ブラシレスモーター BXIIシリーズ
BXM460M-GFS+GFS4G50+BXSD60-A2



| 製品種別 | 品名 | 定価(WEBショップ価格) | 出荷日 |
|---|---|---|---|
| モーター | BXM460M-GFS | 46,600円(39,610円) | 5日(数量:1~5) |
| ギヤヘッド | GFS4G50 | 12,200円(10,370円) | 5日(数量:1~5) |
| 回路 | BXSD60-A2 | 34,700円(29,490円) | 5日(数量:1~5) |
ドライバに接続する場合は、接続ケーブルまたは可動接続ケーブルをお使いください。
• 出荷日は、15時までにご注文された場合です。詳細はこちら
付属品
- モーター:なし
ギヤヘッド:取付用ねじ、平行キー
回路:CN1用コネクタ、CN5用コネクタ、CN7用コネクタ、回路用取付金具(ねじ付)
仕様
特性
外形図
データダウンロード
その他仕様
共通仕様
| 項目 | 速度制御モード | 位置制御モード |
|---|---|---|
| 入力信号 | フォトカプラ入力方式 入力抵抗:6.6kΩ 内部電源により動作:DC5V 接続可能な外部電源:DC24V −15~+20% 100mA以上 シンク入力/ソース入力 外部配線にて対応 |
|
| IN0~IN8入力(9点)へ任意に信号割付可能 [ ]:初期設定 [FWD]、[RVS]、[M0]、[M1]、[M2]、M3、[FREE]、 [STOP]、[ALM-RST]、TH、TL、S-ON、HMI、[未使用] |
IN0~IN8入力(9点)へ任意に信号割付可能 [ ]:初期設定 [START]、[M0]、[M1]、[M2]、M3、[FREE]、 [STOP]、[ALM-RST]、[HOME]、[HOMES]、TH、SSTART、MS0、MS1、 MS2、MS3、MS4、MS5、FWD、RVS、+JOG、−JOG、S-ON、 P-PRESET、TL、HMI、未使用 |
|
| 出力信号 | フォトカプラ・オープンコレクタ出力 外部電源:DC4.5~30V 100mA以下 シンク出力/ソース出力 外部配線にて対応 |
|
| OUT0~OUT2出力(3点)へ任意に信号割付可能 [ ]:初期設定 [ALM]、[WNG]、[MOVE]、END、TLC、VA、ZSG |
OUT0~OUT2出力(3点)へ任意に信号割付可能 [ ]:初期設定 [ALM]、WNG、MOVE、[READY]、[HOME-P]、END、TLC、VA、ZSG |
|
| トランジスタ・オープンコレクタ出力 外部電源:DC4.5~30V 20mA以下 |
||
| ASG、BSG 500パルス/1回転 | ||
| 保護機能 | 次の保護機能が動作したときにALM出力をOFFにし、モーターが停止します。 同時にアラームコードが操作パネルに表示されます。 位置偏差過大※、過電流、過電圧、不足電圧、センサ異常、主回路出力異常、過負荷、過速度、EEPROM異常、 初期時センサ異常、初期時運転禁止、回生抵抗過熱、ソフトウェアオーバートラベル※、運転データ異常※ |
|
| 最大延長距離 | モーター・ドライバ間 30.7m(別売りの接続ケーブル使用時) | |
| 時間定格 | 連続 | |
- ※ 位置制御モードの場合のみ
一般仕様
| 項目 | モーター部 | ドライバ部 | |
|---|---|---|---|
| 絶縁抵抗 | 常温常湿において連続運転後、 コイルとケース間をDC500Vメガーで測定した値が100MΩ以上あります。 (エンコーダを除く) |
常温常湿において連続運転後、 電源端子と保護接地端子間、 電源端子と入出力信号端子間をDC500Vメガーで測定した値が100MΩ以上あります。 |
|
| 絶縁耐圧 | 常温常湿において連続運転後、 コイルとケース間に50Hz、 AC1.5kVを1分間印加しても異常を認めません。 (エンコーダを除く) |
常温常湿において連続運転後、 電源端子と保護接地端子間に50Hz、AC1.5kV、 電源端子と入出力信号端子間に50Hz、 AC1.5kVを1分間印加しても異常を認めません。 |
|
| 温度上昇 | 常温常湿において定格連続運転後、 熱電対法でコイルの温度上昇を測定した値が50℃以下、 ケース表面の温度上昇を測定した値が40℃以下※1です。 |
常温常湿において定格連続運転後、 熱電対法で放熱板の温度上昇を測定した値が50℃以下です。 (200W、400W タイプの密着取付時は60℃ 以下) |
|
| 使用環境※2 | 周囲温度 | 0~+50℃(凍結のないこと) | 0~+50℃(凍結のないこと)※2
200W、400Wタイプの密着取付時は0~+40℃ |
| 周囲湿度 | 85%以下(結露のないこと) | ||
| 標高 | 海抜1000m以下 | ||
| 雰囲気 | 腐食性ガス、塵埃のないこと。放射性物質、磁場、 真空などの特殊環境での使用は不可。 |
||
| 振動 | 連続的な振動や過度の衝撃が加わらないこと JIS C60068-2-6 正弦波振動試験方法に準拠 周波数範囲:10~55Hz、片振幅:0.15mm 掃引方向:3方向(X、Y、Z) 掃引回数:20回 |
||
| 保存環境※3 | 周囲温度 | −20~+60℃(凍結のないこと) | −25~+70℃(凍結のないこと) |
| 周囲湿度 | 85%以下(結露のないこと) | ||
| 標高 | 海抜3000m以下 | ||
| 雰囲気 | 腐食性ガス、塵埃のないこと。水、油がかからないこと。放射性物質、磁場、真空などの特殊環境は不可。 | ||
| 耐熱クラス | UL/CSA規格:105(A)、EN規格:120(E) | − | |
| 保護等級 | IP54(丸シャフトタイプの取付面、コネクタ部を除く) | IP20 | |
- ※1
- 丸シャフトタイプは、モーターケース表面温度が90℃以下になるように、以下のサイズの放熱板(材質:アルミニウム)に取り付けてください。
30Wタイプ:115×115mm 厚さ5mm、60Wタイプ:135×135mm 厚さ5mm、120Wタイプ:165×165mm 厚さ5mm
200Wタイプ:200×200mm 厚さ5mm、400Wタイプ:250×250mm 厚さ6mm - ※2
- ドライバは、アルミ製金属板と同等の放熱能力を持つ場所に取り付けてください。
単体取付:200×200mm 厚さ2mm
密着取付:350×350mm 厚さ2mm
200W、400Wタイプの場合:ドライバ取付金具、DINレール取付金具(別売)使用時は負荷率90%以下。 - ※3
- 保存環境は、輸送中を含めた短期間の値です。
ご注意
- モーターとドライバを接続した状態では、絶縁抵抗測定、耐圧試験をおこなわないでください。
速度制御モード仕様
| 項目 | デジタル設定 | アナログ設定 |
|---|---|---|
| 速度制御範囲 | 2~4000r/min(1r/min単位で設定) | 30~4000r/min |
| 速度設定方法 |
次のいずれかの方法で設定します。
|
次のいずれかの方法で設定します。 運転データNo.0:
内部速度設定器(SPEED)
運転データNo.1:
|
| 加減速時間 | 0.000~30.00s (定格回転速度、無負荷時) |
0.1~30s (定格回転速度、無負荷時) |
| 加減速時間 設定方法 |
次のいずれかの方法で設定します。(個別設定)
|
加速時間・減速時間は運転データNo.0、No.1に共通
|
| トルク制限設定範囲 | 0~250% | |
| トルク制限設定方法 |
次のいずれかの方法で設定します。
|
次のいずれかの方法で設定します。
|
| 運転データ設定数 | 16点 | |
| モーター停止時動作 | モーター停止時の動作を選択可能 ・モーター無励磁(初期設定)/・サーボロック停止(モーター励磁) |
|
| その他の運転 | JOG運転、テスト運転、ティーチング(MEXE02 ※1は除く) | |
- ※1
- サポートソフトMEXE02はWEBサイトからダウンロードできます。MEXE02をご使用になる場合は、サポートソフト用通信ケーブルCC05IF-USB(別売)が必要です。
- ※2
- 最大電圧はパラメータで任意に変更可能です。例 : DC0~5V
位置制御モード仕様
| 項目 | デジタル設定 | |
|---|---|---|
| 位置決め 運転 |
移動量設定範囲 | −8,388,608~+8,388,607step |
| 分解能 | 0.72°(500ステップ/1回転) | |
| 速度設定範囲 | 2~4000r/min(1r/min単位で設定) | |
| 運転方式 | インクリメンタルまたは、アブソリュート | |
| 運転機能 | 単独、連結、連結2、順送り、ダイレクト | |
| 加減速時間 | 0.000~30.00s (定格回転速度、無負荷時) |
|
| トルク制限 | 0~250% | |
| 運転データ設定数 | 16点 | |
| 運転データ設定方法 | 次のいずれかで設定します。 ・操作パネル ・MEXE02 ※ ・OPX-2A(別売) (トルク制限のみ外部アナログ設定も行なえます) |
|
| その他の運転 | 連続運転、JOG運転、原点復帰運転、テスト運転、ティーチング | |
- ※ サポートソフトMEXE02はWEBサイトからダウンロードできます。MEXE02をご使用になる場合は、サポートソフト用通信ケーブルCC05IF-USB(別売)が必要です。
トルク制限機能
速度制御モードおよび位置制御モードでモーターの出力トルクに制限を設定することができます。
| 項目 | 仕様 |
|---|---|
| トルク制限指令 |
次のいずれか1つによります。
全てのデータに対して同一のトルク制限値を設定します。 |
| トルク制限範囲※2 |
モーターの定格トルク値を100%としたとき、次の範囲でトルク制限値を設定します。
|
- ※1
- 最大電圧はパラメータで任意に変更可能です。例 : DC0~5V
- ※2
- 瞬時最大トルクを超える負荷を加えないでください。
ご注意
- 設定速度や電源電圧、モーターケーブル延長距離により、設定値と発生トルクの誤差が最大±10%程度(定格トルク、定格回転速度時)生じます。
許容ラジアル荷重・許容アキシアル荷重
平行軸ギヤヘッド
| モーター品名 | 減速比 | 許容ラジアル荷重 | 許容アキシアル荷重 N |
||
|---|---|---|---|---|---|
| 出力軸先端から10mm N |
出力軸先端から20mm N |
||||
| BXM230 | 5 | 2~3000r/min 時 | 100 | 150 | 40 |
| 4000r/min 時 | 90 | 110 | |||
| 10、15、20 | 2~3000r/min 時 | 150 | 200 | ||
| 4000r/min 時 | 130 | 170 | |||
| 30、50、100、200 | 2~3000r/min 時 | 200 | 300 | ||
| 4000r/min 時 | 180 | 230 | |||
| BXM460 | 5 | 2~3000r/min 時 | 200 | 250 | 100 |
| 4000r/min 時 | 180 | 220 | |||
| 10、15、20 | 2~3000r/min 時 | 300 | 350 | ||
| 4000r/min 時 | 270 | 330 | |||
| 30、50、100、200 | 2~3000r/min 時 | 450 | 550 | ||
| 4000r/min 時 | 420 | 500 | |||
| BXM5120 | 5 | 2~3000r/min 時 | 300 | 400 | 150 |
| 4000r/min 時 | 230 | 300 | |||
| 10、15、20 | 2~3000r/min 時 | 400 | 500 | ||
| 4000r/min 時 | 370 | 430 | |||
| 30、50、100、200 | 2~3000r/min 時 | 500 | 650 | ||
| 4000r/min 時 | 450 | 550 | |||
| BXM6200 BXM6400 |
5、10、15、20 | 2~3000r/min 時 | 550 | 800 | 200 |
| 4000r/min 時 | 500 | 700 | |||
| 30、50 | 2~3000r/min 時 | 1000 | 1250 | 300 | |
| 4000r/min 時 | 900 | 1100 | |||
| 100、200 | 2~3000r/min 時 | 1400 | 1700 | 400 | |
| 4000r/min 時 | 1200 | 1400 | |||
荷重位置について
中空軸フラットギヤヘッド
| モーター品名 | 減速比 | 許容ラジアル荷重 | 許容アキシアル荷重 N |
||
|---|---|---|---|---|---|
| ギヤヘッド取付面から 10mm N |
ギヤヘッド取付面から 20mm N |
||||
| BXM230 | 5、10 | 2~3000r/min 時 | 450 | 370 | 200 |
| 4000r/min 時 | 410 | 330 | |||
| 15、 20、 30、50、100、200 | 2~3000r/min 時 | 500 | 400 | ||
| 4000r/min 時 | 460 | 370 | |||
| BXM460 | 5、10 | 2~3000r/min 時 | 800 | 660 | 400 |
| 4000r/min 時 | 730 | 600 | |||
| 15、20、30、50、100、200 | 2~3000r/min 時 | 1200 | 1000 | ||
| 4000r/min 時 | 1100 | 910 | |||
| BXM5120 | 5、10 | 2~3000r/min 時 | 900 | 770 | 500 |
| 4000r/min 時 | 820 | 700 | |||
| 15、20 | 2~3000r/min 時 | 1300 | 1110 | ||
| 4000r/min 時 | 1200 | 1020 | |||
| 30、50、100、200 | 2~3000r/min 時 | 1500 | 1280 | ||
| 4000r/min 時 | 1400 | 1200 | |||
| BXM6200 BXM6400 |
5※、10 | 2~3000r/min 時 | 1230 | 1070 | 800 |
| 4000r/min 時 | 1130 | 990 | |||
| 15、20 | 2~3000r/min 時 | 1680 | 1470 | ||
| 4000r/min 時 | 1550 | 1360 | |||
| 30、50、100 | 2~3000r/min 時 | 2040 | 1780 | ||
| 4000r/min 時 | 1900 | 1660 | |||
- ※ 400Wタイプのみ
回転方向
荷重位置について
丸シャフトタイプ
| モーター品名 | 許容ラジアル荷重 | 許容アキシアル荷重 N |
|
|---|---|---|---|
| 出力軸先端から 10mm N |
出力軸先端から 20mm N |
||
| BXM230 | 87.2 | 107 | 10 |
| BXM460 | 117 | 137 | 20 |
| BXM5120 | 156 | 176 | 25 |
| BXM6200 BXM6400 |
197 | 221 | 25 |
上下駆動(巻き下げ運転)について
BXⅡシリーズは、巻き下げ運転のときでも安定したスピードコン トロールができます。
下図のような上下駆動(巻き下げ運転)時には、通常、モーターが外力によって回され、発電機として作用します。そのエネルギーがドライバに加わると異常を起こします。
別売りの回生抵抗を使用することにより、回生エネルギーを熱エネルギーとして放出することができます。上下駆動や大慣性の急制動をさせる場合には、回生抵抗をご使用ください。
| 回生抵抗品名 | 適用製品 | 連続回生電力 | 瞬時回生電力 |
|---|---|---|---|
| EPRC-400P | BXSD30-A2、BXSD30-C2 | 100W | 240W |
| BXSD60-A2、BXSD60-C2 | |||
| BXSD120-A2、BXSD120-C2 | |||
| RGB100 | BXSD200-A2、BXSD200-C2 | 100W | 800W |
| BXSD400-A2 |
- 放熱板(材質:アルミニウム350×350mm 厚さ3mm)と同等の放熱能力を持つ場所に取り付けてください。
回生電力について
回生電力は次の式で概算できますので、目安にしてください。
回生電力(W)=0.1047×TL[N·m]×N[r/min]
TL:負荷トルク N:回転速度
巻き下げ運転能力
- 連続回生領域を超える連続巻き下げ運転をおこなうと、回生抵抗に内蔵のサーモスタット(150℃)がはたらきます。
- 巻き下げ運転には、電磁ブレーキ付タイプをお使いください。
システム構成
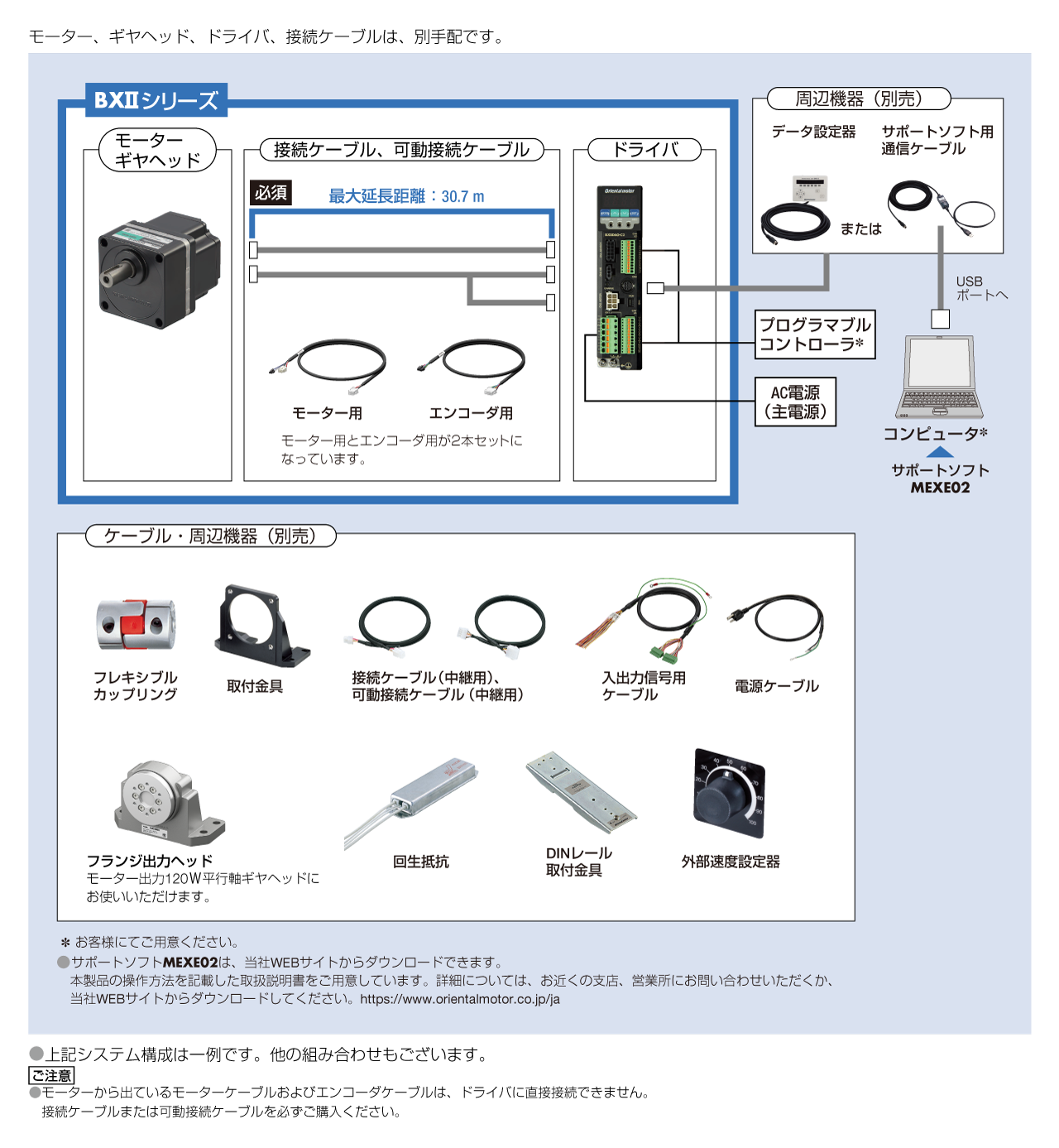
ケーブル・周辺機器
BXM460M-GFS+GFS4G50+BXSD60-A2
と選択した周辺機器を
品名欄にチェックを入れて「ショップで見積・購入」への追加ができます。
この製品と周辺機器を
close
close
close

close
close
close
close
close
close