ロボット本体やコントローラがなくてもオフラインでティーチング可能な MRC Studio Simulator

MRC Studio Simulator は、ロボット本体やMRC01がなくても、実際の動きを想定したシミュレーションが可能なソフトウェアです。 無料でダウンロードできるため、ロボット導入を検討している段階でも気軽にご利用いただけます。
様々なロボットタイプに対応
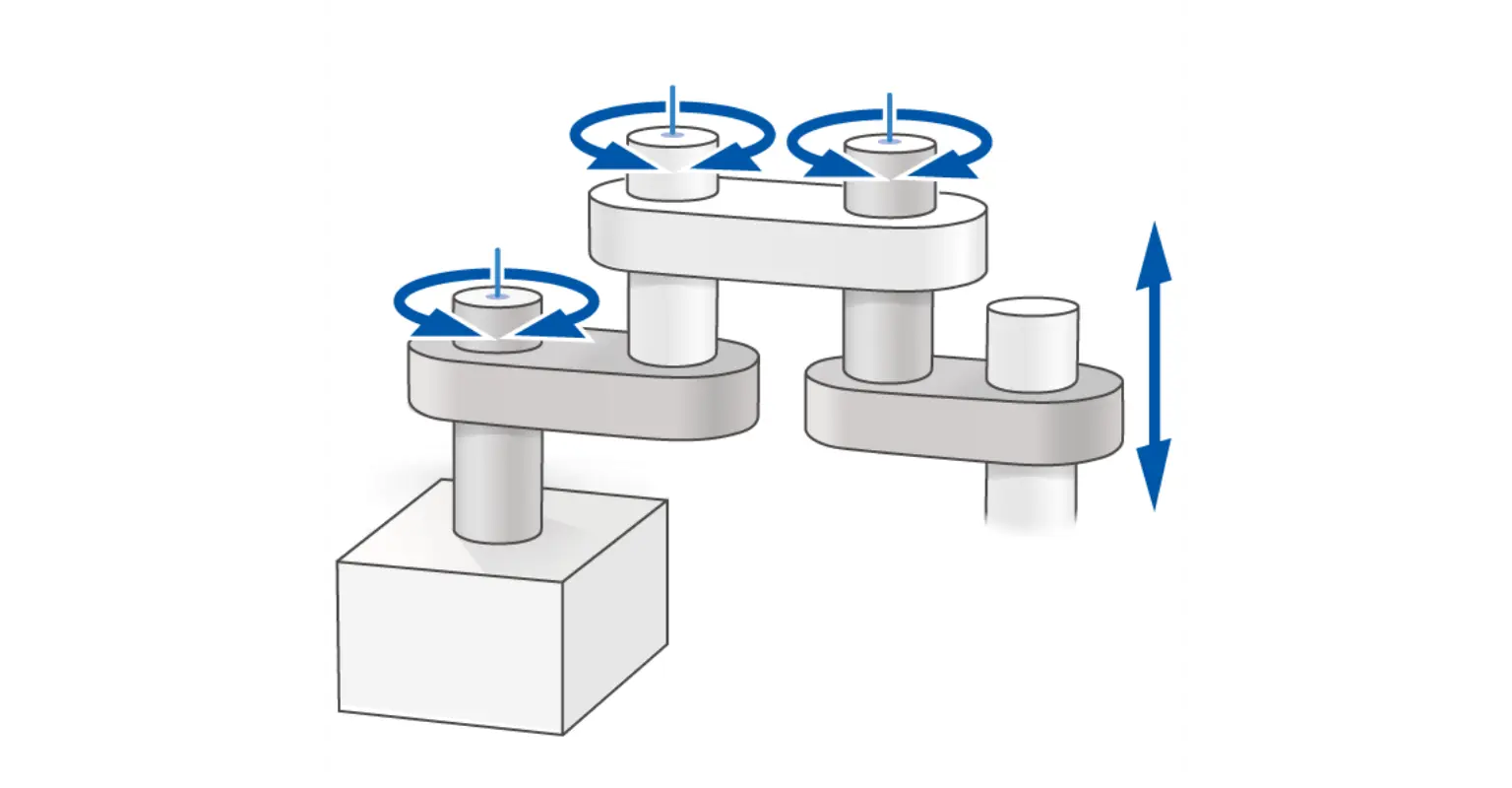
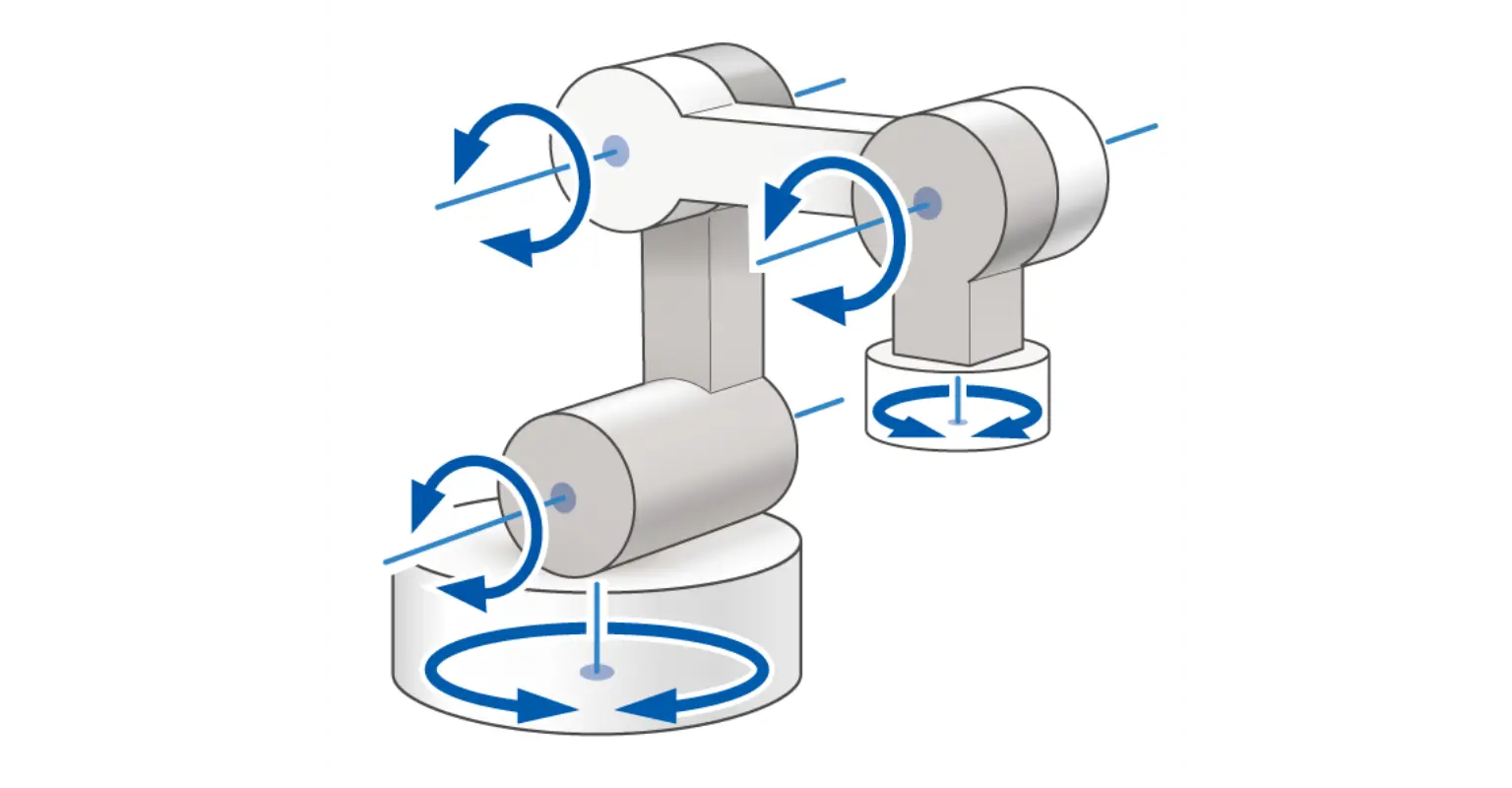
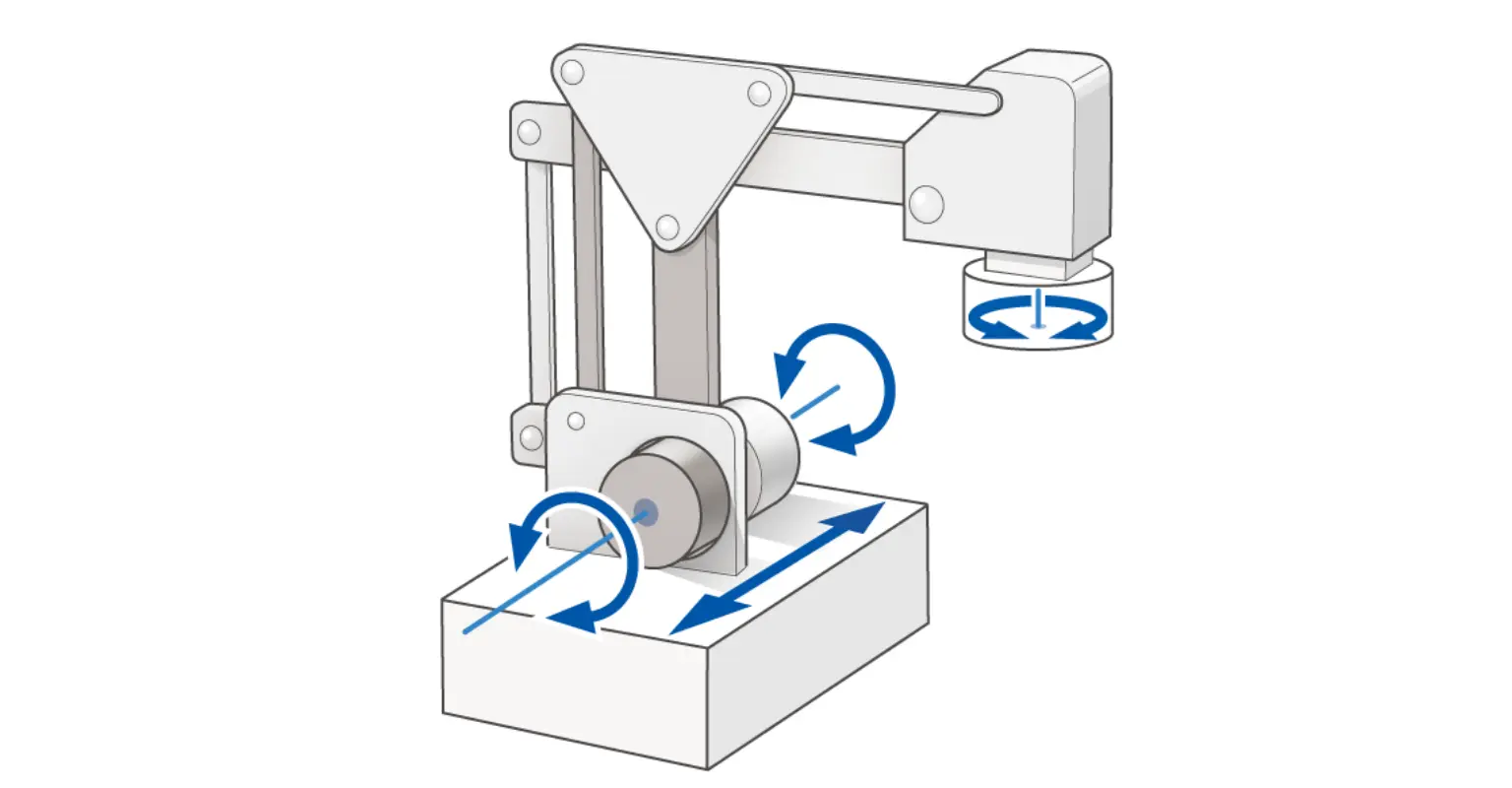
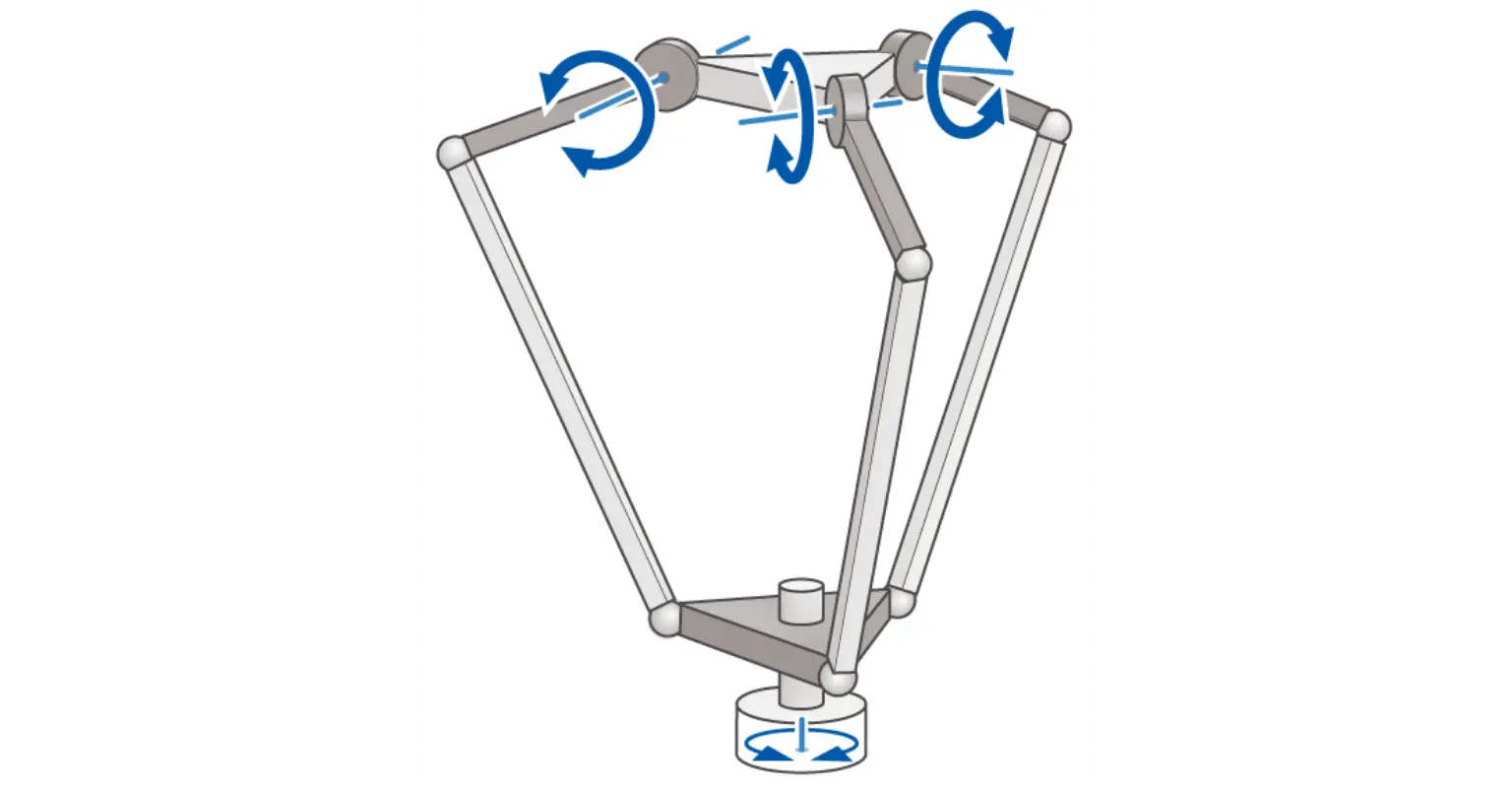
垂直多関節、水平多関節(スカラ)、直交、パラレルリンクなど、様々なロボットを選択できます。
ロボットタイプ(代表例)
| 水平多関節(スカラ) | 垂直多関節 | パレタイザー | パラレルリンク |
|---|---|---|---|
|
|
|
|
| 3リンク 先端軸昇降 | 3リンク ベース軸旋回 +Rz軸 |
2リンク機構 ベース軸直動 +Rz軸 |
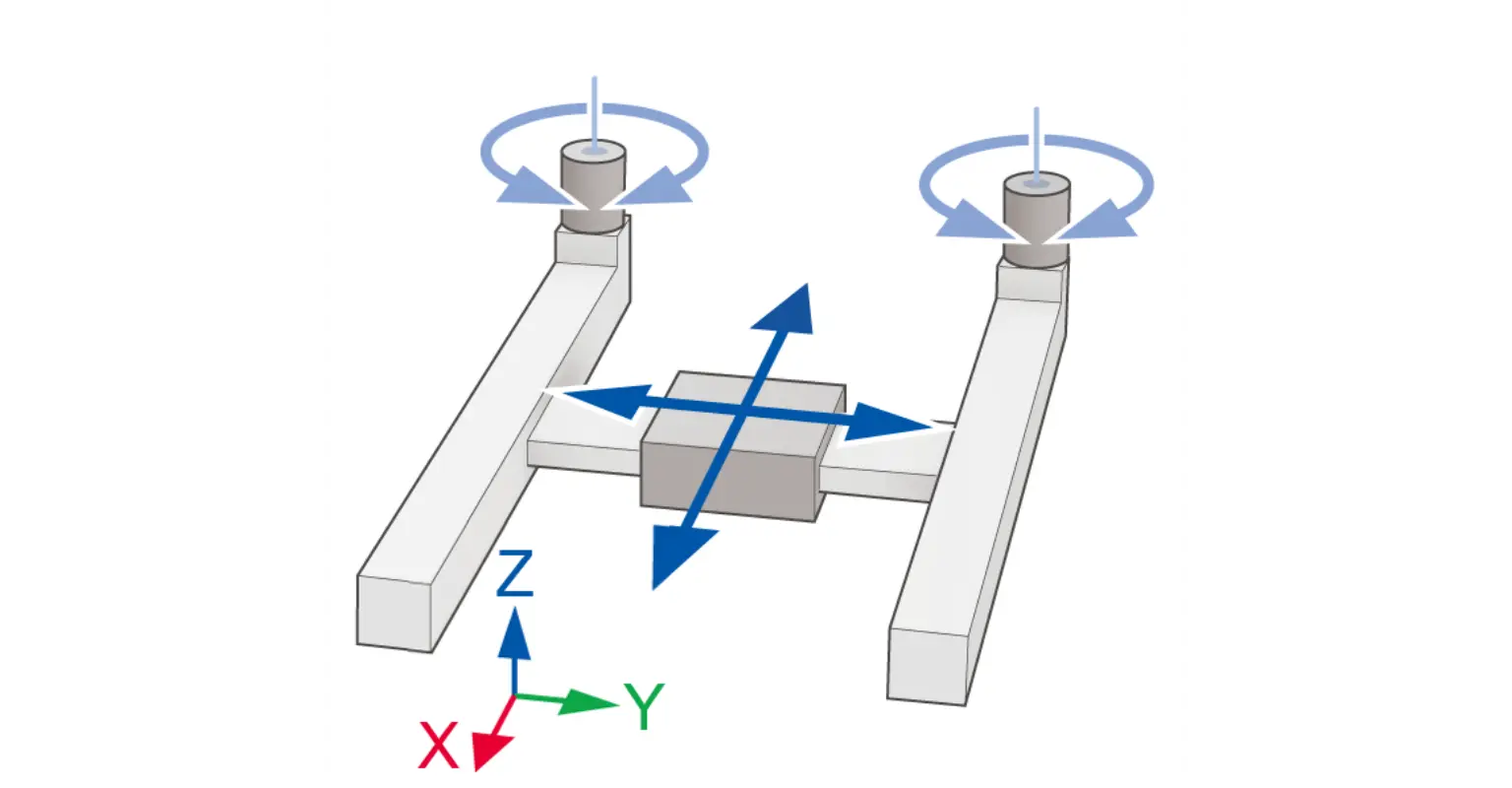
パラレルリンク +Rz軸 |
| 直交 | OVRシリーズ 垂直多関節 ロボットアーム |
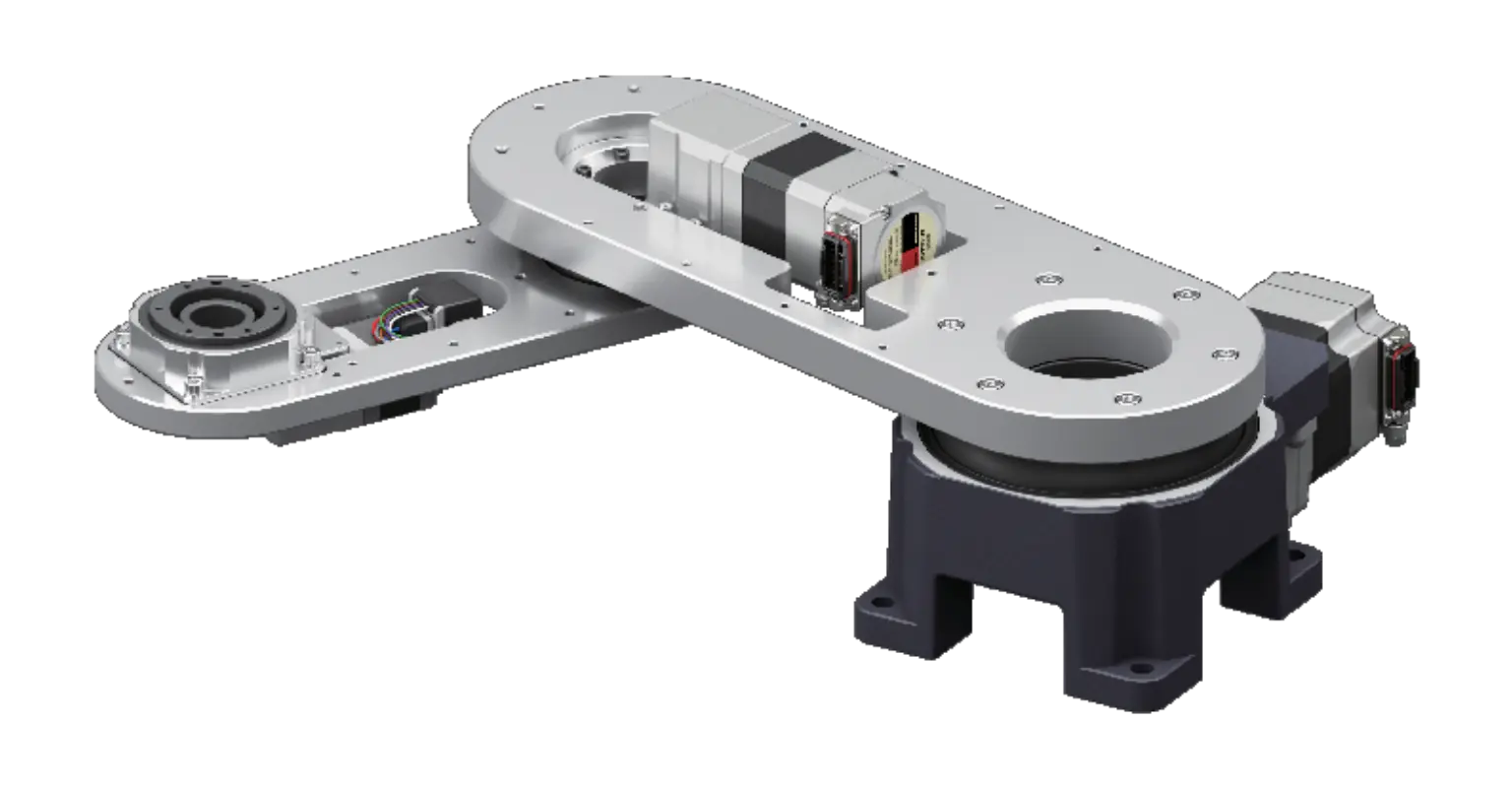
OVRシリーズ 水平多関節 ロボットアーム |
|
|---|---|---|---|
|
|

|
|
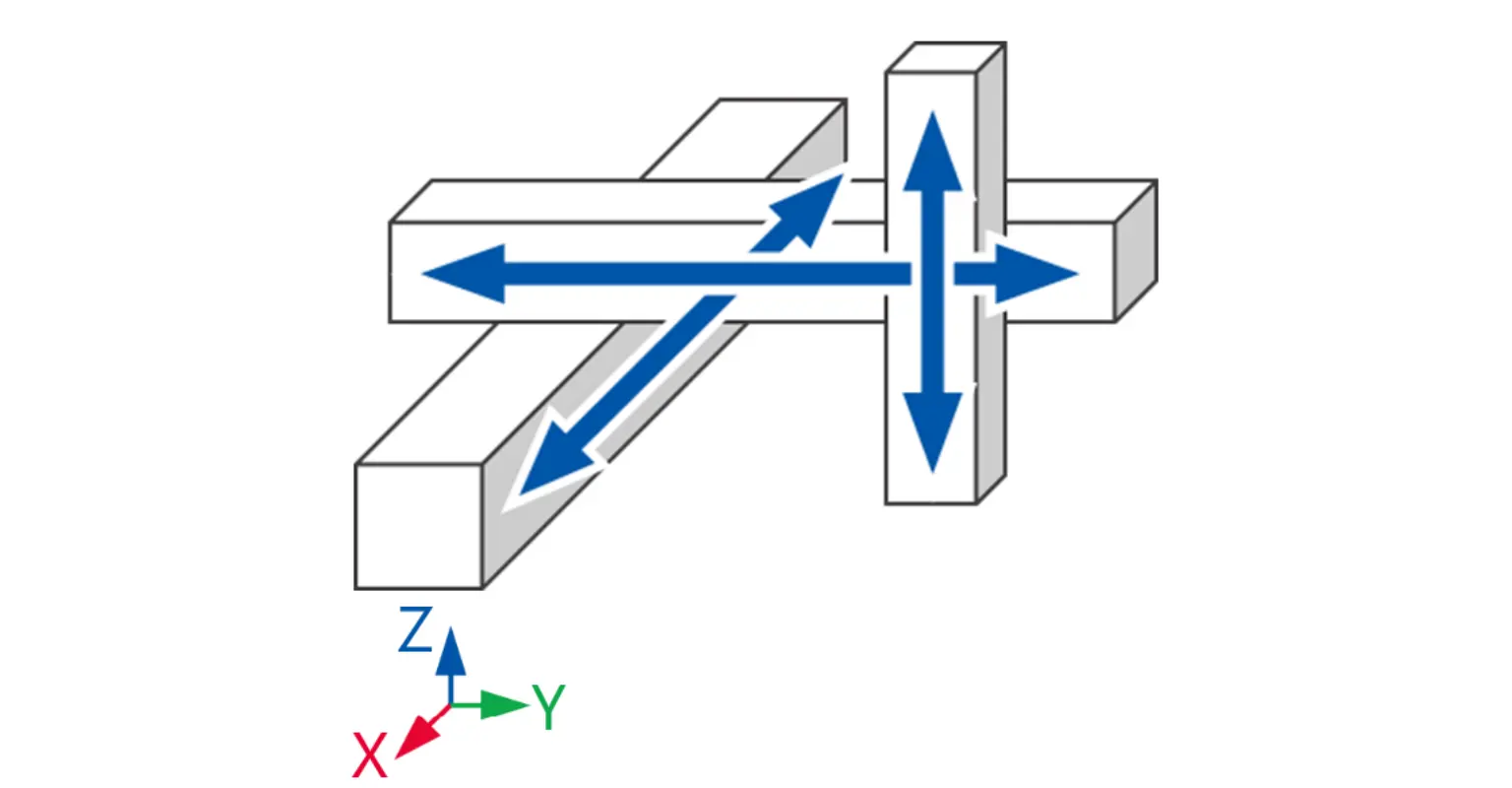
| XYZ | 平面ガントリ(XY) | OVR6048K1-V(6軸) | OVR3041K3-H(3軸) |
実際の操作の流れをシミュレート可能
ロボットのティーチングから運転プログラム作成、テスト運転の一連の流れを、MRC Studio Simulatorを使って確認していただけます。
ティーチング
ロボットの動きをグラフィックモニタで確認しながら、感覚的にティーチングすることが可能です。

運転プログラム作成
ティーチングしたポジションデータをワンクリックで運転データに転送できます。

テスト運転
テストモードをONすれば、作成したプログラムの自動運転を実行します。

MRC Studio Simulatorで作成したプログラムを本体導入時に流用可能
MRC Studio Simulatorで作成した運転プログラムは、実際のロボット導入時にそのままご使用いただけます。MRC01との通信なしであらかじめ運転プログラムを作成しておけるため、立上げ時間を短縮できます。
1. MRC Studio(製品版)を起動し、MRC Studio Simulatorで作成したデータファイルを選択・インポートします。

2. MRC Studio(製品版)に運転プログラムがインポートされます。

MRC Studio Simulator と MRC Studio(製品版)の違い
どちらも無料でダウンロードいただけます。機能の違いは次の通りです。
| 項目 | MRC Studio Simulator | MRC Studio(製品版) |
|---|---|---|
| ロボットコントローラ MRC01との通信 | - | ○ |
| セットアップ | △ ロボットコントローラ MRC01やドライバと通信する項目は設定できません。 |
○ |
| PCへの設定データファイルの保存 | ○ | ○ |
| ファイルを開く | ○ mrcxt ファイルを開けます。 |
○ mrcx ファイルを開けます。 |
| MRC Studio Simulator で作成したデータファイルのインポート | - | ○※ |
| ティーチング | ○ | ○ |
| 運転プログラム作成 | ○ | ○ |
| テスト運転 | ○ | ○ |
| パラメータ設定 | △ 設定できないパラメータがあります。 |
○ |
| モニタ | △ モニタ出来るのは以下内容です。
外部機器との接続が必要な信号系の情報はモニタできません。 |
○ |
- ※ MRC Studio Simulatorでは各軸の負荷条件は考慮されていないため、実際の動きに差異が生じる可能性があります。
初めて実機を動作させる際は、運転速度率を下げてお試しいただくことを推奨しています。
低価格のコントローラ、無料のソフトウェア
ロボットコントローラMRC01は、ロボット動作に必要な基本的な機能を搭載し、低価格での提供を実現しています。また専用プログラミングソフトMRC Studioは無料でダウンロード可能。ラダープログラムなどの専門知識がなくても、直感的にプログラムを入力できます。
製品選定段階から装置設計をサポート
- 専任スタッフがお客様に代わってモーターを選定します。
- 当社内製装置の仕様や外形寸法に関する資料をご用意しています。
詳細は電話、またはWEBからお問い合わせください。
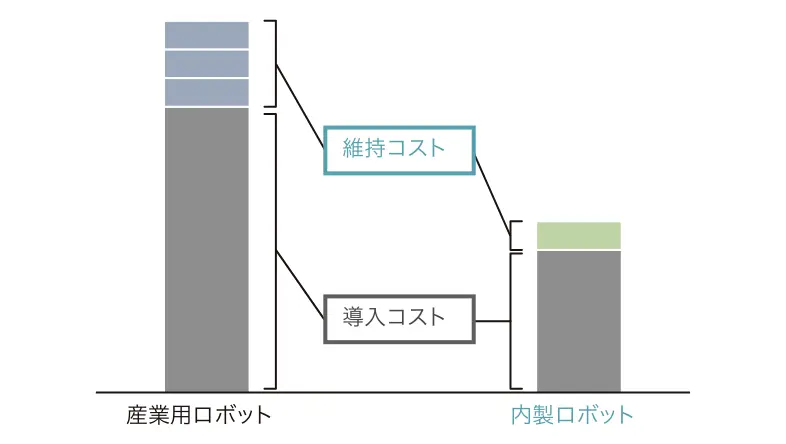
ロボットの内製化







ロボット本体やコントローラがなくてもオフラインでティーチング可能な MRC Studio Simulator
関連製品


関連コンテンツ

搬送ロボットへのソリューション提案
「低床・スリム設計」「高耐荷重性能」「停止位置の設定・微調整」「まっすぐ走る・避ける・止まる」ことを実現可能にする各種搬送装置をご紹介します。
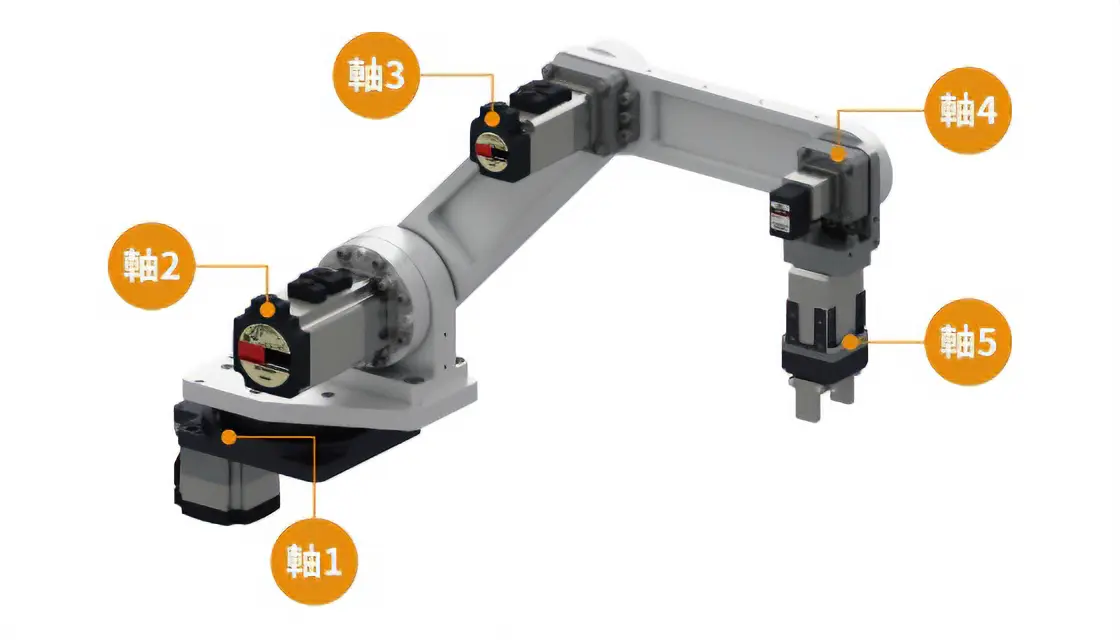
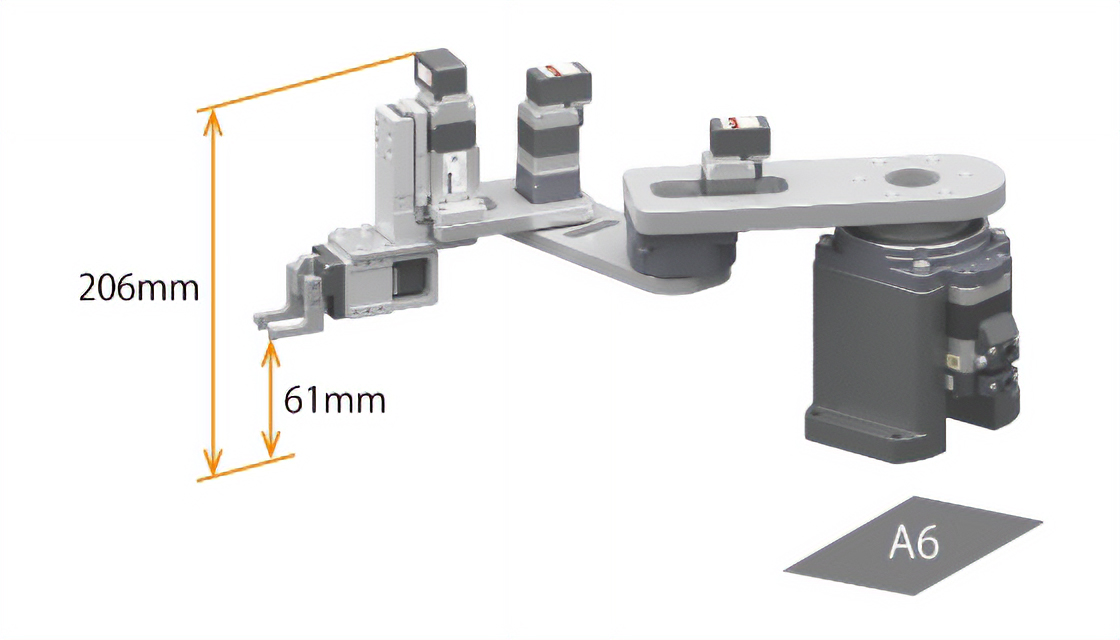
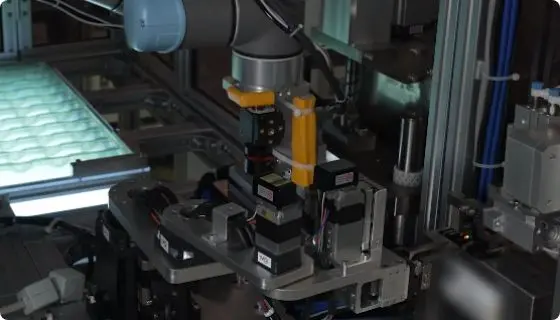
スカラロボット(水平多関節ロボット)
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。
ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。