close
※旧製品や代替品の検索・比較も可能です。
最近、人材不足などを背景に「人の作業を代替するロボット」のニーズが高まってますね。
そうね。必要な作業、動作に合ったロボットを求めて、購入するだけでなく、必要な用途に絞って自作したいという声もよく聞くようになったわね。WEBサイトでも、垂直多関節ロボットデモ機の動画を公開しているわ。
実は、ロボットを自作したお客様が「狙った位置決めができなくなる時がある」って悩んでいるんです。 ギヤードモーターを使っているようなんですけど…。
機構側に問題があるのかしら。ギヤの精度も気になるところね。学くん、バックラッシって覚えている?
うまく説明できる自信がないです。
じゃあ一緒に復習しましょう。お客様の問題解決のヒントになるかもしれないわ。
お願いします!
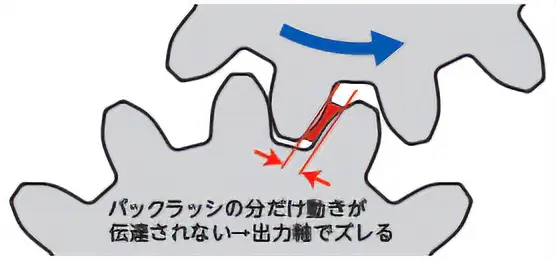
バックラッシは「歯車と歯車の間の設計上の隙間」のことよ。
隙間っていいイメージがないのですが、必要なんですか?
隙間は必要よ。歯車と歯車を隙間なく、強く押し付けた状態で組み付けると、負荷が高すぎて回らなくなってしまうわ。
だから適切な隙間を設計する必要があるんですね。
一方向運転の場合、同じ歯車と歯車が接し続けるから隙間は問題にはならないわ。ただ、ロボットのように往復運転する場合は、歯車と歯車の隙間分、狙った位置に届かなくなってしまうの。
なるほど。でも、ギヤの隙間なんて、装置全体から見たら小さいズレですよね。ロボットにどう影響してくるんですか?
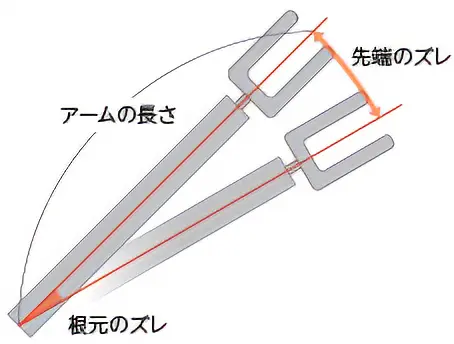
図2を見てみて。モーター近くと、アームの先端ではズレが大きく違っているのがわかるかしら。
本当ですね。三角形の相似の原理だ!
バックラッシがロボットの先端のズレに影響することがわかってもらえたようね。 特にロボットは、求める精度の要求が高いから、ギヤの歯車にテーパをつけたものや、2枚の歯車で両方向から挟み込む特殊な機構で隙間を極限までつめたもの(バックラッシレス)、歯車の形状そのものが隙間なく組み付けられるもの(ノンバックラッシ)が使われていることが多いわ。詳しくは、こちらを見てみてね。
はい!これで提案できそうです。
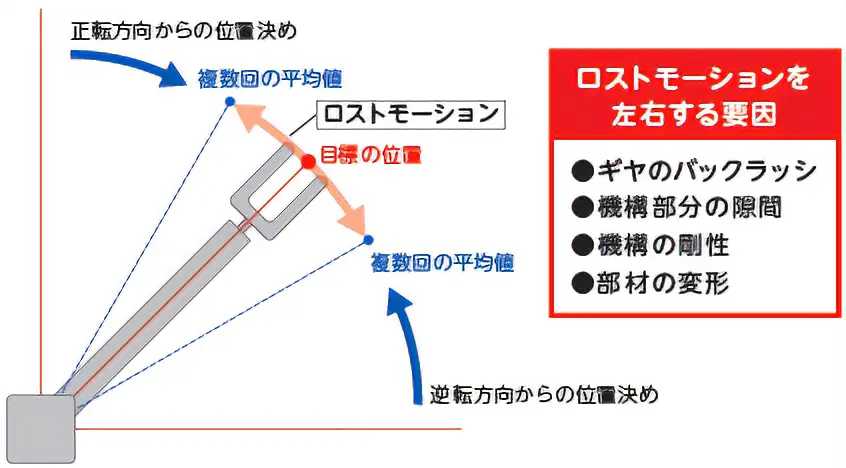
ちょっと待って。今回の問題では、ロストモーションについても復習しておく必要があるわ。
ロストモーションですか?
装置で「ある位置に対して、正転方向と逆転方向から位置決めしたときの最大差」を測定した値のことよ。JIS規格で決まっているから調べてみて。
バックラッシは設計するのに対して、ロストモーションは装置で測定するものなんですか?
今回のロボットのように、装置は、様々な機械要素で構成されているわ。そのすべての要素の影響を考慮しないといけないのよ。
なるほど。だから、測定が必要なんですね。
ロボットで狙った位置決めをするとなると、モーターだけじゃなくて構成要素一つ一つの精度も見直す必要があるのよ。
そうですね。少しでも影響を減らすために、ギヤを選ぶときには、なるべくバックラッシが小さいものを選ぶよう提案してみます!
それがいいわね。頑張って!
αSTEP
「おしえて!照代さん」では、皆様からのテーマを募集しています。 照代さんに解説してほしいテーマや、日頃感じているモーターに関する疑問などをお寄せください。
※いただいたご意見は、「おしえて!照代さん」のテーマとして取り上げる場合がございます。 ご記入いただいた内容への直接の返信はいたしかねますので、ご了承ください。