ステッピングモーター
パルス信号に正確に同期し、高精度の位置制御が可能です。 高トルク・低振動で、短い距離の短時間位置決めに適しています。
ステッピングモーター
概要・関連情報
概要
正確な位置決め運転を簡単に実現できるのがステッピングモーターです。
パルス信号によって回転角度・回転速度を正確に制御できるモーターとして、さまざまな装置にご利用いただけます。
細かく、正確な位置決め
ステッピングモーターは時計の秒針のように、一定の角度ずつ回転するモーターです。この角度を基本ステップ角度と呼びます。当社では基本ステップ角度が0.72°の5相ステッピングモーターと、基本ステップ角度が1.8°の2相ステッピングモーターをご用意しています。
パルス信号で簡単に制御
高精度位置決めをおこなう場合のシステム構成は、下図のようになります。ステッピングモーターの回転角度と回転速度は、コントローラからのパルス信号で正確に制御できます。
システム構成
パルス信号とは
電源のON/OFFが繰り返される電気信号です。
ON/OFFの1サイクルを1パルスと数え、1パルスが入力されると1ステップ角度だけモーター出力軸が回転します。
回転角度はパルスの数に比例
ステッピングモーターの回転角度は、ドライバに入力するパルス信号の数(パルス数)に比例します。
ステッピングモーターの回転角度とパルス数の関係は、次のようになります。
θ = θS × A
- θ
- モーター出力軸の回転角度 [°]
- θS
- ステップ角度(分解能)[°/step]※
- A
- パルス数
回転速度はパルスの速度に比例
ステッピングモーターの回転速度は、ドライバに入力するパルス信号の速度(パルス周波数)に比例します。
パルス速度[Hz]と回転速度[r/min]の関係は、次のようになります。
N = θS/ 360 × f × 60
- N
- モーター出力軸の回転速度 [r/min]
- θS
- ステップ角度(分解能)[°/step]※
- f
- パルス速度 [Hz]
(1秒間に入力されるパルス数)
- ※ ギヤードモーターの場合、ギヤ出力軸上におけるステップ角度(分解能)になります
小型・高トルクです
ステッピングモーターは、小型で高トルクを発生します。
このため加速性・応答性に優れており、頻繁な起動・停止が必要な用途に威力を発揮します。
また、ギヤードモーターを使用することにより、さらに大きなトルクを得ることができます。
頻繁な起動・停止が可能です
回転速度-トルク特性(モーター取付角寸法60mmの場合)
停止位置を自己保持できます
ステッピングモーターは停止しているときにも保持力がありますので、機械的ブレーキに頼らなくても停止位置を保てます。
大慣性負荷の駆動ができます
ステッピングモーターは取付角寸法が同等のサーボモーターと比べ、より大きな慣性負荷を駆動することができます。
ローター慣性モーメントの30倍で比較
-
ステッピングモーター
慣性モーメント22.4×10-4kg・m2
(ローター慣性モーメントの30倍)- 慣性負荷
- 直径169mm、厚さ10mm、材質アルミニウム
- モーター
- 取付角寸法60mm
長さ90mm
-
従来品サーボモーター
慣性モーメント4.0×10-4kg・m2
(ローター慣性モーメントの30倍)- 慣性負荷
- 直径110mm、厚さ10mm、材質アルミニウム
- モーター
- 取付角寸法60mm
長さ96.5mm
用途例
X-Y軸のテーブル駆動
定量注入機の送り
ストッカの上下駆動
定量塗布
モーターの種類
ステッピングモーターの種類は、標準タイプを基本に、電磁ブレーキ付タイプや各種ギヤードタイプを取り揃えています。用途に必要な機能・性能に応じてお選びいただけます。以下に代表例をご紹介します。
標準タイプ
使いやすい基本モデルです。
さまざまなサイズのモーターを取り揃えています。
高トルクタイプ
ローターとステーターの小歯間に永久磁石を挿入することで、高トルク・高応答を実現しました。同等サイズの標準タイプに比べて、大幅なトルクアップを実現しています。

高分解能タイプ
モーターの基本分解能を標準タイプの2倍にした製品です。
高い位置決め精度と振動低減の効果が得られます。

エンコーダ付タイプ
現在位置モニタや位置ズレの検出などが可能です。
たとえば、現在位置と指令位置とを比較することで、モーターの正常動作を確認できます。
電磁ブレーキ付タイプ
無励磁作動型の電磁ブレーキを組み込んだ製品です。
停電のような不測の事態が発生したときに負荷を保持し、落下を防ぎます。
- モーターは給電が断たれると自己保持力はなくなり、上下駆動の場合や外力に対しては停止位置が保持できなくなります。昇降装置のような用途には電磁ブレーキ付タイプをご使用ください。
ギヤードタイプ
モーターの高い制御性を活かすため、バックラッシを抑えた位置制御専用のギヤヘッドを組み付けました。
大きな負荷トルクのかかる用途でも、高精度で滑らかな運転ができます。
ギヤードモーターのメリット
ステッピングモーターのバリエーションとして、ギヤを組み付けたギヤードモーターをご用意しています。ギヤードモーターを使用することで減速、高トルク、高分解能が得られるほかに、次のようなメリットがあります。
大慣性負荷を駆動することができます
ギヤードモーターを使用すると、標準モーターに比べ、回転できる慣性負荷モーメントは減速比の2乗に比例して大きくなります。そのため、大きな慣性負荷を駆動することができます。
|
|
|
| モータータイプ | ギヤードタイプ (減速比5) | 標準タイプ |
|---|---|---|
| 品名 | AZM66AC-PS5 | AZM66AC |
| 慣性負荷モーメント (ローター慣性モーメントの30倍) |
277.5×10-4kg・m2 | 11.1×10-4kg・m2 |
| 慣性負荷直径 (厚さ20mm、材質アルミニウム) |
317mm | 142mm |
| 速度範囲 | 0~600r/min | 0~6000r/min |
起動、停止時のダンピング特性が改善できます
慣性負荷が大きい場合や、加減速時間が短い場合は、標準モーターよりもギヤードモーターのほうが、ダンピングを抑えられ、安定して駆動できます。インデックステーブルやアーム駆動のような大慣性を短時間で位置決めするような用途に最適です。
小型化できます
励磁最大静止トルクが同等の標準モーターとギヤードモーターを比較した場合、ギヤードモーターの取付角寸法は小さくなるので、質量、容積を軽減することができます。装置の小型化、軽量化が要求される場合に有効です。
剛性が高くねじれに強い
ギヤードモーターは剛性が高いので、ねじれに強く、標準モーターに比べ負荷トルクの変動の影響を大きく受けません。そのため、負荷の大きさが変化しても安定した高精度位置決めができます。
-
用途例 : リフター
リフターのような上下駆動する機構で、ワーク数量や重量が変化するような場合でも、高精度で停止することができます。
-
用途例 : 監視カメラ
強い風が吹いて、カメラが揺らされるような場合でも、安定した位置で保持できます。
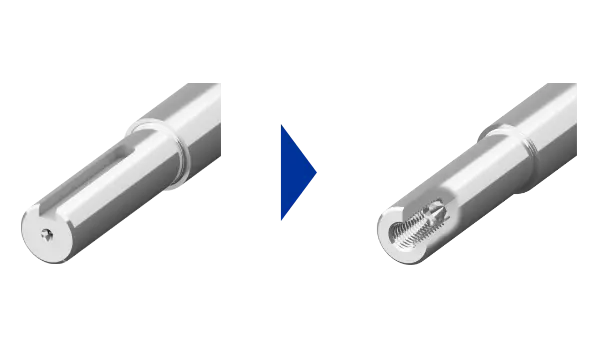
負荷の面取り付けが可能(ハーモニックギヤードタイプ、HPGギヤードタイプ)
ハーモニックギヤードタイプ(取付角寸法90mmを除く)とHPGギヤードタイプは、シャフトと一体になった回転面に直接負荷を取り付けることができます。
外観と取付例
用途例 : インデックステーブル
部品・工程削減に貢献すると共に、信頼性が向上します。また、モーメント荷重がかかる負荷の運転に適しています。
ギヤードモーターの種類と特徴
ステッピングモーターには各種ギヤードモーターをご用意しています。
トルク、精度(バックラッシ)などから最適なタイプを選択いただけます。
各タイプの特徴と主な仕様は右図をクリックしてご確認ください。
- 各タイプの違いを把握するための参考としてご覧ください。
- 該当するギヤードモーターは、シリーズごとに異なります。

| ギヤの種類 | 平行軸 | 直交軸 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SH (平歯車 機構) |
CS (平歯車 機構) |
TH (平歯車 機構) |
TS (平歯車 機構) |
PS (遊星歯車 機構) |
PN (遊星歯車 機構) |
HPG (ハーモニックプラネタリ® |
ハーモニック (ハーモニック ドライブ® |
FC (フェースギヤ機構) |
|||
| 外観 |
|

|

|

|

|

|

|

|

|

|
|
| 特徴 | |||||||||||
| 精度 | 2相用 | バックラッシレス | ノンバックラッシ | バックラッシレス | |||||||
| ★ | ★ | ★★ | ★★ | ★★ | ★★★ | ★★★ | ★★★ | ★★ | |||
| 高トルク | ★ | ★★ | ★ | ★★ | ★★ | ★★ | ★★ | ★★ | ★★ | ||
| 瞬時最大トルク使用可能 | - | - | - | ○ | ○ | ○ | ○ | ○ | - | ||
| 負荷面取付 | - | - | - | - | - | - | - | ○ | ○ | - | |
| センターシャフト | - | ○ | - | - | ○ | ○ | ○ | - | ○ | ○ | |
| 主な仕様 | |||||||||||
| 減速比の種類 | 3.6、7.2、9、10、18、36 | 5、10、15、20 | 3.6、7.2、10、20、30 | 3.6、7.2、10、20、30 | 5、7.2、10、25、36、50 | 5、7.2、10、25、36、50 | 5、15 | 50、100 | 7.2、10、20、30 | ||
| 速度範囲[r/min] | ~833 | ~600 | ~500 | ~833 | ~600 | ~600 | ~900 | ~70 | ~416 | ||
| 許容トルク[N・m] | ~4 | ~4.5 | ~4 | ~6 | ~8 | ~8 | ~9 | ~10 | ~10.5 | ||
| 瞬時最大トルク[N・m] | - | - | - | ~10 | ~20 | ~20 | ~19 | ~36 | - | ||
| バックラッシ[arcmin] | 45~70 | 45~70 | 10~35 | 10~35 | 7~9 | 2~3 | 3 | 0 | 10~15 | ||
| ギヤの種類 | SH | CS | TH | TS | PS | PN | HPG | ハーモニック | FC | ||
- ※ 上記の値は各タイプの違いを把握するための参考としてご覧ください。取付角寸法、減速比によって変わります。
- ※ 主な仕様の値は取付角寸法60mmでの値です。
- ※ ハーモニックプラネタリ®、ハーモニックドライブ®および
 は、株式会社ハーモニック・ドライブ・システムズの登録商標または商標です。
は、株式会社ハーモニック・ドライブ・システムズの登録商標または商標です。
-
各タイプの原理と構造については、技術資料をご覧ください。
ステッピングモーター、サーボモーター用ギヤ
ドライバの種類
位置決め機能内蔵タイプ
運転データをドライバに設定し、上位から運転データの選択、実行をするタイプです。上位との接続、制御はI/O、Modbus(RTU) / RS-485通信、FAネットワークのいずれかでおこなえます。ネットワークコンバータ(別売)を使用することにより、CC-Link通信やMECHATROLINK通信、EtherCAT通信で制御できます。
- FLEX(フレックス)とは、I/O制御、Modbus(RTU)制御、ネットワークコンバータ経由でのFAネットワーク制御に対応した製品の総称です。
RS-485通信付きパルス列入力タイプ (AZシリーズのみ)
ドライバに対してパルスを入力することで運転を実行するタイプです。お客様がご用意する位置決めユニット(パルス発振器)からモーターの制御をおこないます。RS-485通信を使用することで、モーターのステータス情報(位置、速度、トルク、アラーム、温度など)をモニタすることができます。

パルス列入力タイプ
ドライバに対してパルスを入力することで運転を実行するタイプです。お客様がご用意する位置決めユニット(パルス発振器)からモーターのコントロールをおこないます。サポートソフト(MEXE02)を使用することで、アラーム履歴の確認や各種状態のモニタができます。

ネットワーク対応ドライバ(AZシリーズのみ)
EtherNet/IP、EtherCAT通信に対応したドライバです。ネットワーク上からの直接制御が可能です。上位制御機器とドライバを通信ケーブル1本で接続するため、省配線を実現します。
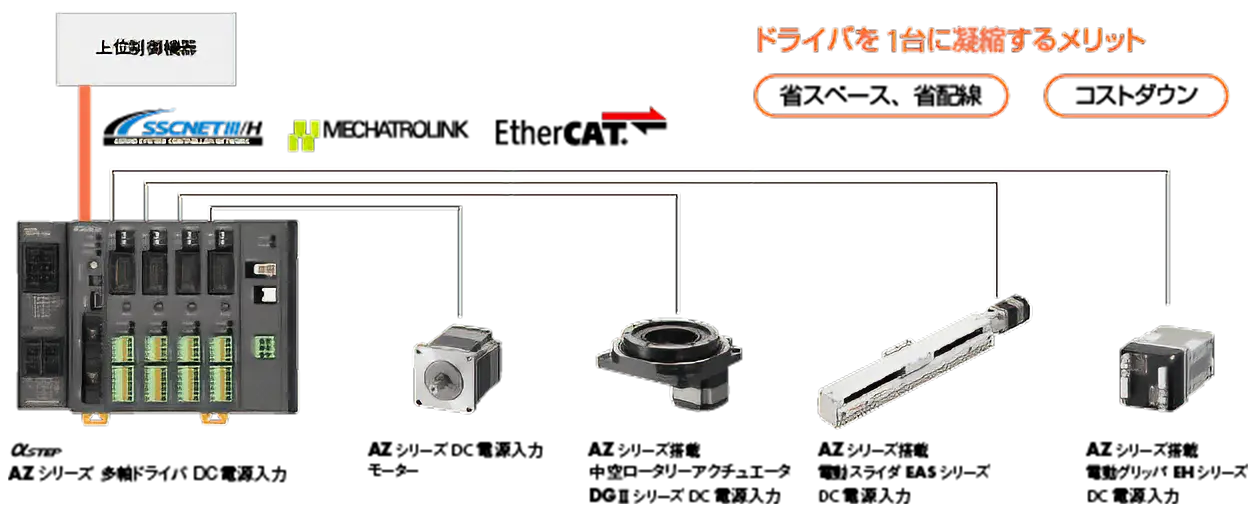
多軸ドライバ(AZシリーズ DC電源入力のみ)
SSCNETⅢ/H、MECHATROLINK-Ⅲ、EtherCATに対応した多軸ドライバです。
AZシリーズ DC電源入力のモーターと、それらを搭載している電動アクチュエータを接続できます。
2軸、3軸、4軸接続できるドライバをご用意しています。
- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ EtherNet/IP™はODVAの商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ SSCNETⅢ/Hは三菱電機株式会社の登録商標です。
- ※ CC-LinkはCC-Link協会の登録商標です。
- ※ Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
- ※ サポートソフト MEXE02は、こちらからダウンロードしていただけます。
関連情報
シリーズが決まっていない方
セレクションガイド
お客様の装置に最適な製品シリーズをご案内するセレクションガイドです。装置アプリケーション例を選び、ガイダンスに従い項目を選択することで、製品シリーズを選べます。
さらに詳しく
課題解決事例集
お客様の装置課題に対するソリューション情報です。実際の製造現場で使われている装置の内製事例や、従来装置の課題を解決する当社おすすめの製品の活用事例をご紹介しています。
さらに詳しく
関連情報