電動スライダ EASシリーズ
EAS6NY-D005-AZAK-1


アクチュエータ/回路
この製品は現在販売のご案内を終了しています
| 製品種別 | 品名 | 定価(WEBショップ価格) | 出荷日 |
|---|---|---|---|
| アクチュエータ/回路 | EAS6NY-D005-AZAK-1 | 108,100円(91,880円) | 生産終了品(2023年3月31日 生産終了) |
付属品
- アクチュエータ、回路、モーター用ケーブル(1m)、エンコーダ用ケーブル(1m)、主電源・電磁ブレーキ接続用コネクタ(CN1)、入出力信号用コネクタ(CN4)
仕様
特性
データダウンロード
その他仕様
モーター部一般仕様
| 項目 | AC電源入力 | DC電源入力 | |
|---|---|---|---|
| 耐熱クラス | 130(B) [UL/CSAは105(A)で認証されています。] |
||
| 絶縁抵抗 |
以下の通りに DC500Vメガーにて測定した値が100MΩ以上あります。
|
||
| 絶縁耐圧 |
以下の通りに1分間印加しても異常を認めません。 EASM4、EACM4、EASM6、EACM6
|
以下の通りに1分間印加しても異常を認めません。 EASM2、EACM2
|
|
| 使用環境 (動作時) |
周囲温度 | 0~+40℃(凍結のないこと)※3 | |
| 周囲湿度 | 85%以下(結露のないこと) | ||
| 雰囲気 | 腐食性ガス・塵埃のないこと。水・油などが直接かからないこと。 | ||
| 保護等級※2 |
EASM2、EACM2:IP40(取付面とコネクタ部を除く) EASM4、EACM4、EASM6、EACM6: IP66((取付面とコネクタ部を除く) |
||
| 非通電状態での 多回転検出範囲 |
EASM2、EACM2:±450回転(900回転) EASM4、EACM4、EASM6、EACM6:±900回転(1800回転) |
||
- ※1
- 電磁ブレーキ付のみ
- ※2
- モーター部のみ。電動スライダ、電動シリンダの保護等級はIP00です。
- ※3
- 当社測定条件による。
ご注意
- 絶縁抵抗測定、絶縁耐圧試験を行うときは、モーターとドライバを切り離してください。
また、モーターのABZOセンサ部は、これらの試験を行わないでください。
ドライバ回路部仕様
| 分類 | 名称 | 位置決め機能 内蔵タイプ |
パルス列 入力タイプ |
|
|---|---|---|---|---|
| 入出力 機能 |
パルス列入力 | − | 最大入力パルス周波数: 上位コントローラがラインドライバ出力:1MHz(Duty 50%時) 上位コントローラがオープンコレクタ出力:250kHz(Duty 50%時) 負論理パルス入力(初期値) |
|
| ダイレクト入力 | 入力点数:10点 | 入力点数:6点 | ||
| ダイレクト出力 | 出力点数:6点 | |||
| RS-485通信 | ネットワーク 入力 |
16点 | − | |
| ネットワーク 出力 |
16点 | − | ||
ドライバ回路部一般仕様
| 位置決め機能内蔵タイプ | パルス列入力タイプ | ||
|---|---|---|---|
| 絶縁抵抗 |
以下の通りにDC500Vメガーにて測定した値が100MΩ以上あります。
|
||
| 絶縁耐圧 | - | ||
| 使用環境 (動作時) |
周囲温度 | 0~+50℃(凍結のないこと) | |
| 周囲湿度 | 85%以下(結露のないこと) | ||
| 雰囲気 | 腐食性ガス・塵埃のないこと。水、油などが直接かからないこと。 | ||
| 保護等級 | IP10 | ||
| 非通電状態での 多回転検出範囲 |
±900回転(1800回転)※ | ||
- ※ EAS2、EAC2は±450回転(900回転)
ご注意
- 絶縁抵抗測定、絶縁耐圧試験をおこなうときは、モーターとドライバを切り離してください。
移動方向
出荷時、テーブルの移動方向は次のように設定されています。
負荷モーメントの計算について
電動スライダおよび電動シリンダ(シャフトガイド付のみ)でワークを搬送する場合、テーブル中心/シャフトガイド中心よりワークの重心の位置がオフセットしているとリニアガイド/シャフトガイドに負荷モーメントが作用します。 作用方向はオフセットの位置によりピッチング(MP)、ヨーイング(MY)、ローリング(MR)方向に作用します。
選定した電動アクチュエータが搬送質量、位置決め時間を満足していても、ワークの重心の位置がテーブル中心/シャフトガイド中心から張り出している場合、負荷モーメントによって走行寿命が低下することがあります。負荷モーメントの計算をおこない、条件が仕様値内に入っていることを確認する必要があります。 静止状態で作用するモーメントは静的許容モーメント、動作中に作用するモーメントは動的許容モーメントで確認してください。
ワークや荷重の掛け方から、電動スライダおよび電動シリンダ(シャフトガイド付のみ)にかかる負荷モーメントを求め、静的許容モーメントおよび動的許容モーメントを超えないことを確認し強度が充分なことを確認します。
- ※ 静的許容モーメントおよび動的許容モーメントの計算については、こちらをご参照ください。
負荷モーメント判定式
\(\begin{align}\frac{|\Delta \mathrm{M_P}|}{\mathrm{M_P}}+\frac{|\Delta \mathrm{M_Y}|}{\mathrm{M_Y}}+ \frac{|\Delta \mathrm{M_R}|}{\mathrm{M_R}}\leqq 1 \end{align}\)
張り出すワークなどが複数ある場合は各ワークからモーメントの和で判定します。
ワークが複数(n個)の時
\(\begin{align}\frac{|\Delta \mathrm{M_{P1}} + \Delta \mathrm{M_{P2}} + \cdots \Delta \mathrm{M_{Pn}}|}{\mathrm{M_P}} + \frac{|\Delta \mathrm{M_{Y1}} + \Delta \mathrm{M_{Y2}} + \cdots \Delta \mathrm{M_{Yn}}|}{\mathrm{M_Y}} + \frac{|\Delta \mathrm{M_{R1}} + \Delta \mathrm{M_{R2}} + \cdots \Delta \mathrm{M_{Rn}}|}{\mathrm{M_R}} \leqq 1
\end{align}\)
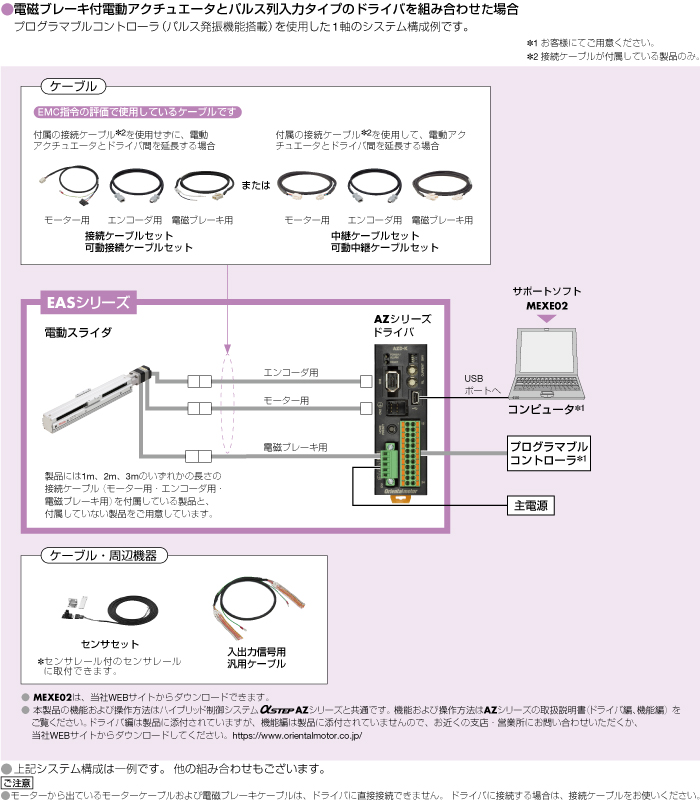
システム構成
ケーブル・周辺機器
品名欄にチェックを入れて「ショップで見積・購入」への追加ができます。
close
close
close
close
close
close