【内製ロボット導入手順】STEP2. ロボットの設計
ロボットアームの設計
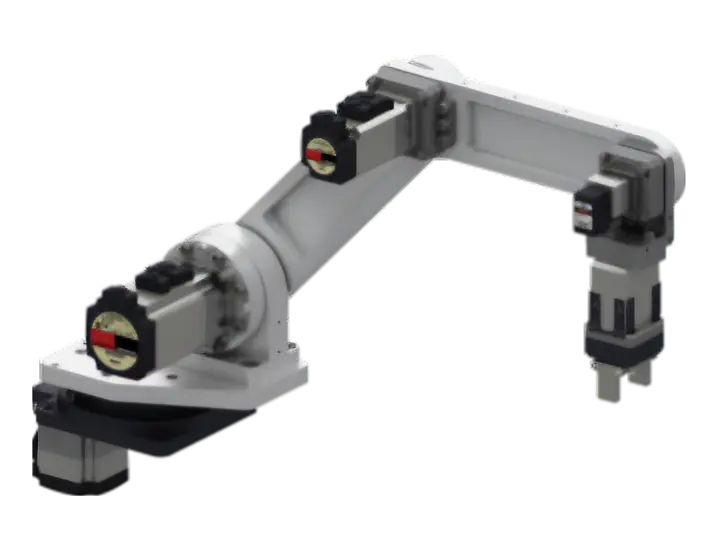
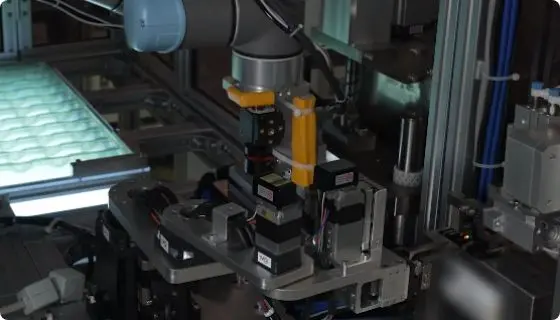
社内設備に導入したロボットは、3軸水平多関節ロボット+昇降軸(基部)+エンドエフェクタです。ロボットアームの設計情報や設計ポイントのご紹介です。
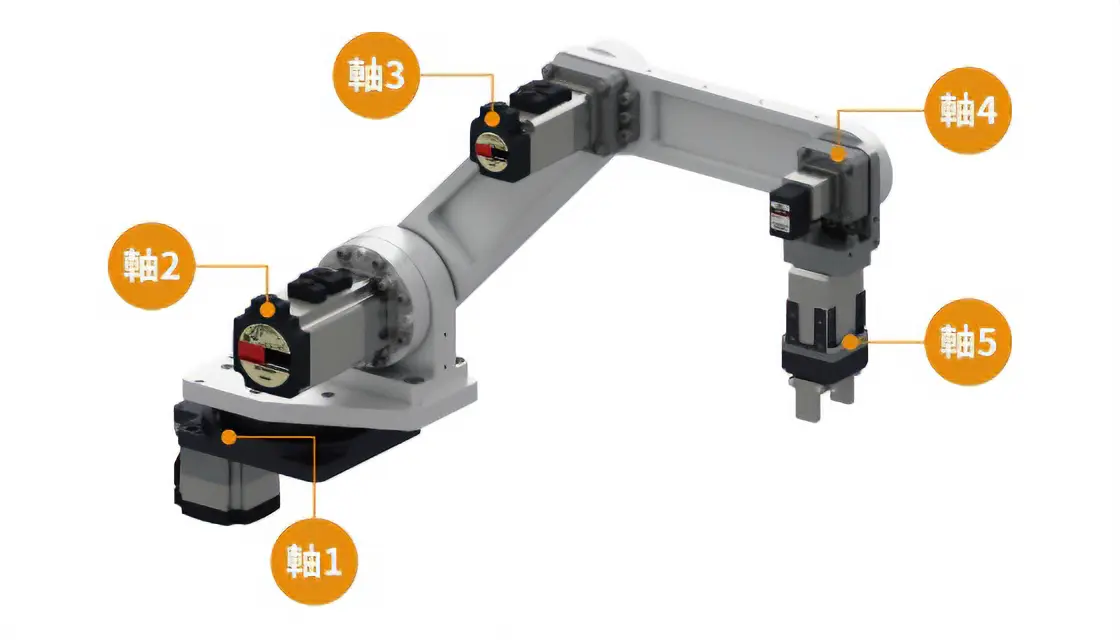
各軸の役割
軸1・軸2(肩・肘)
アームの位置制御
軸3(手首)
エンドエフェクタの角度制御
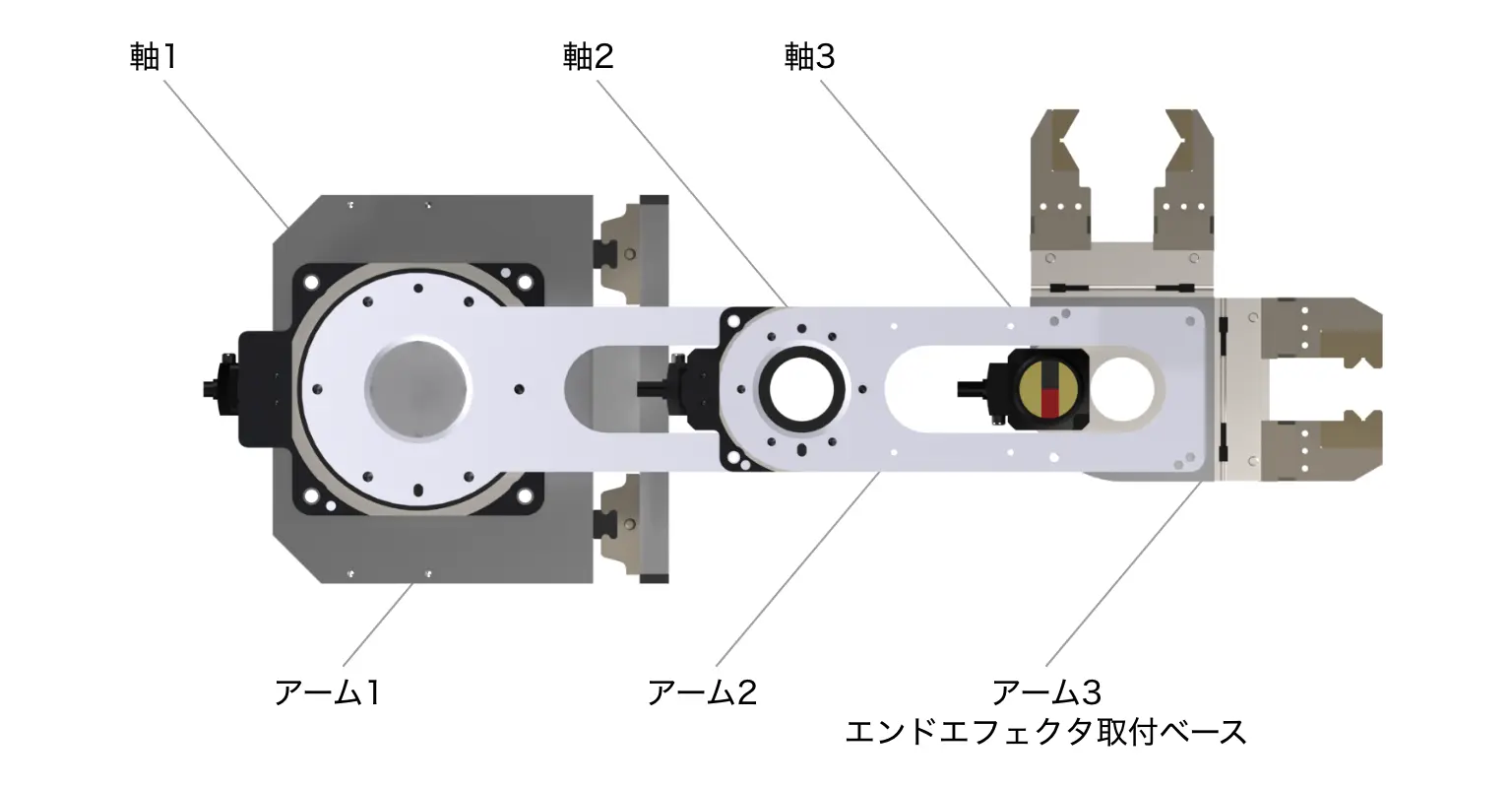
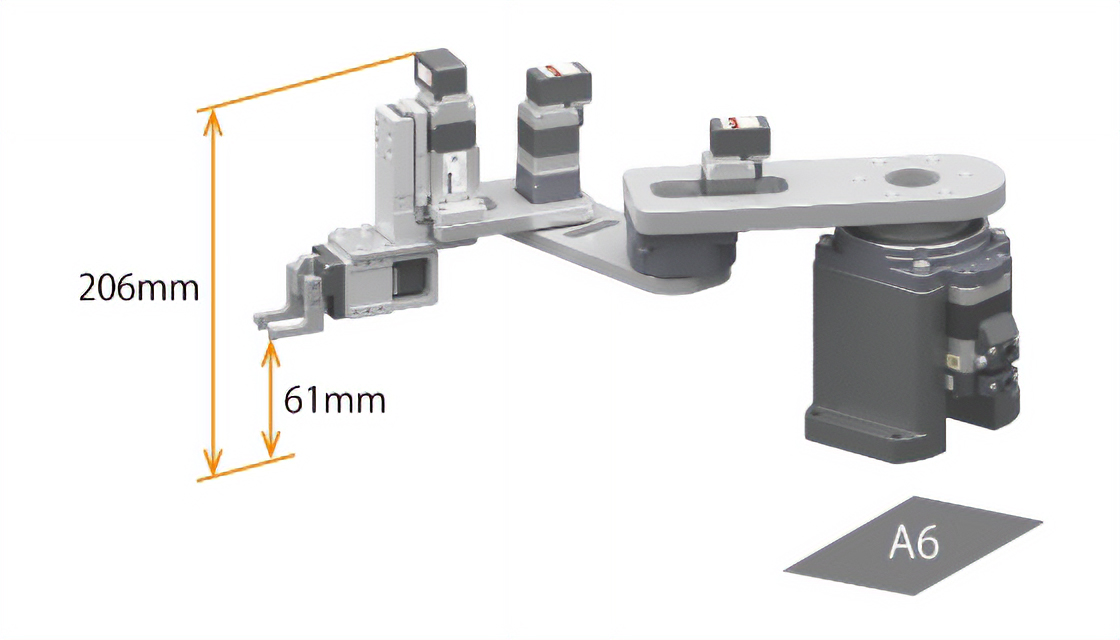
ロボットアームの設計情報
アーム全長
ロボットの設置点から目標地点までの距離は+10%が目安になります。
- ゆとりのある長さ設計が必要です。腕が伸びきった状態になってしまうと、ロボットが制御不能になります。
- ゆとりを過剰に設けるとモーターにかかる負荷が大きくなり、搬送速度などが制限されます。
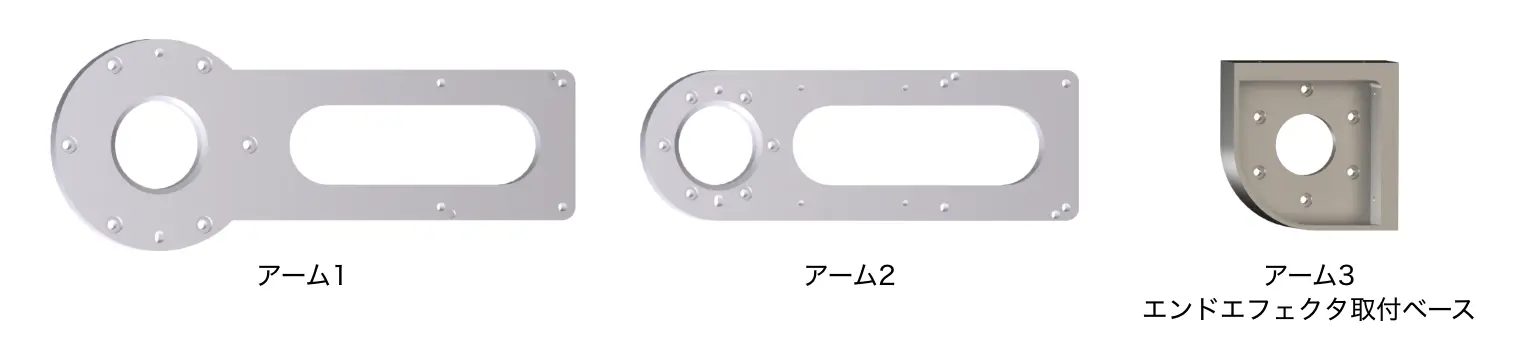
各アーム長さの比率
比率は、アーム1:アーム2:アーム3 = 4:3:1が目安になります。
- アーム1に対してアーム2が短すぎると、ロボット根元付近に死角が発生します。
- アーム3はエンドエフェクタの角度制御に使います。回転したい角度範囲でエンドエフェクタとアーム2が干渉しない長さにする必要があります。
設計ポイント
- 軽量化のため、アームにはアルミ合金(A5052)採用。
- DGⅡシリーズの中空穴を利用して配線するため、アームにも穴加工。
アーム加工・ケーブル引き回しの工夫
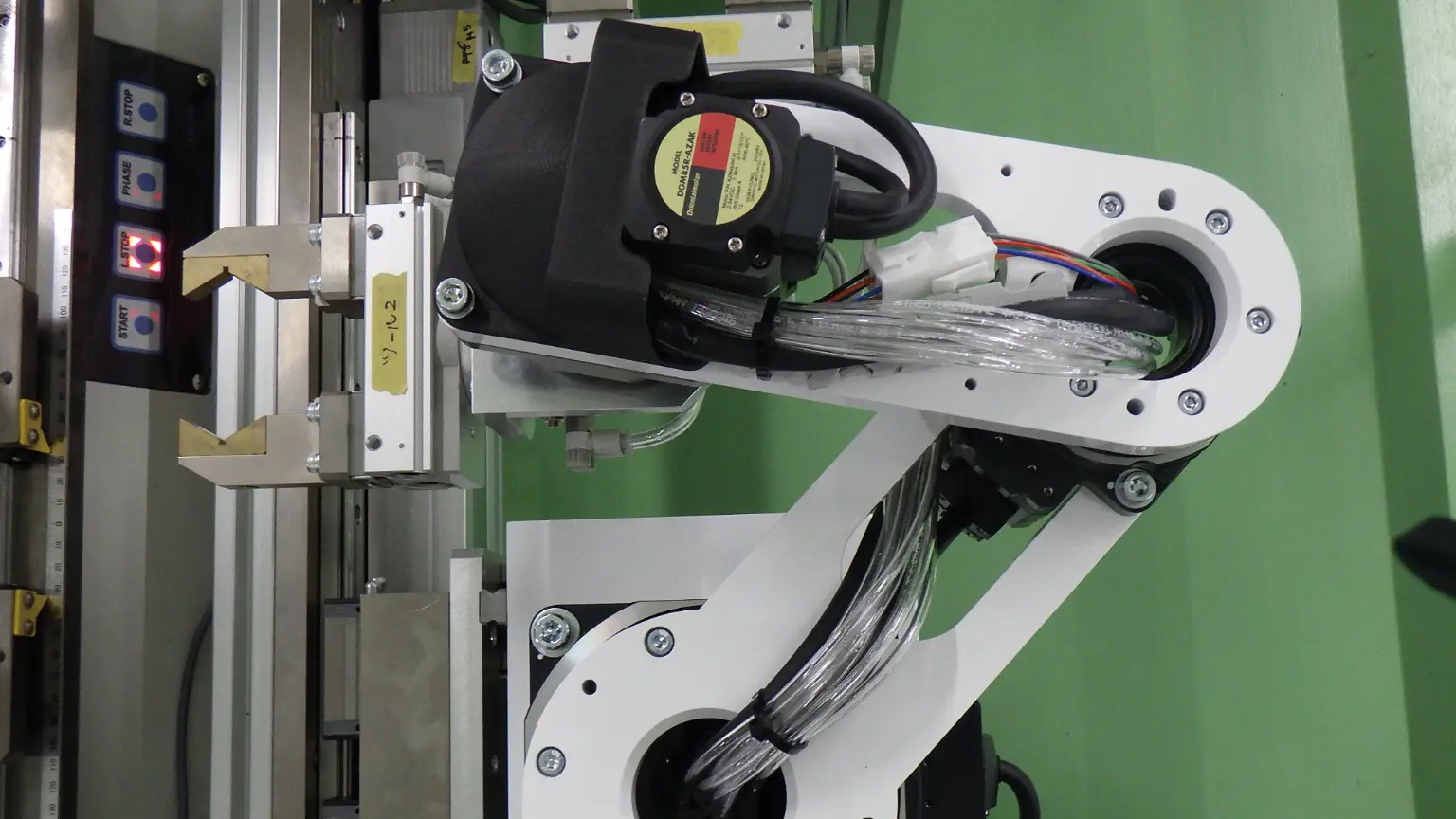
アームの肉抜き
- 軽量化による負荷軽減
- タクトタイム短縮
- ケーブル配線路に活用

結束バンド固定用タップ穴追加
- 膨らんでしまいがちなケーブル類をまとめて収納
モーター選定
専任スタッフによる選定サービス
専任スタッフがお客様に代わってモーターを選定します。選定依頼書をダウンロードし、必要事項を記入の上、お問い合わせフォームからご依頼ください。
機構の概略図やイメージ図、CADデータなどお手持ちの資料からでも対応します。
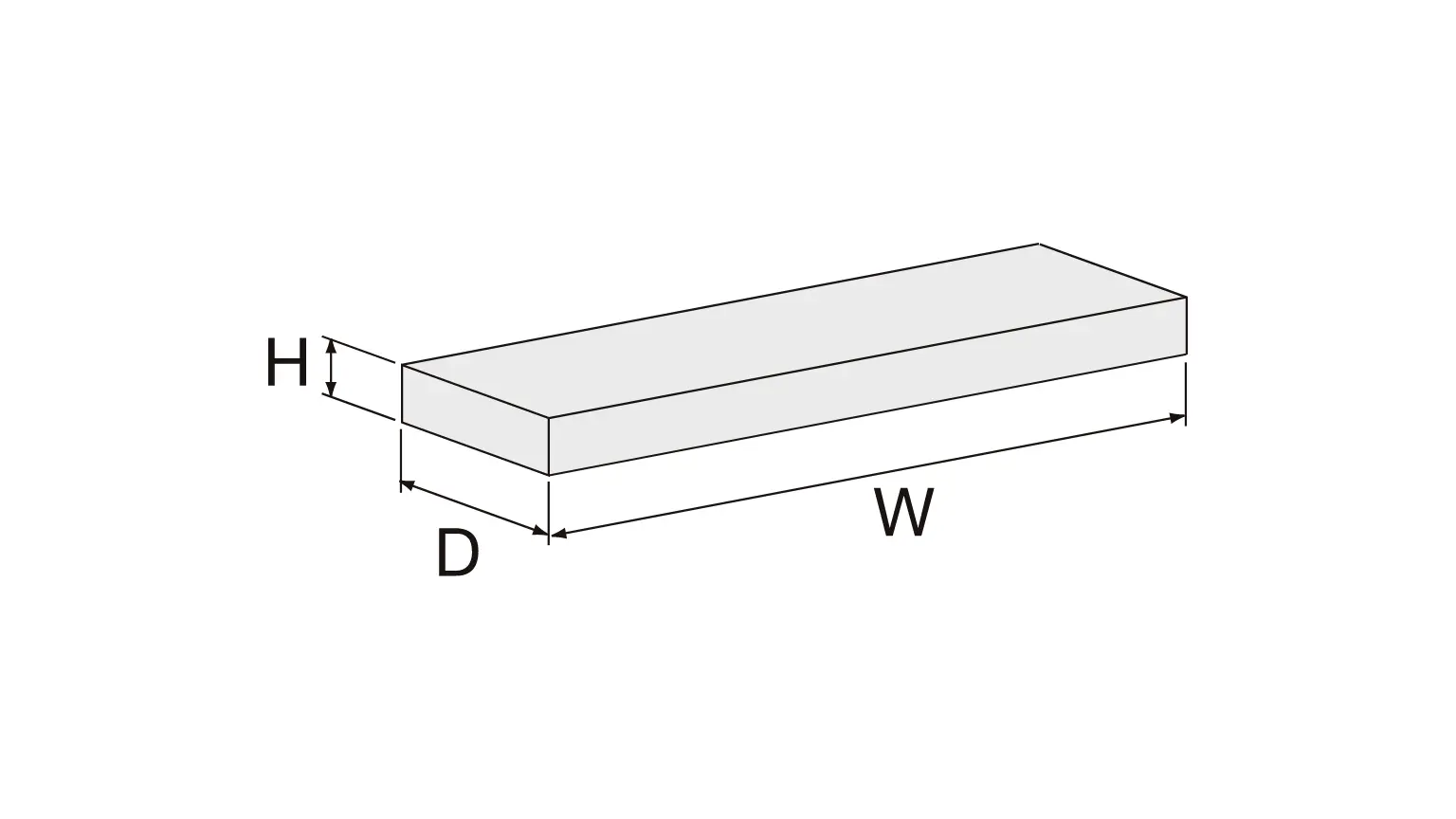
選定依頼に必要な項目
- 各アーム長さ(W)、幅(D)、厚み(H)、重量
- 各モーターの軸間距離
- エンドエフェクタの重量
- 搬送物の重量
-
< 垂直多関節ロボット > -
< スカラロボット > -

< パラレルリンクロボット >
お客様自身で選定する場合
検討項目
- 各部品の質量、重心位置
- エンドエフェクタの質量
- 慣性モーメントの計算※
- ※ 負荷が最大となる状態で計算する必要があります。水平多関節ロボットの場合は、アームが伸びきった状態です。
確認事項
- 各軸の許容トルク・許容慣性モーメントを満たしているか
- 負荷慣性モーメントによる変位量の大きさは許容内か
製品選定段階から装置設計をサポート
- 専任スタッフがお客様に代わってモーターを選定します。
- 当社内製装置の仕様や外形寸法に関する資料をご用意しています。
詳細は電話、またはWEBからお問い合わせください。
ロボットの内製化






ロボット本体やコントローラがなくてもオフラインでティーチング可能な MRC Studio Simulator詳細へ

ロボット本体やコントローラがなくてもオフラインでティーチング可能な MRC Studio Simulator
関連製品


関連コンテンツ
搬送ロボットへのソリューション提案詳細へ

搬送ロボットへのソリューション提案
「低床・スリム設計」「高耐荷重性能」「停止位置の設定・微調整」「まっすぐ走る・避ける・止まる」ことを実現可能にする各種搬送装置をご紹介します。
スカラロボット(水平多関節ロボット)詳細へ
スカラロボット(水平多関節ロボット)
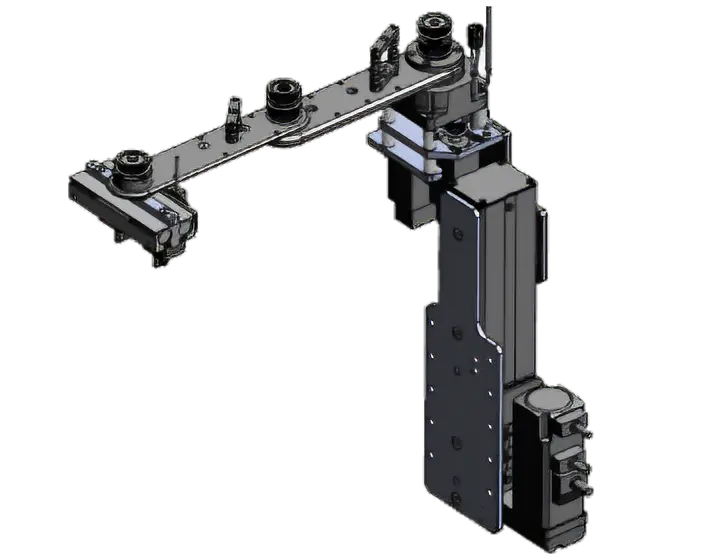
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。
ワーク処理装置詳細へ
ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。