ネットワーク対応製品

ネットワーク通信による運転データ設定、都度データの書き換えが可能。 モーターの状態をデータで直接把握でき、開発工数の短縮や装置システムの省配線・信頼性・保守性の向上に貢献します。
ネットワーク対応製品
シリーズ一覧
ネットワーク対応製品








ネットワーク対応
各種FAネットワークに対応した製品をご用意しています

- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany. - ※ EtherNet/IP™はODVAの商標です。
- ※ PROFINETは、PROFIBUS Nutzerorganisation e.V.(PNO)の商標または登録商標です。
- ※ Modbusは、Schneider Automation Inc. の登録商標です。
- ※ CC-Link IEは、三菱電機株式会社の登録商標です。
- ※ Ethernetは、富士フィルムビジネスイノベーション株式会社の登録商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ SSCNETⅢ/Hは三菱電機株式会社の登録商標です。
- ※ CC-LinkはCC-Link協会の登録商標です。
- ※ CiA®、CANopen®はCAN in Automation e.V. の登録商標です。
シリーズが決まっていない方
セレクションガイド詳細へ
セレクションガイド
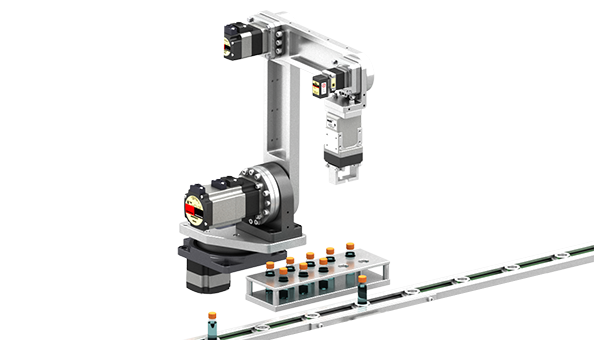
お客様の装置に最適な製品シリーズをご案内するセレクションガイドです。装置アプリケーション例を選び、ガイダンスに従い項目を選択することで、製品シリーズを選べます。
さらに詳しく
課題解決事例集詳細へ
課題解決事例集
お客様の装置課題に対するソリューション情報です。実際の製造現場で使われている装置の内製事例や、従来装置の課題を解決する当社おすすめの製品の活用事例をご紹介しています。
さらに詳しく
関連情報