電動グリッパ EHシリーズ αSTEP AZシリーズ搭載 ラインアップ
電動グリッパ、ドライバ、接続ケーブル、それぞれをご購入ください
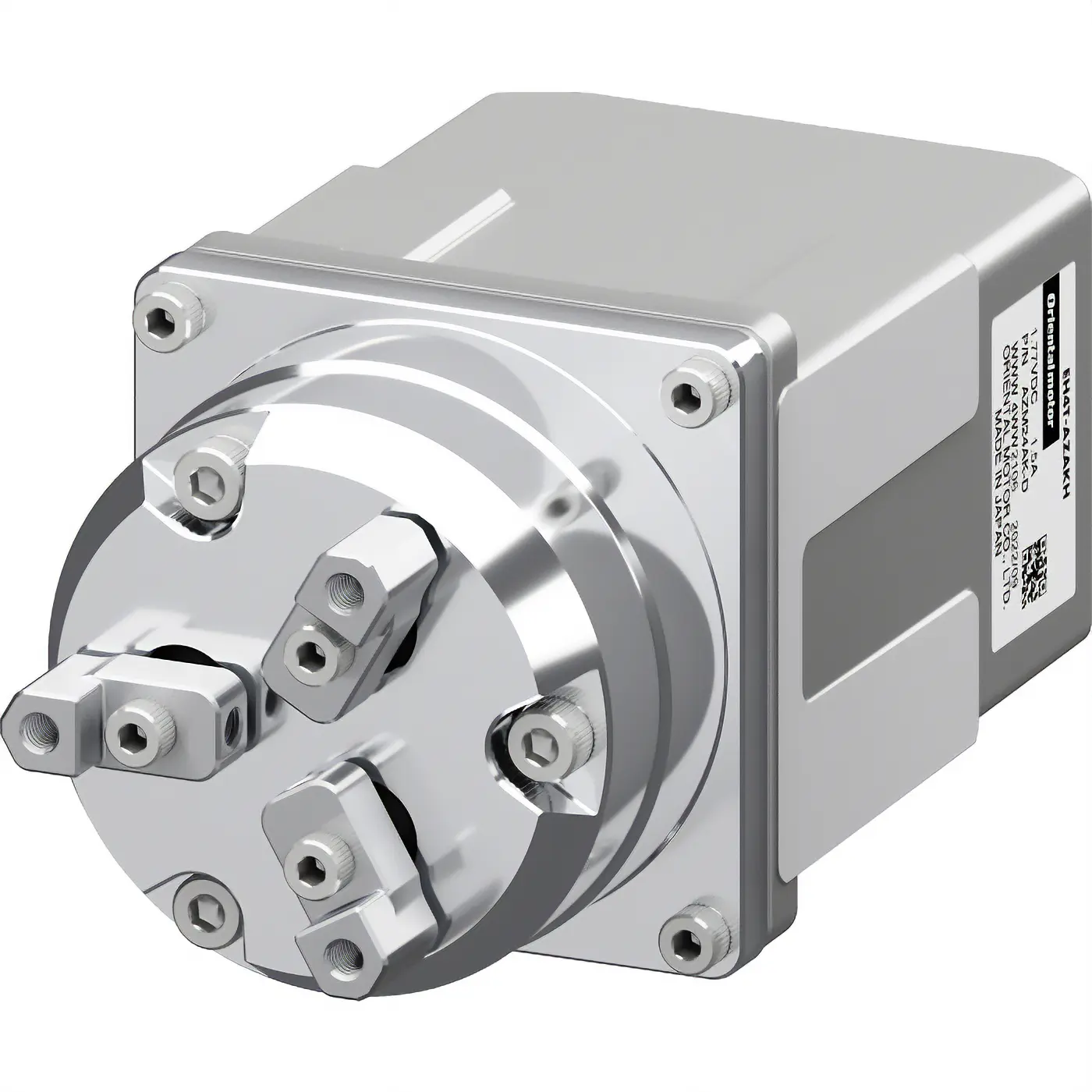
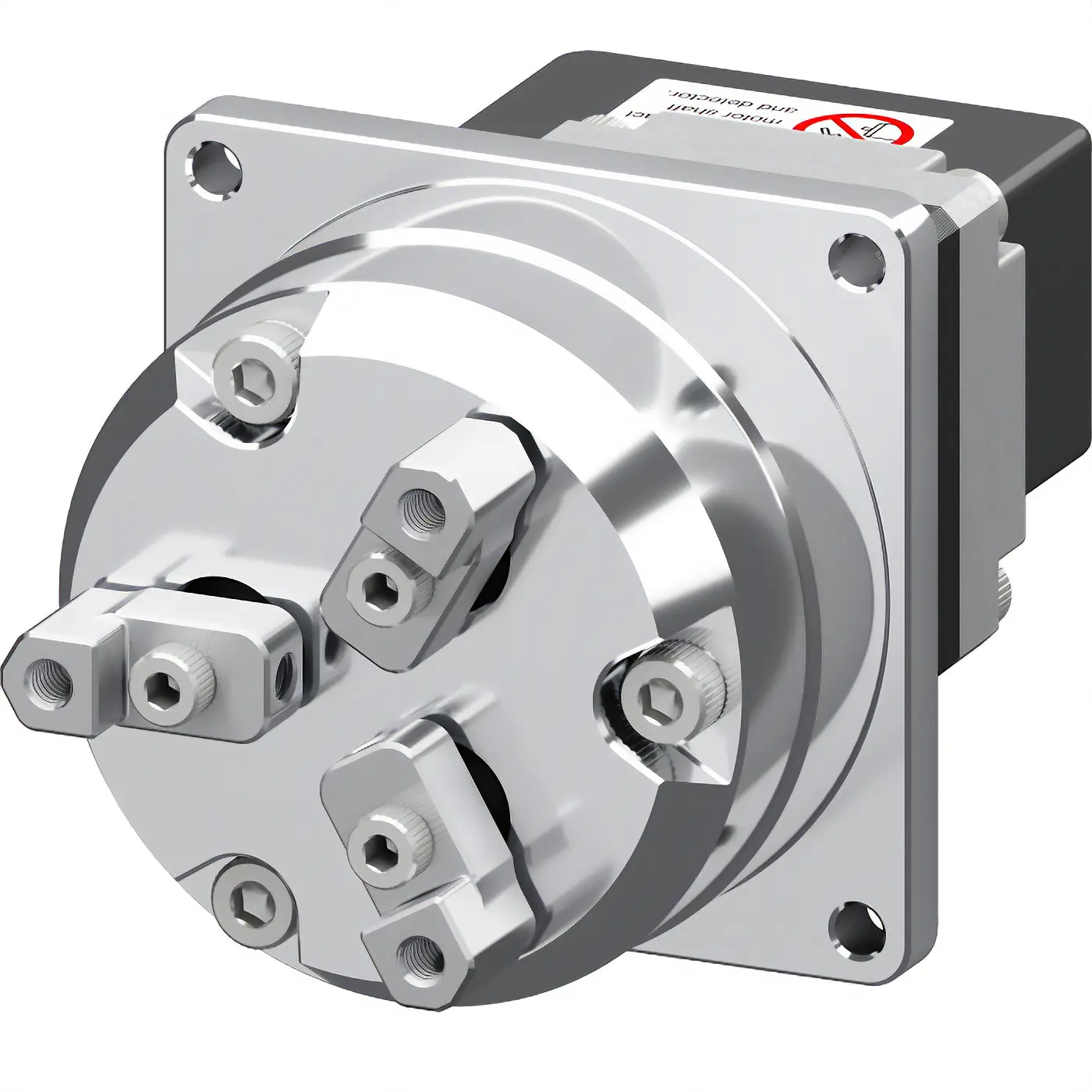
電動グリッパ
2つ爪タイプ
| 最大把持力 | ストローク (両側) |
最小移動量 (両側) |
サイズ | 質量 | |
|---|---|---|---|---|---|

|
7N | 0 ~ 15mm | 0.02mm | W42.5mm × D80.5mm × H36mm | 200g |

|
25N | 0 ~ 25mm | W48.5mm × D91mm × H46mm | 380g |
3つ爪タイプ
| 最大把持力 | 把持径※1※2 | サイズ | 質量 | |
|---|---|---|---|---|
|
50N | 把持物の外径を把持 φ2~φ24mm 把持物の内径を把持 φ14~φ36mm |
W48.5mm × D98mm × H46mm | 380g |
|
W47mm × D90.5mm × H46mm | 280g |
- ※1
- 把持物の直径(D)に対して、約0.5mm(最小値)のクリアランスを考慮した値です。
- ※2
- アタッチメントの直径(d)がφ6mmの場合です。
EHシリーズを市販の産業用ロボット(協働ロボット)に取り付けるためのフランジをご用意しています。
エンドエフェクタ側、ロボット側の2枚組です。
ロボット側のフランジは、ISO9409-1(JIS B 8436)に準拠した形状です。

ドライバ
| インターフェース | 電源入力 | ||
|---|---|---|---|
| 位置決め機能内蔵(Modbus対応) | DC24V | ||
| RS-485通信付きパルス列入力 | |||
| パルス列入力 | |||
| EtherCAT対応 | |||
| EtherNet/IP™対応 | |||
| PROFINET対応 | |||
 |
EtherCAT対応 | ||
| EtherNet/IP™対応 | |||
| PROFINET対応 | |||
| 位置決め機能内蔵(Modbus対応) | |||
| RS-485通信付きパルス列入力 | |||
接続ケーブル/可動接続ケーブル
- モーターから出ているモーターケーブルは、ドライバに直接接続できません。接続ケーブルを合わせてご検討ください。
- ケーブルが屈曲される場合には、可動接続ケーブルをお使いください。
| 長さ[m] | |
|---|---|
| 0.5 ~ 20 |