バッテリレス アブソリュートセンサ搭載
αSTEP AZシリーズ

- バッテリレスアブソリュートセンサ搭載
- AC/DC入力
- FAネットワーク対応
- 幅広い速度範囲・トルク帯
ケーブルタイプのモーターに、直交軸 FCギヤードタイプ 取付角寸法35mmを追加しました。
特徴 | αSTEP AZシリーズ
ABZO(アブゾ)センサ搭載
新開発ABZOセンサ
小型のバッテリレスの機械式アブソリュートセンサです。生産性の向上やコスト削減に貢献します。
モーター、ドライバともに、お求めやすい価格です。
定価 68,200円~

機械式センサ
ABZOセンサは歯車を複数搭載しており、個々の歯車の角度を認識することで位置情報を検出します。
そのためバッテリが不要です。
多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転(1800回転分)の絶対位置が検出可能です。
- ※ 取付角寸法20mm、28mm(30mm)は±450回転(900回転分)です。
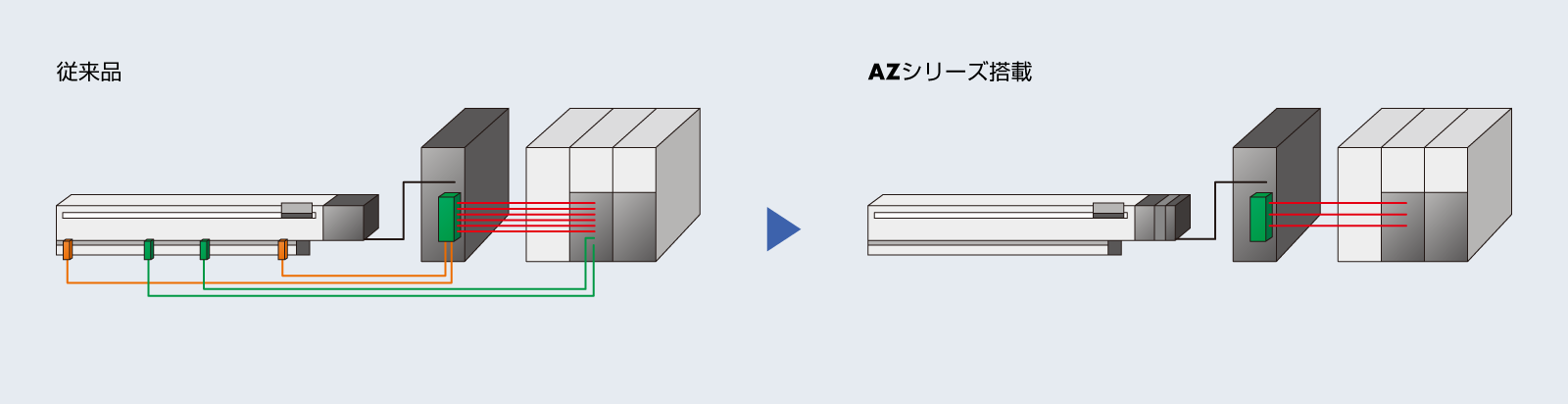
外部センサ不要
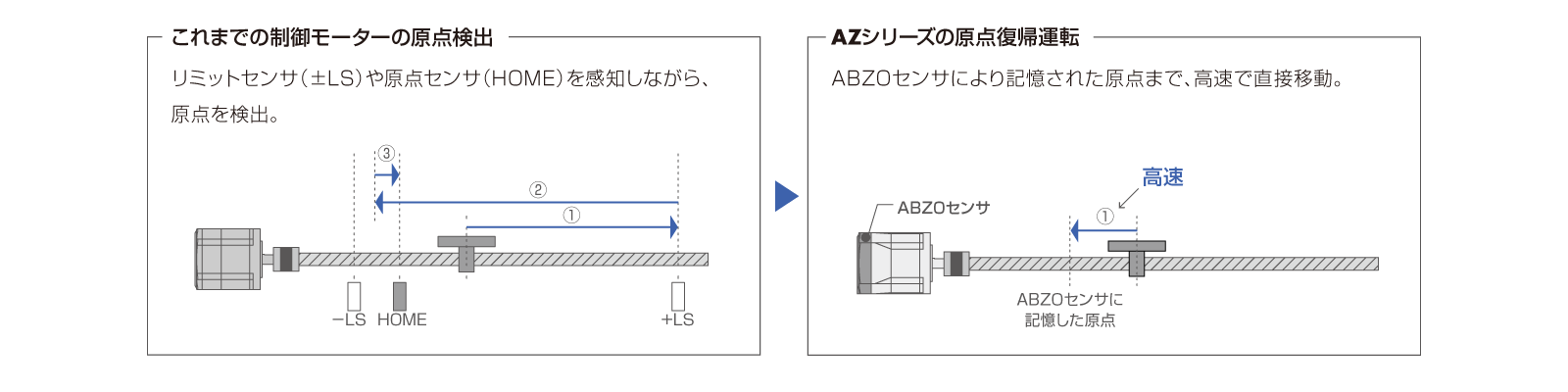
アブソリュートシステムのため、原点センサ、リミットセンサなどの外部センサは不要です。
高速原点復帰+原点復帰精度の向上
原点センサ、リミットセンサ無しで原点復帰ができます。センサの感度を気にせず、高速の原点復帰を実現し、マシンサイクルを短縮します。同時に、センサの感度による原点位置のバラつきが起こらなくなります。原点の精度を向上できます。
コストダウン
外部センサにかかる費用や、配線に関する費用がかかりません。システム全体をコストダウンします。
装置設計の自由度が向上
外部センサの設置や配線に必要だったスペースを節約できます。装置設計の自由度を向上させます。
外部センサ誤動作の影響をうけない
金属加工で金属片が舞う環境下や、オイルミストが舞う環境下などで起こりうる、外部センサの誤動作や故障、断線が発生しません。
実際にご購入・ご使用されているお客様からいただいた、製品へのご感想を紹介します。
-
 以前製作した装置では、埃の多い環境だったので、センサのトラブルがあり非常に苦労しました。今回はAZを採用したことで、センサを使わなくても良かったので、スムーズに立ち上げが進んでいます。
以前製作した装置では、埃の多い環境だったので、センサのトラブルがあり非常に苦労しました。今回はAZを採用したことで、センサを使わなくても良かったので、スムーズに立ち上げが進んでいます。 -
熱を極力出したくないので、運転一回ごとにモーターの励磁を切っています。
再度励磁して運転するときに、原点復帰がいらないのはいいですね。 -
 検査エリアは低速、エリア外は高速で動かしたいと思っていました。
検査エリアは低速、エリア外は高速で動かしたいと思っていました。
当然センサが必要になると想定していたのですが、AZシリーズの仮想入力の機能を使うとセンサなしで動きが実現でき、驚きました。 -
メンテナンスのときに、ケーブルを外してもモーターの位置情報が保持できているのは助かります。従来のようにメンテナンス後の原点復帰運転がいらなくなりました。
-
 ボールねじの機構で、今まではリミットセンサを使っていましたが、ドライバのソフトウェアリミットも良いですね。モーターが位置情報を持っているので、信頼性が高いです。
ボールねじの機構で、今まではリミットセンサを使っていましたが、ドライバのソフトウェアリミットも良いですね。モーターが位置情報を持っているので、信頼性が高いです。
バッテリレス
バッテリ不要の、機械式センサです。位置情報を機械的に管理します。
位置情報を保持
位置決め運転中に電源が遮断されたり、モーター/ドライバ間のケーブルが外されても、位置情報を保持します。
原点復帰運転の時間を削減できます。
メンテナンスの削減
バッテリの交換が不要です。メンテナンスの手間やコストを削減します。
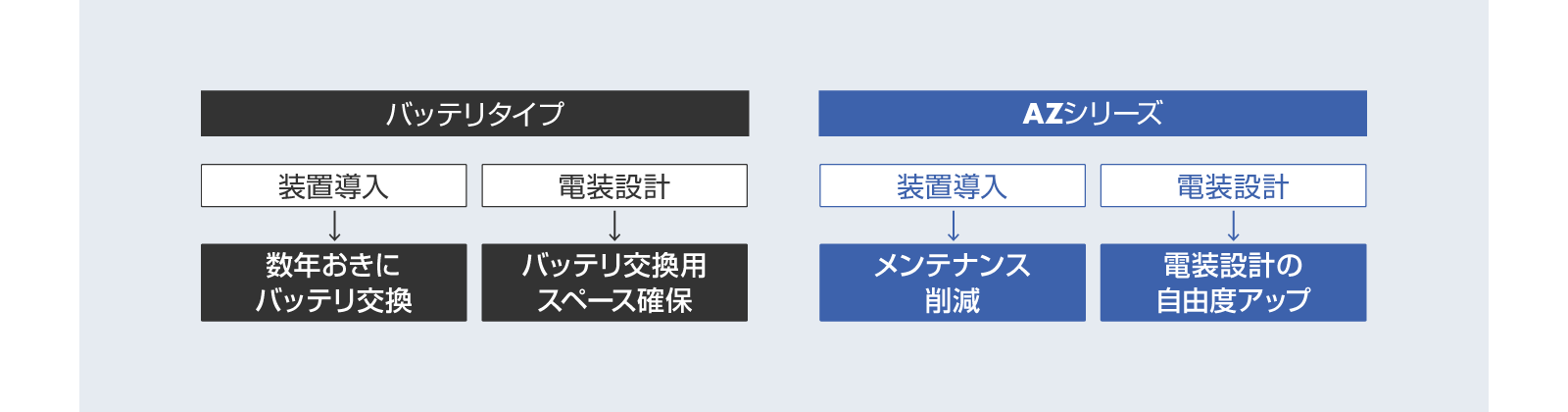
ドライバ設置の自由度が向上
バッテリの設置や配線に必要だったスペースを節約できます。ドライバ設置場所の制約がなく、制御盤等のレイアウト設計の自由度を向上させます。
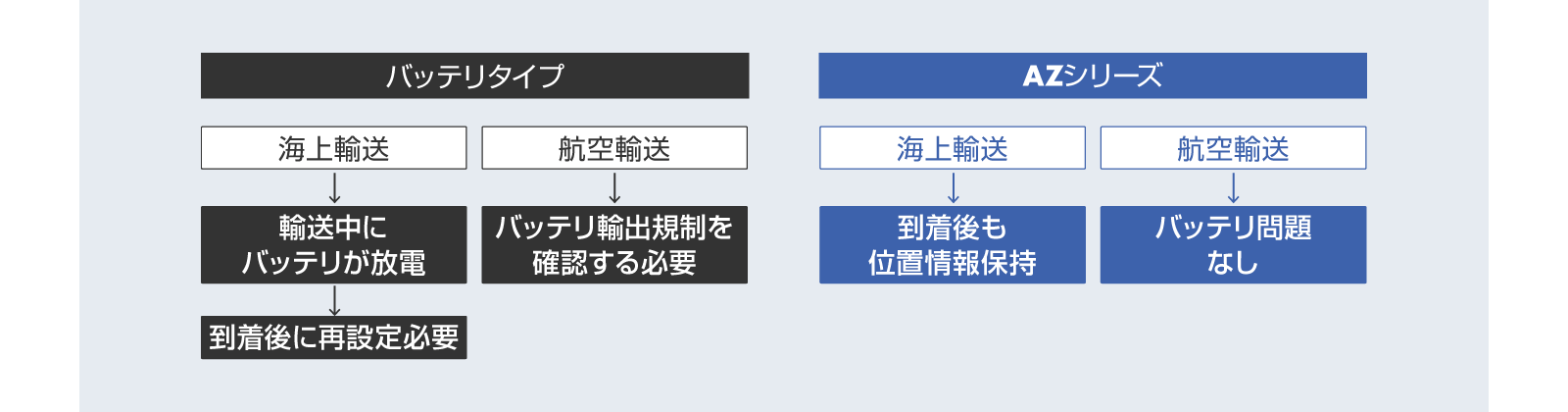
海外輸送も安心
バッテリは自己放電するため、海外輸送といった長期間の装置搬送では注意が必要です。ABZOセンサなら、位置情報の保持に期限はありません。また、バッテリを海外に輸出する際の各種規制等も考慮する必要がありません。
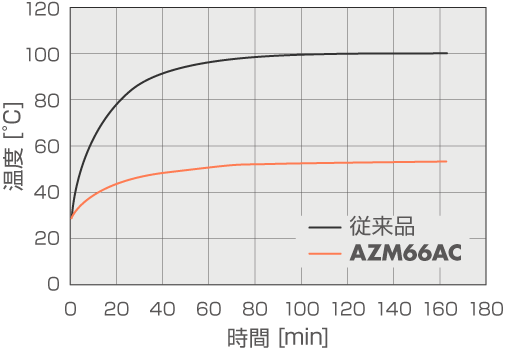
省電力・低発熱
発熱を大幅に低減
-
サーモグラフィーによる温度分布
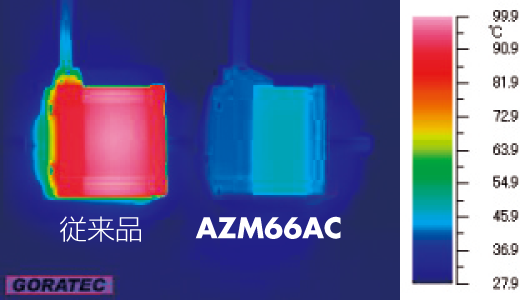
同一条件で運転した場合のイメージです。 -
同一条件運転時のモーター外被温度
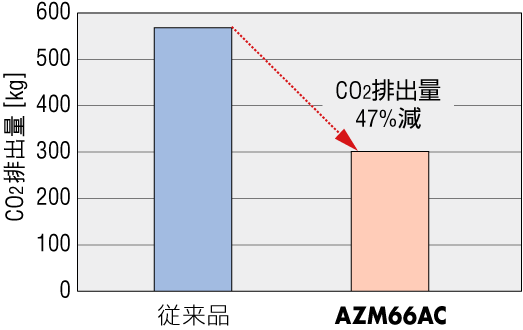
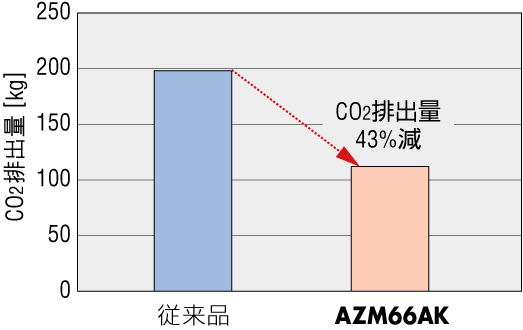
省エネルギーにより消費電力量削減
-
AC電源入力
消費電力量とCO2排出量を従来比47%減(当社比)
運転条件
-
- 回転速度
- 1000r/min
-
- 負荷率
- 50%
-
- 稼働時間
- 24時間連続運転、365日
-
- 運転状況
- 運転70%、待機25%、停止5%
-
- 電源電圧
- 単相200-240V
-
- CO2係数
- 0.519kg-CO2/kWh
-
-
DC電源入力
消費電力量とCO2排出量を従来比43%減(当社比)
運転条件
-
- 回転速度
- 1000r/min
-
- 負荷率
- 50%
-
- 稼働時間
- 24時間連続運転、365日
-
- 運転状況
- 運転70%、待機25%、停止5%
-
- 電源電圧
- DC24V
-
- CO2係数
- 0.519kg-CO2/kWh
-
無調整でも安定して速い、クローズドループとオープンループの融合
通常時はオープンループ制御で駆動、過負荷時はクローズドループ制御
通常時はオープンループ制御で駆動するため、様々な利点があります。
過負荷時は自動的にクローズドループ制御に切り替えることで、異常停止を防止します。
オープンループ制御の利点
ゲイン調整しなくても、指令に同期して動く
タイミングベルトのような剛性が低い機構でも、無調整で指令に追従できます。
負荷条件が変わっても、指令に同期して動く
カムのような負荷変動が大きい機構でも、無調整で指令に追従できます。
ハンチングしない
モーター停止時の微振動が問題になるような用途でも、安心して使えます。
クローズドループ制御の利点
過負荷時は、モーターのトルクが最大になるように制御します。トルク不足によるモーターの停止などのトラブルを回避できます。
充実のモニタ機能
モーターにセンサが搭載されているため、位置や速度の情報を常に監視できます。
運転状態の監視に便利な「位置決め完了信号」などもあります。
モーター・ギヤードタイプの種類と特徴
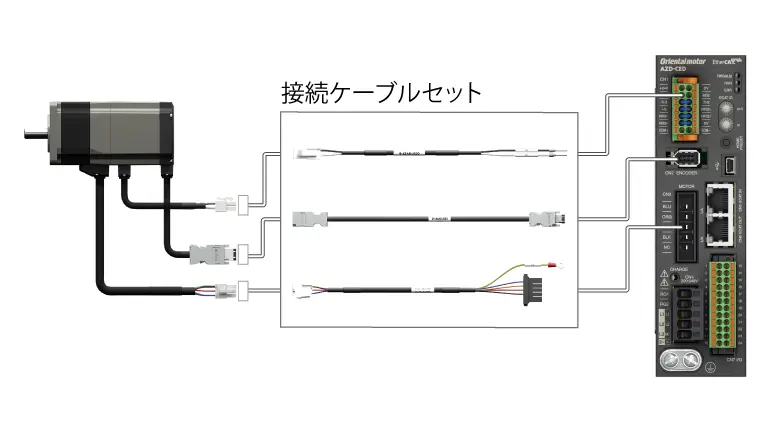
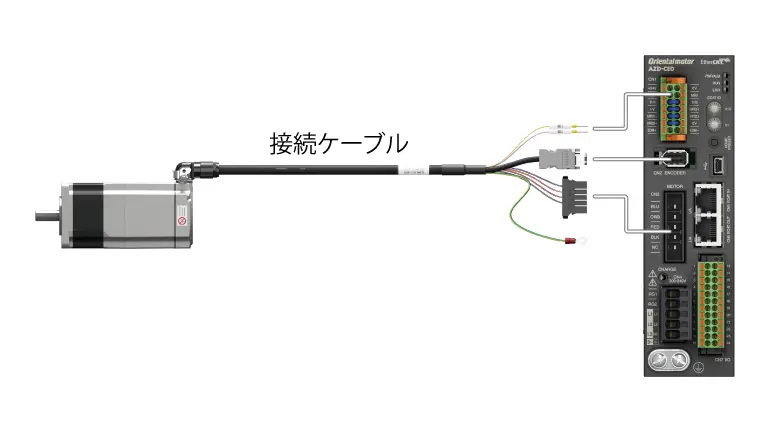
モーターは2つの接続方式をラインアップ
|
ケーブルタイプ 複数ケーブルで中継して接続 |
コネクタタイプ ケーブル1本でダイレクト接続 コネクタタイプの特徴・メリットはこちら |
|---|---|
|
|
| モーター : 45,300円 ケーブル : 7,400円 ドライバ : 51,700円 |
モーター : 47,300円 ケーブル : 9,200円 ドライバ : 51,700円 |
- ※ 価格は、AC電源入力 取付角寸法42mm 電磁ブレーキ付 ケーブル3m パルス列入力ドライバの場合です。
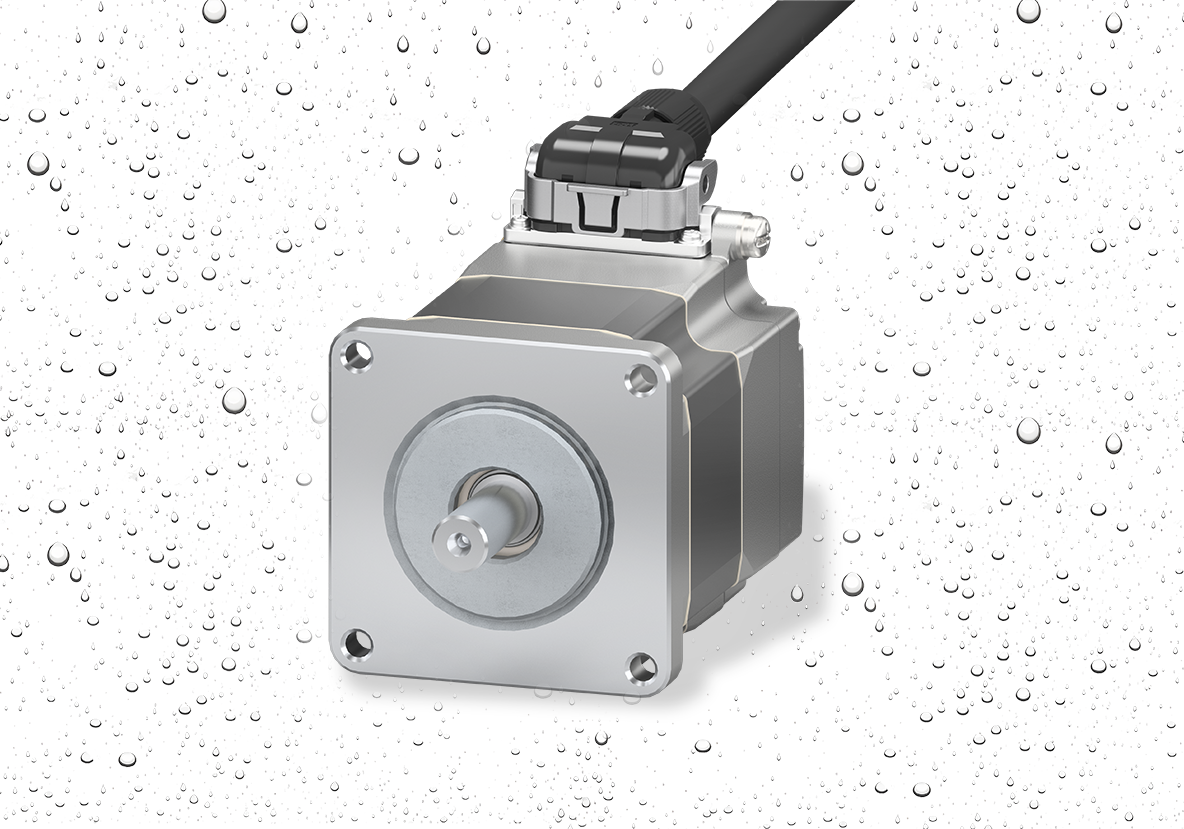
保護等級IP66仕様(コネクタタイプ)
保護等級IP66のため、高い防塵性があり、水滴がかかる可能性がある環境で使用できます。
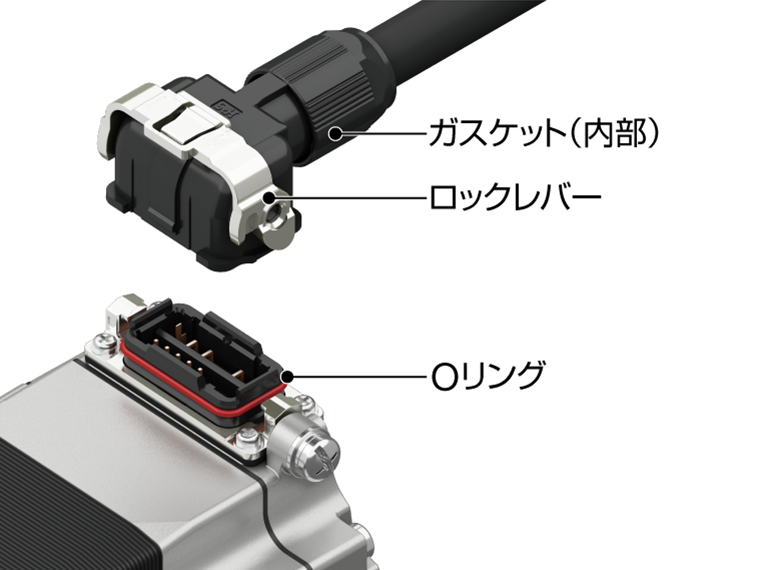
コネクタ構造
コネクタ構造はガスケット、Oリングを内蔵し防水性が向上。コネクタ部分も含めてIP66に適合しています。
ギヤードタイプの種類と特徴
高トルク・高分解能が得られる他、大慣性負荷の駆動が可能など様々なメリットが得られます。
| タイプ | 特徴 | 取付角寸法 [mm] |
バックラッシ [arcmin] |
分解能 (1000P/R設定時) [゜/パルス] |
|
|---|---|---|---|---|---|
| TSギヤード |

|
|
42 ~ 90 | 10 ~ 45 | 0.012 ~ 0.1 |
| 直交軸FCギヤード |

|
|
35、42 、60 | 10 ~ 40 | 0.012 ~ 0.05 |
| PSギヤード |

|
|
28 ~ 90 | 7 ~ 35 | 0.0072 ~ 0.072 |
| HPGギヤード |

|
|
40 ~ 90 | 3 | 0.024 ~ 0.072 |
| ハーモニックギヤード |

|
|
30 ~ 90 | 0 | 0.0036 ~ 0.0072 |
ドライバの種類と特徴
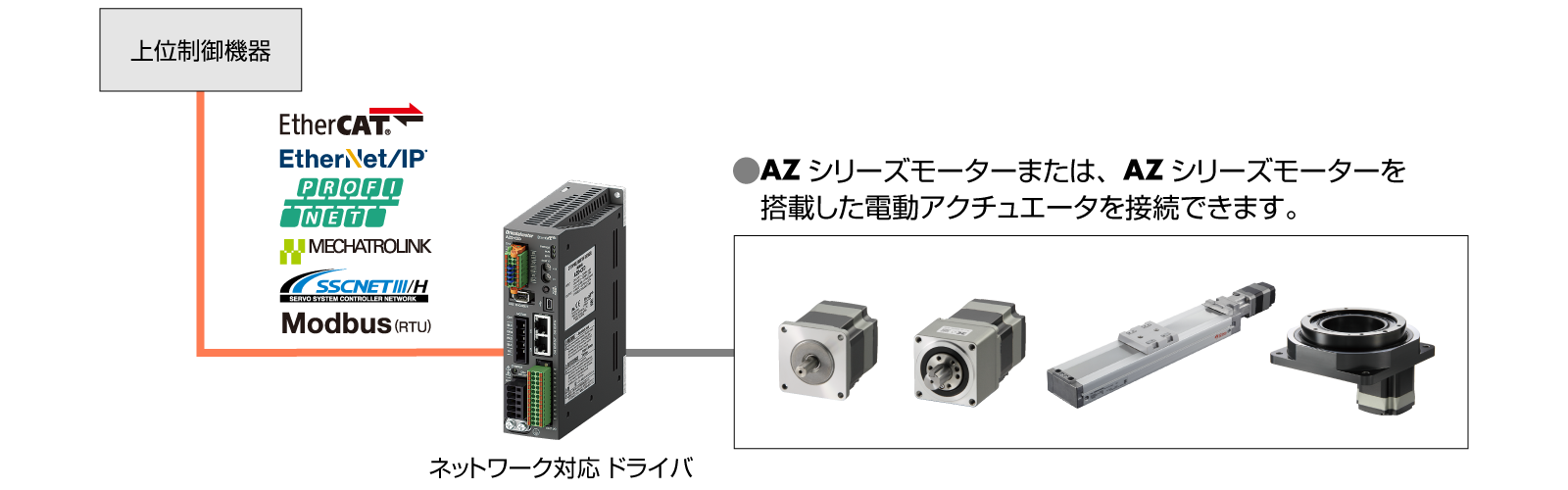
ネットワーク対応ドライバ
全世界で使用されている主要なFAネットワークに対応し、装置情報の一元管理、省配線に貢献します。AC電源入力ドライバはDC電源入力よりトルク面で優れ、DC電源入力ドライバはAC電源入力より小型です。目的や用途に合わせてご検討ください。
-

AC電源入力 -

DC電源入力
|
|
|

|
| EtherCAT対応 | EtherNet/IP対応 | PROFINET対応 |
| AC電源入力 DC電源入力 |
AC電源入力 DC電源入力 |
AC電源入力 DC電源入力 |
|
|
|
|
| MECHATROLINK-Ⅲ対応 | SSCNETⅢ/H対応 | 位置決め機能内蔵タイプ |
| AC電源入力 | AC電源入力 | AC電源入力 DC電源入力 |
- ※ 位置決め機能内蔵タイプは、別売のネットワークコンバータ(ゲートウェイ)を併用することで、CC-Linkによる制御が可能です。
当社製品と他社製品との組み合わせについて、接続や設定に関する情報を掲載しています。
プログラム設計や装置立ち上げにお役立てください。
対象メーカー例 : オムロン株式会社 / 三菱電機株式会社 / 株式会社安川電機
miniドライバ(DC電源入力のみ)
単軸ドライバより、さらに小型・軽量に設計されたminiドライバです。狭いスペースでも設置できます。バッテリ電源で使用できるワイドな電圧仕様のため、自走装置への組み込みにも適しています。
EtherCAT対応

EtherNet/IP™対応

PROFINET対応

Ethernetタイプ

RS-485通信タイプ

RS-485 通信付きパルス列入力タイプ

- ※ RS-485通信タイプは、別売のネットワークコンバータ(ゲートウェイ)を併用することで、CC-Link、MECHATROLINKによる制御が可能です。
多軸ドライバ(DC電源入力のみ)
ドライバ1台で複数軸(最大4軸)を制御できる、多軸ドライバです。上位ネットワークや電源との接続がドライバ1台に集約され、省配線と省スペース、コストダウンに貢献します。
-

2軸タイプ -

3軸タイプ -

4軸タイプ -

NEW
スリムタイプ(4軸) -

- スリムタイプの詳細は、最寄りの支店・営業所またはお客様ご相談センターにお問い合わせください。
- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ EtherNet/IP™はODVAの商標です。
- ※ PROFINETは、PROFIBUS Nutzerorganisation e.V.(PNO)の商標または登録商標です。
- ※ Modbusは、Schneider Automation Inc. の登録商標です。
- ※ Ethernetは、富士フィルムビジネスイノベーション株式会社の登録商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ SSCNETⅢ/Hは三菱電機株式会社の登録商標です。
位置決め機能内蔵タイプ
- 「位置」や「速度」などの運転データをドライバに設定し、I/Oユニットなどで運転データの選択と実行をおこないます。運転データは最大256点まで登録できます。
- I/O、Modbus(RTU)、ネットワークコンバータ(ゲートウェイ)のいずれかの方法で制御できます。ネットワークコンバータを併用すると、CC-Link、EtherCAT、MECHATROLINKでの制御が可能です。

- ※ CC-LinkはCC-Link協会の登録商標です。
- ※ MECHATROLINKはMECHATROLINK協会の登録商標です。
- ※ EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
- ※ Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
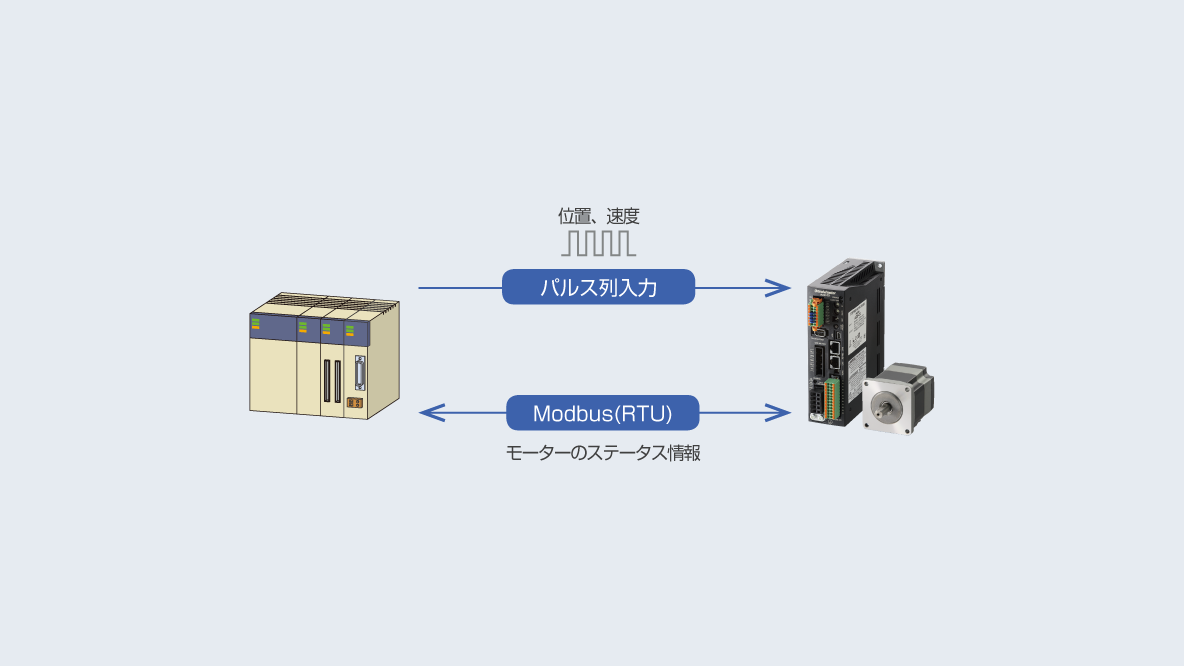
RS-485通信付きパルス列入力タイプ
ドライバに入力されたパルス信号に応じて、運転を実行します。位置決めユニット(パルス発振器)などで制御します。モーターのステータス情報(位置、速度、アラームなど)を、RS-485通信でモニタできます。
- ※ Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
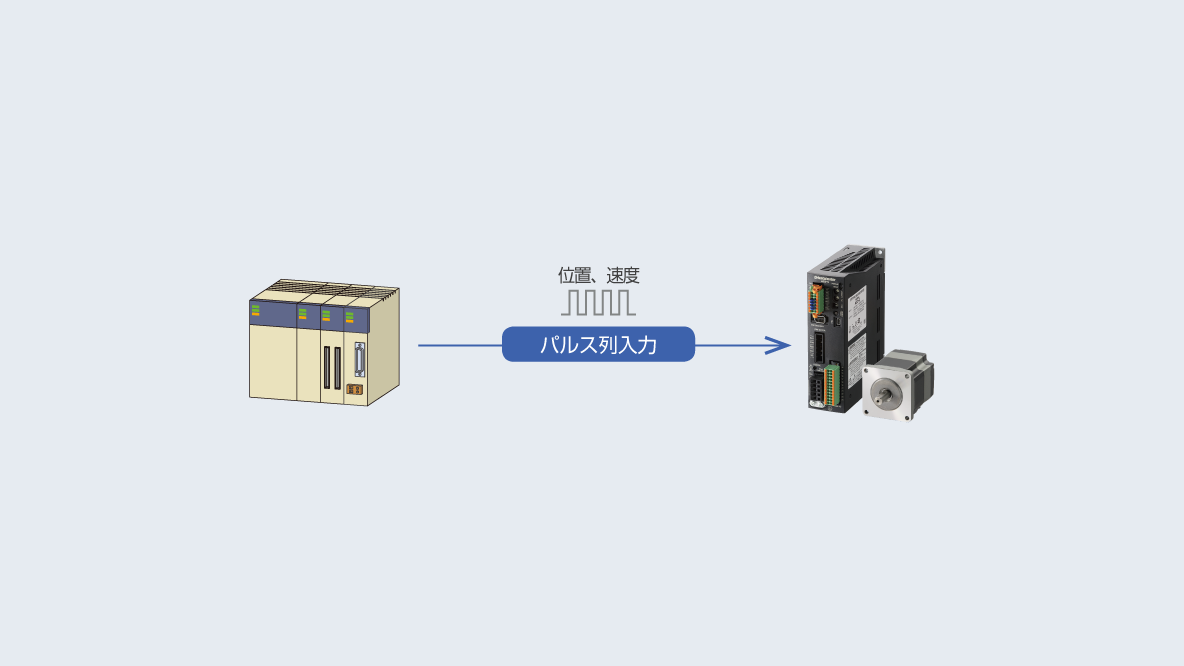
パルス列入力タイプ
ドライバに入力されたパルス信号に応じて、運転を実行します。位置決めユニット(パルス発振器)などで制御します。
「機能安全」の認証取得について

「機能安全※」の認証を取得したことにより、安全システムへの対応が容易になりました。周辺機器を削減し、配線の簡易化や、省スペース化を実現します。
- ※ STO(Safe Torque Off)機能を搭載
SIL 3, PL eの機能安全の認証を取得
| 適合規格 | 安全度レベル |
|---|---|
| IEC 61800-5-2, EN 61800-5-2 | SIL 3 |
| IEC 61508-1, EN 61508-1 | |
| IEC 61508-2, EN 61508-2 | |
| ISO 13849-1, EN ISO 13849-1 | PL e(Category 3) |
対象製品
αSTEP AZシリーズ AC電源入力ドライバ
- EtherCAT ドライブプロファイル対応
- EtherNet/IP™対応
- PROFINET対応
- MECHATROLINK-Ⅲ対応
- SSCNETⅢ/H対応
- 位置決め機能内蔵タイプ
- RS-485通信付きパルス列入力タイプ
- パルス列入力タイプ
製品詳細ページから、認証書のダウンロードが可能です。(ダウンロードには会員登録が必要です。)
ダウンロード方法については、データダウンロードに関するよくあるお問い合わせをご覧ください。
サポートソフトによるテスト・モニタ
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
さまざまな機能で、立上げからメンテナンスまでを総合サポート
-
立ち上げ・評価
配線チェックやテスト運転時に役立つ機能をご用意しています。
- 運転データの設定と保存
- I/Oモニタ
- ティーチング・リモート運転
-
調整
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
- 波形モニタ
-
診断・メンテナンス
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
- アラームモニタ
- ユニット情報モニタ
- ステータスモニタ
-
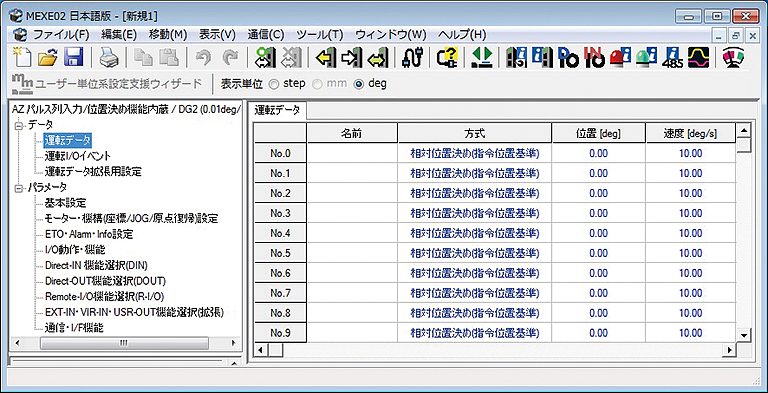
運転データ/パラメータ設定画面 -
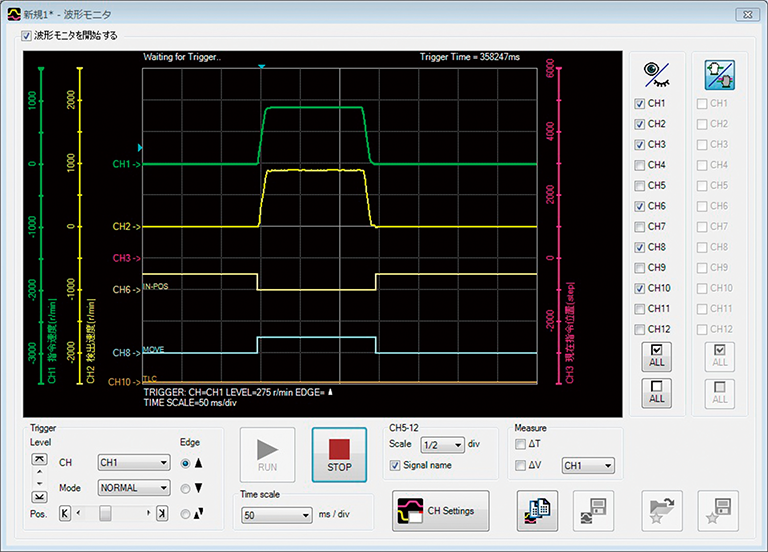
波形モニタ
製品を絞り込む







