【内製化のメリット】製品代100万円以下でロボット導入

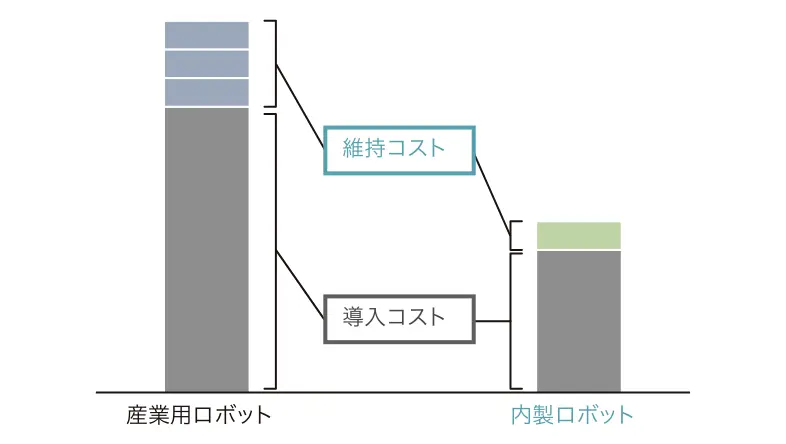
ロボットの導入を考えた時、導入コストとして一般的に数百万円と高額になるケースが多くあります。オリエンタルモーターの製品でロボットを製作した場合、製品代100万円以下で手配が可能。導入コストを大幅に削減できます。
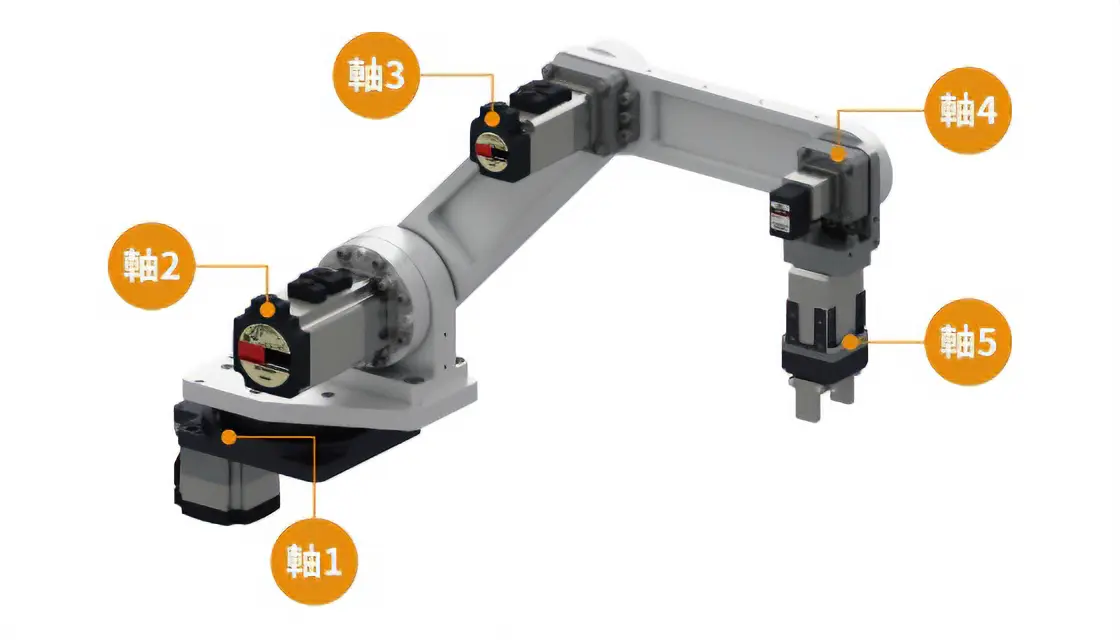
垂直多関節ロボットが製品代100万円以下※1
垂直多関節ロボット(5軸)の製作事例では、オリエンタルモーターの製品代(モーター、アクチュエータ、ドライバ、ケーブル、コントローラ、ソフトウェア)で100万円以下※1。
そのほか、オリエンタルモーター製品以外の部品代※2を加えても安価にロボットを製作できます。導入コストを削減できます。
- ※1
- 当社WEBショップ価格(税抜)で算出。
- ※2
- アーム、取付プレート、ハンド用ツメ等で数十万円程度がプラスになります(PLCなどの電装系は除く)。
使用製品の価格表
| 軸 | 製品名 | 定価 | WEBショップ 価格 |
|
|---|---|---|---|---|
| コントローラ | コントローラ | MRC01 | 220,000円 | 187,000円 |
| 通信ケーブル | CC02FLT6 | 4,900円 | 4,160円 | |
| 軸1 | モーター | DGM130R-AZAK | 192,500円 | 163,620円 |
| ドライバ | AZD-KR2D | 37,400円 | 31,790円 | |
| ケーブル | CCM030Z2ABF | 5,500円 | 4,670円 | |
| 電源ケーブル | LCD06Z2AY | 1,600円 | 1,360円 | |
| 軸2 | モーター | AZM66MK-HS100(相当)※1 | 138,000円 | 117,300円 |
| ドライバ | AZD-KR2D | 37,400円 | 31,790円 | |
| ケーブル | CCM030Z2ACR | 13,300円 | 11,300円 | |
| 電源ケーブル | LCD06Z2AY | 1,600円 | 1,360円 | |
| 軸3 | モーター | AZM46MK-HS100(相当)※2 | 103,000円 | 87,550円 |
| ドライバ | AZD-KR2D | 37,400円 | 31,790円 | |
| ケーブル | CCM030Z2ACR | 13,300円 | 11,300円 | |
| 電源ケーブル | LCD06Z2AY | 1,600円 | 1,360円 | |
| 軸4 | モーター | AZM24AK-HS100(相当)※3 | 83,900円 | 71,310円 |
| ドライバ | AZD-KR2D | 37,400円 | 31,790円 | |
| ケーブル | CCM030Z2AAR | 9,700円 | 8,240円 | |
| 電源ケーブル | LCD06Z2AY | 1,600円 | 1,360円 | |
| 軸5 | モーター | EH4-AZAKH | 72,600円 | 61,710円 |
| ドライバ | AZD-KR2D | 37,400円 | 31,790円 | |
| ケーブル | CCM030Z2AAR | 9,700円 | 8,240円 | |
| 電源ケーブル | LCD06Z2AY | 1,600円 | 1,360円 | |
| 1,061,400円 | 902,150円 | |||
- ※1
- 実際の装置にはAZM66MKにハーモニックドライブ社のCSG-20-100-2UH-LW-SP-Bの組み合わせで使用しています。
- ※2
- 実際の装置にはAZM46MKにハーモニックドライブ社のCSF-11-100-2UP-SP-Cの組み合わせで使用しています。
- ※3
- 実際の装置にはAZM24AKにハーモニックドライブ社のCSF-8-100-2UP-SP-Aの組み合わせで使用しています。
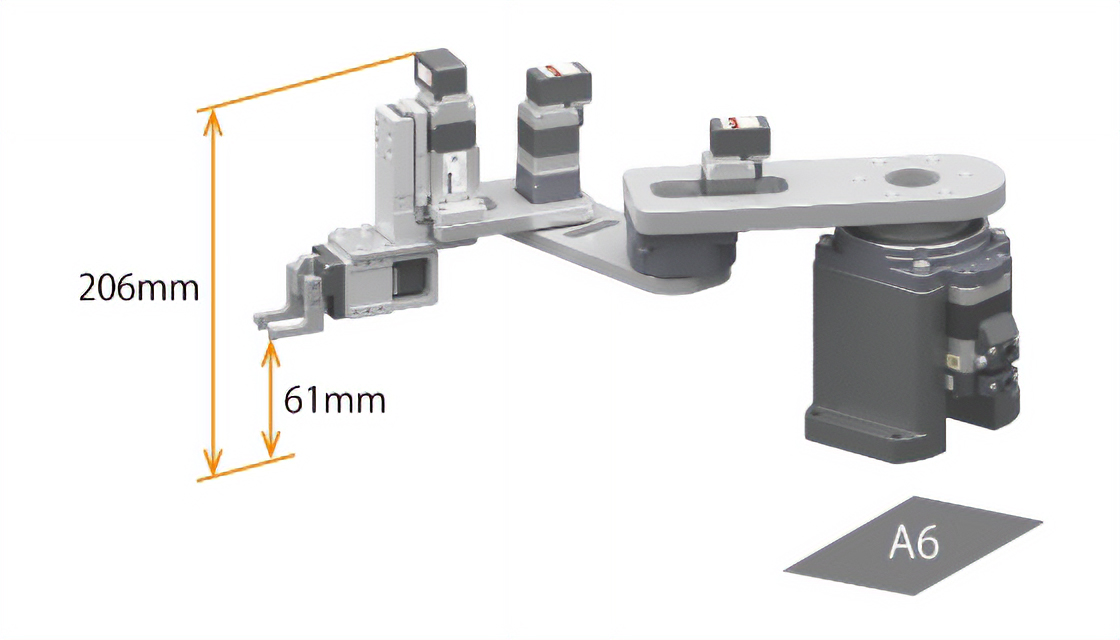
構成された部品で組み立てた5軸垂直多関節ロボット

垂直多関節5軸デモ機の動画
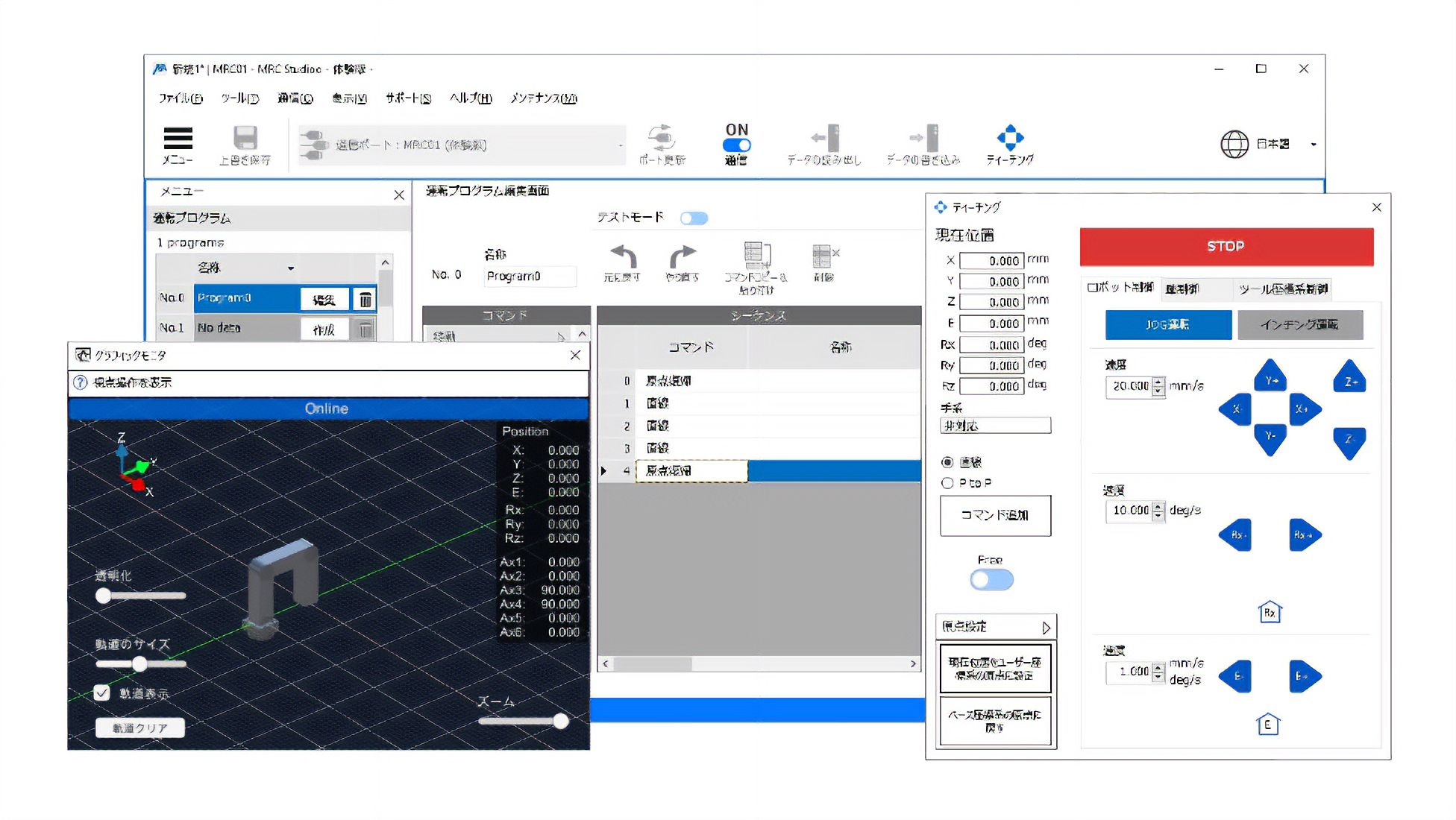
低価格のコントローラ、無料のソフトウェア
ロボットコントローラMRC01は、ロボット動作に必要な基本的な機能を搭載し、低価格での提供を実現しています。また専用プログラミングソフトMRC Studioは無料でダウンロード可能。ラダープログラムなどの専門知識がなくても、直感的にプログラムを入力できます。

MRC Studioの操作性を確認できるSimulatorを用意しています。MRC01がなくても利用でき、グラフィックモニタを使ってロボットの動きを把握できます。
製品選定段階から装置設計をサポート
- 専任スタッフがお客様に代わってモーターを選定します。
- 当社内製装置の仕様や外形寸法に関する資料をご用意しています。
詳細は電話、またはWEBからお問い合わせください。
ロボットの内製化







関連コンテンツ

搬送ロボットへのソリューション提案
「低床・スリム設計」「高耐荷重性能」「停止位置の設定・微調整」「まっすぐ走る・避ける・止まる」ことを実現可能にする各種搬送装置をご紹介します。
スカラロボット(水平多関節ロボット)
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。
ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。