ブラシレスモーター
BLVシリーズ Rタイプ

- バッテリ駆動が可能な小型ドライバ
- 小型・高出力でAGV/AMRに最適なモーター
- Modbus通信、CANopen通信に対応
- 出力 60~750 W
- 速度制御範囲 1~4000 r/min
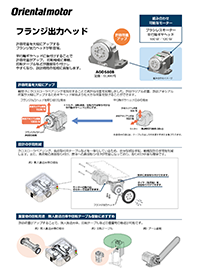
750 Wタイプを追加しました。
200 W、400 W、750 Wに丸シャフトタイプキー付を用意しました。
特徴 | ブラシレスモーター BLVシリーズ Rタイプ
バッテリ駆動に対応したAGV・AMRに最適なモーター
2分でわかるBLVシリーズ Rタイプ
BLVシリーズRタイプはコンパクト設計を実現し、滑らかな駆動や位置決め運転が可能です。
その特徴を実際の動作シーンを交えた動画でご覧いただけます。
- 出力 : 60 W、100 W、200 W、400 W、750 W
- 小型・軽量ドライバ
- 電源入力 : DC24~48V
- 電磁ブレーキ付も用意
- 定価 :70,100円※~
- ※ モーター(丸シャフト 60 W)、ドライバ、接続ケーブル、電源ケーブルを合わせた価格
小型・軽量化で搬送効率を向上
モーター、ドライバともに大幅な小型・軽量化を実現しました。AGVやAMRの可搬重量への影響を最小限に抑えながら、より重量のあるワーク搬送を可能にします。さらに、省スペース設計により、搬送システムの生産性向上に貢献します。


搬送用ロボット(AGV・AMR)で重量物の自動化搬送を実現
750 Wモーターなら、1~3 tクラスの重量物も搬送可能
搬送用ロボットの装置設計例
条件
| BLVシリーズ Rタイプ モーター |
種類 | 中空軸フラットギヤヘッド |
|---|---|---|
| 出力 | 750 W | |
| 減速比 | 50 | |
| 駆動条件 | 車輪直径 | 250 mm |
| 転がり摩擦係数 | 0.03 | |
| 加速時間 | 3 秒 |
結果
| 1輪当たりの可搬質量 (可搬質量は自重を含む値) |
750 kg (安全率1.5倍) |
|---|---|
| 最高移動速度 | 1 m/sec |

1輪あたりの可搬質量750 kg
2輪の場合1.5 t
4輪の場合 3 t
1輪あたりの可搬質量(参考値)
| 出力 | 400 W | 200 W | 100 W | 60 W |
|---|---|---|---|---|
| 可搬質量※ | 420 kg | 190 kg | 130 kg | 50 kg |
- ※ 安全率を1.5倍にした場合
幅広い速度制御範囲、高い速度安定性
1~4000r/minの幅広い速度制御範囲
1r/minからの低速域も安定した運転で、より滑らかな起動・停止を実現します。

メリット
- 低速時のカーブ走行や人の近くでも、滑らかで安定した運転が可能になります。
設定通りの速度で動作する高い速度安定性
速度変動率(対負荷)が±0.01%と小さく、負荷の大きさが変わっても設定した速度で運転できます。

- ※ デジタル設定時は、±0.2%です
現在位置の取得、位置決め運転が可能
モーターのフィードバック情報が充実したため、現在位置の取得が可能です。
また、分解能の向上により、狙った位置に停止することができます。
例えば、充電スポットなどへの位置決め運転が可能になります。

- 位置決め運転時の停止精度は、モーター軸上で±0.72°、ギヤヘッド出力軸上では1~2°程度です。
用途に合わせて選べるギヤヘッド、車輪機構、制御機器
各種ギヤヘッドと駆動車輪用モーター
モーター、中空軸フラットギヤヘッドおよび車輪取付用シャフトを一体化した駆動車輪用モーターをラインアップしました。AGVやAMRなど搬送ロボット用途の車軸機構設計、車輪選定の時間短縮に貢献します。
| ギヤヘッドの種類 | 平行軸ギヤヘッド | 中空軸フラットギヤヘッド | 車輪機構:駆動車輪用モーター | ||||
|---|---|---|---|---|---|---|---|
| GFVギヤ・GRギヤ | CSギヤードモーター | FRギヤ | |||||
| 外観 |

|

|

|

|
+ |
|
|

(ゴム車輪) |

(ウレタン車輪) |
||||||
| 特徴 |
|
|
|
|
|||
| モーター出力 | 60 W~750 W | 60 W | 60 W~750 W | 100 W/200 W/400 W | |||
| 減速比 | 5 ~ 200 | 5 ~ 20 | 5 ~ 200 | 20/50 | |||
- ※1
- 車輪については、株式会社イノアック車輪製の車輪をオリムベクスタ株式会社から販売しています。車輪の組み付けは、お客様にお願いしております。
- ※2
- 耐荷重は1輪当たりに加えられる値です。耐荷重を超えないように必ず補助輪を設置してください。
ギヤヘッド、駆動車輪用モーターの特徴についてはこちらをご覧ください。
車輪機構:メカナムホイール 全方向へスムーズに移動し自由な方向転換が可能
モーターとすぐに組み付けられる取付フランジが付いた状態のナブテスコ株式会社製メカナムホイールをオリムベクスタ株式会社から販売しています。

出力:200W、400W |
+ |

|
上位制御機器と役割を分担し、ソフトウェア開発の負担を軽減
モバイルロボットコントローラMVC01は、AGV/AMRの走行に必要な走行制御機能を搭載しています。BLVシリーズRタイプ※のドライバと組み合わせが可能です。
- ※ 750 Wタイプは除きます。

移動・走行支援用コントローラ<参考情報>
以下のアプリケーションとの組み合わせが可能です。
Navitec Systems社「Navitrol」
Navitrol(ナビトロール)は、ガイドレスAGVの自律走行を可能にするソフトウェアです。
Navitrol詳細へ
パナソニックアドバンストテクノロジー株式会社「@mobi」
@mobi(アトモビ)は自律移動ロボットの各種機能を実現するソフトウェアパッケージです。
@mobi詳細へ
STO認証取得について

STO※認証を取得したことにより、安全システムへの対応が容易になりました。周辺機器を削減し、コスト削減や、省スペース化を実現します。
- ※ STO(Safe Torque Off)機能を搭載
SIL 2, PL dの機能安全の認証を取得
| 適用規格 | 仕様 |
|---|---|
| IEC 61800-5-2, EN 61800-5-2 | SIL 2 |
| IEC 61508-1, EN 61508-1 | |
| IEC 61508-2, EN 61508-2 | |
| ISO 13849-1, EN ISO 13849-1 | PL d(Category 3) |
対象製品
BLVD-KRD、BLVD-KBRD (BLVD-KCRDは除く)
製品詳細ページから、認証書のダウンロードが可能です。(ダウンロードには会員登録が必要です。)
ダウンロード方法については、データダウンロードに関するよくあるお問い合わせをご覧ください。
使い勝手向上/おすすめ機能
動作可能電圧範囲が拡大

メリット
- DC24~48Vのバッテリに対応しています。
- バッテリ電圧が低下しても停止しません。
回転速度とトルクを制限しながら運転を続けます。
消費電力10%削減

メリット
- バッテリー駆動の搬送用ロボットの場合、走行できる距離や時間が延びます。
バッテリの充電回数を減らすことができます。 - サポートソフト MEXE02やRS-485通信を使用すると、消費電力を遠隔で監視できます。
充電の目安としてご使用いただけます。

電気的なブレーキで停止時の保持が可能
モーターを励磁することで停止時に保持力を発生(サーボオン)。
電磁ブレーキがないモーターでも、電気的な保持ブレーキとして使用することができます。
また、停止位置からずれないよう位置を保持する機能もあります。
出力トルクを自動的に制限するATL機能
モーターが過負荷状態になっていても、過負荷アラームで停止しないよう、出力トルクを下げて運転を継続しようとするATL機能を搭載しています。
シーケンス機能によりメインプログラムを簡略化
ストアードデータ運転時に使用できる、連結運転や運転間のタイマ設定、条件分岐、ループ回数などの豊富なシーケンス機能を搭載しています。
- ストアードデータ設定数(最大256点)
- ダイレクト入出力点数(入力4点、出力2点)
- リモート入出力点数(入力32点、出力32点)

通信制御可能 Modbus(RTU)CANOpen
BLVシリーズ Rタイプは、Modbus(RTU)、CANopen通信の2つのインターフェイスに対応しています。

Modbus(RTU)でできる主な機能
自由に運転プロファイルを作成可能 ― ダイレクトデータ運転
Modbus(RTU)通信で、データの書き換えと運転の開始を同時にできる運転方法です。
| 運転データの種類 | 内容 |
|---|---|
| 運転方式 | 運転方式を設定します。 |
| 位置 | 目標位置を設定します。 |
| 速度 | 運転速度を設定します。 |
| 加速レート | 加速時間を設定します。 |
| 減速レート | 減速時間を設定します。 |
| トルク制限値 | トルク制限値を設定します。 |
各軸に異なるデータをまとめて送受信可能 ― IDシェアモード
Modbus(RTU)通信で、軸間の同期性を向上する機能です。
複数軸にまとめてデータの送受信ができるため、軸間の通信遅れが改善します。
また、各軸に異なる指令を同時に送信することも可能です。
当社独自の送信方法です。

サポートソフト対応
サポートソフト MEXE02を使用すると、データの設定や実際の駆動、また各種モニタによる確認がパソコン上で簡単におこなえます。
サポートソフトはWEBサイトから無料でダウンロードできます。
立ち上げ スムーズな装置の立ち上げに役立つ機能



稼働 調整に役立つ機能



保守 診断・メンテナンスに役立つ機能
トレースモニタ
モーターの運転状態を連続して24時間以上計測することができます。
データはCSV形式で保存できます。

メリット
- 長時間のデータが残っているため、トラブルの原因究明がしやすくなります。
自動化に貢献する用途事例
ベルトコンベヤ付きの自走搬送ロボット

低床型搬送ロボット

撹拌機

コンベヤ

防犯カメラの電動雲台

関連製品


ステッピングモーター
PKPシリーズ/CVDシリーズ SCタイプドライバ
- 正転・逆転入力で簡単制御
- 2速運転
- 0.02~600r/min

ジップチェーンアクチュエータ®
ZCAシリーズ
今までにない超低床設計かつ、自由な取付方向で設置できるアクチュエータです。圧倒的なスペースセービングによって、設計の自由度拡大に貢献します。

製品を絞り込む