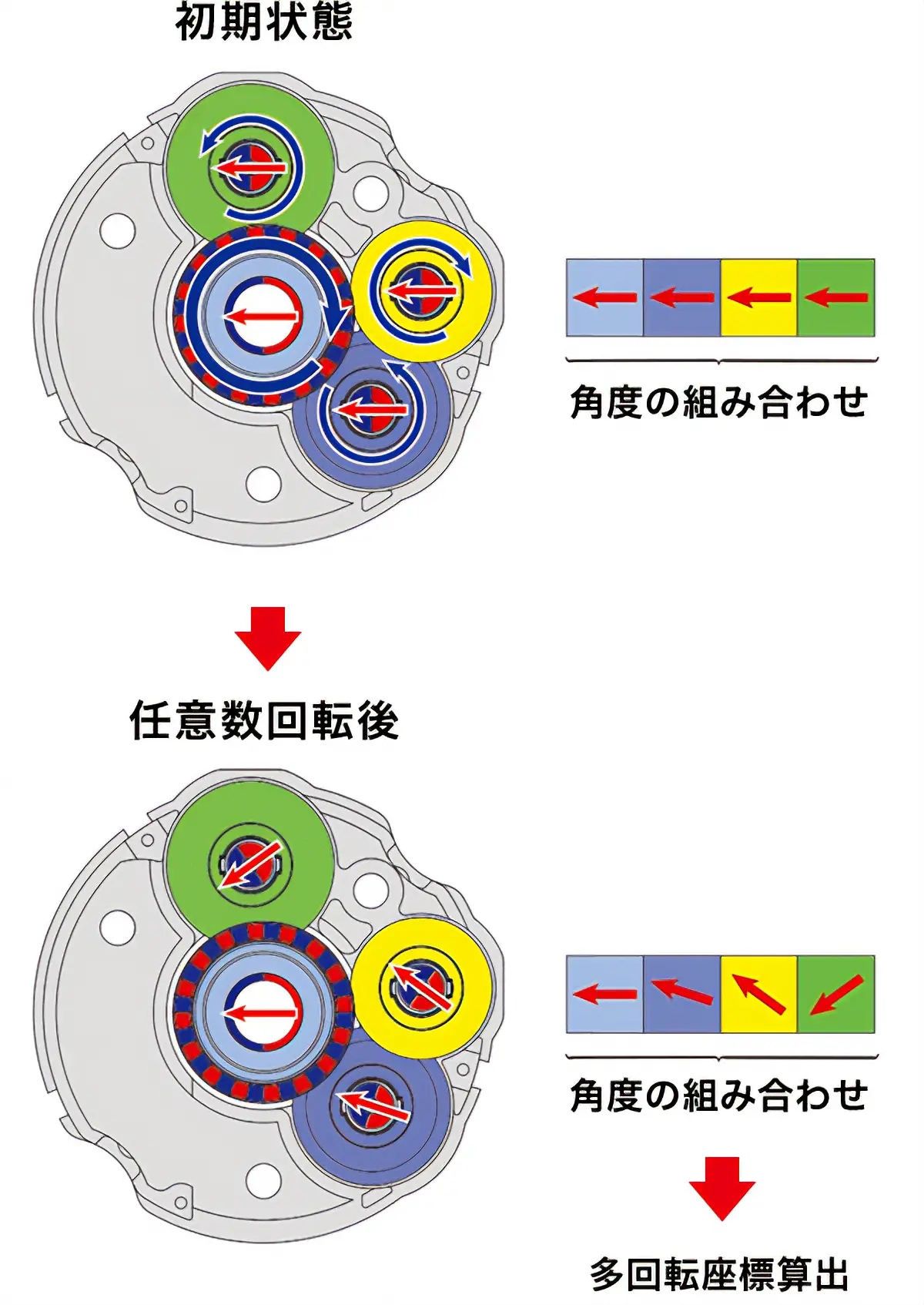
新開発のアブソリュートセンサの位置検出の仕組みは、時計の秒針・長針・短針のそれぞれの角度の組み合わせ(位相)から現在時刻を読み取る原理と類似しています。時計の針に相当するギヤを4つ搭載し、それぞれの位置をセンサで検出して位置情報を認識します。各歯車対は歯数差があり、モーターシャフト1回転ごとにかみ合う歯車の位相が変化していきます。この歯数比から生じる位相差を利用して1歯(1ピッチ)単位で歯車位相を検出し、その位相の組み合わせから多回転座標を算出しています(図参照)。全歯車の位相は1800回転で初期の位相に戻るように設計しています。これにより、1800回転分の多回転座標が検出可能となりました。


3.製品化例
新開発センサにより、バッテリが不要な多回転アブソリュートシステムの構築が可能となりました。このセンサは、「ハイブリッド制御システム αSTEPアブソリュートセンサ搭載 AZシリーズ」に搭載され、幅広い装置に採用されています。
対象の製品はこちら

ハイブリッド制御システム αSTEP アブソリュートセンサ搭載 AZシリーズ