電動スライダ/電動シリンダの選定 電動アクチュエータの仮選定
選定方法
(1)要求仕様の確認
装置の要求仕様を確認します。
- 搬送質量
- m = 15[kg]
- 位置決め距離
- L = 500[mm]
- 位置決め時間
- T = 2秒以内
- 駆動方向
- 垂直
(2)電動アクチュエータの仮選定
要求仕様から、以下の電動アクチュエータを仮選定します。
- 品名
- EASM6
- リード
- 6mm
- 電源入力
- 単相200V
(3)位置決め時間の確認
アクチュエータが時間的に問題なく位置決めできるかを確認します。確認方法としては、グラフを見ておおよその位置決め時間を求める方法と、計算によってある程度正確な位置決め時間を求める方法があります。それぞれの確認手順を次に示します。
なお、実際の動作時間とは若干の誤差が生じますので目安としてください。
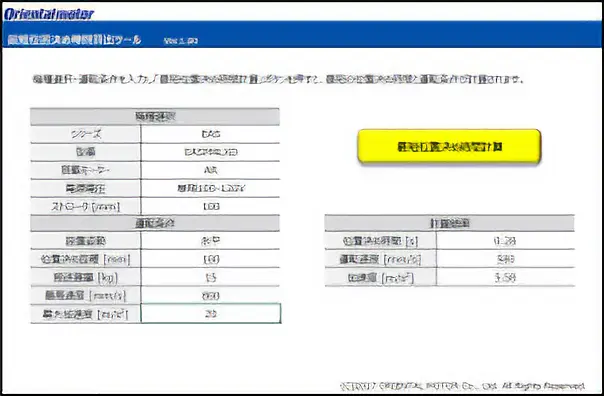
最短位置決め時間算出ツールで求める場合
当社電動スライダ・電動シリンダの該当製品について、「機種」「運転条件」に合わせて目安となる位置決め時間を算出できます。
グラフから求める場合
- ①
-
位置決め距離500mmを動かす場合の位置決め時間をグラフより確認します。
位置決め時間 : 1.77s
要求されている位置決め時間2秒以内を満足できているので使用可能です。
- ②
-
位置決め時間を満足する場合は、運転速度、加速度を確認します。
運転速度 : 320mm/s
加速度 : 1.5m/s2(0.15G)
- ③
- 位置決め時間を満足しない場合は、使用する機種を再選定してください。
計算で求める場合
- ①
-
運転条件の確認
以下の条件を確認してください。
位置決め距離、起動速度、加速度、運転速度
- ②
-
上記の運転条件から、駆動パターンが三角駆動となるか台形駆動となるか確認
位置決め距離、起動速度、加速度、運転速度から、三角駆動した場合の、最大速度を算出します。算出された最大速度が運転速度以下の場合三角駆動になり、運転速度を超える場合は台形駆動となります。
- ③
-
位置決め時間の計算
<台形駆動の場合>
<三角駆動の場合>
-
- VRmax
- 三角駆動とした場合の算出された最大速度[mm/s]
- VR
- 運転速度[mm/s]
- Vs
- 起動速度[mm/s]
- L
- 位置決め距離[mm]
- a1
- 加速度[m/s²]
- a2
- 減速度[m/s²]
- T
- 位置決め時間[s]
- T1
- 加速時間[s]
- T2
- 減速時間[s]
- T3
- 定速時間[s]
なお、実際の動作時間とは若干の誤差が生じますので目安としてください。
その他の換算式を以下に示します。
パルス速度と運転速度は次の式で換算できます。運転速度は仕様の最大速度以下でご使用ください。
動作パルス数と移動量は次の式で換算できます。
加減速レートと加速度は次の式で換算できます。
上位制御機器により速度、移動量、加速度の入力方法が異なりますのでご使用にあわせて計算してください。
選定サービスのご案内
簡単にご利用いただけるモーター選定ツールや、専任スタッフによる最適製品の選定サービス(無料)をおこなっております。
モーター選定ツール
WEB上で機構や運転条件の数値を入力していただくだけで、製品を選ぶことができるツールです。7つの機構から、すべてのカテゴリのモーターを選定できます。
選定を依頼する
手間のかかる負荷計算からモーター選定までをお客様に代わっておこないます。