モバイルロボットコントローラ
MVC01
- 搬送ロボットAGV/AMRの走行制御機能を搭載
- 専用PCソフトで立ち上げからメンテナンスまでをサポート
- IMU搭載でジャイロオドメトリを出力
- BLVシリーズRタイプと組み合わせ可能
特徴 | モバイルロボットコントローラ MVC01
AGV/AMRの自作、開発に役立つ搬送ロボット制御用コントローラ
AGV/AMRの自作、開発では、通常、ロボットの車輪構造に応じた運動学(キネマティクス)の実装が必要になります。差動二輪、メカナムホイールなど、それぞれの機構に合わせて各モーターへの速度分配をおこなう必要があり、上位ソフトウェアの開発を複雑にする要因となっていました。
MVC01は、こうした移動機構の違いを内部で処理し、上位制御機器からはシンプルな速度指令だけでロボットを制御できます。
対応する速度指令
- 前進並進速度
- 左右並進速度※
- 回転速度
- ※ メカナムホイールなどの全方向に移動できるロボットタイプのみ。
組み合わせ製品
ブラシレスモーターBLVシリーズRタイプ※
- ※ 750 Wタイプは除きます。
狭いスペースにも収まるコンパクトサイズです。BLVシリーズRタイプのドライバと同等のサイズ感です。
モバイルロボットコントローラ
質量:60 g
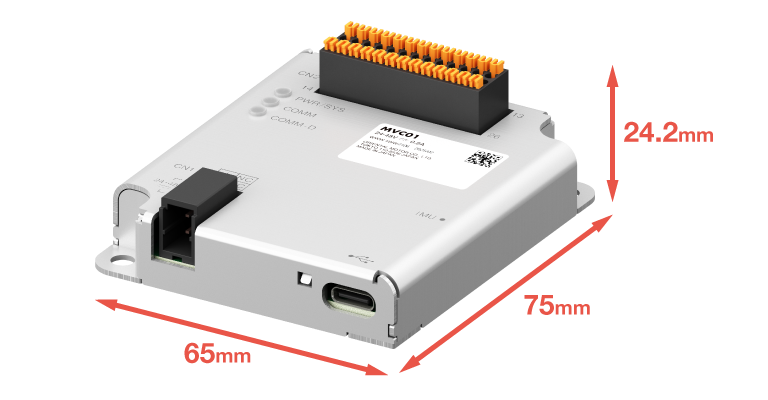
BLVシリーズRタイプドライバ
質量:120 g

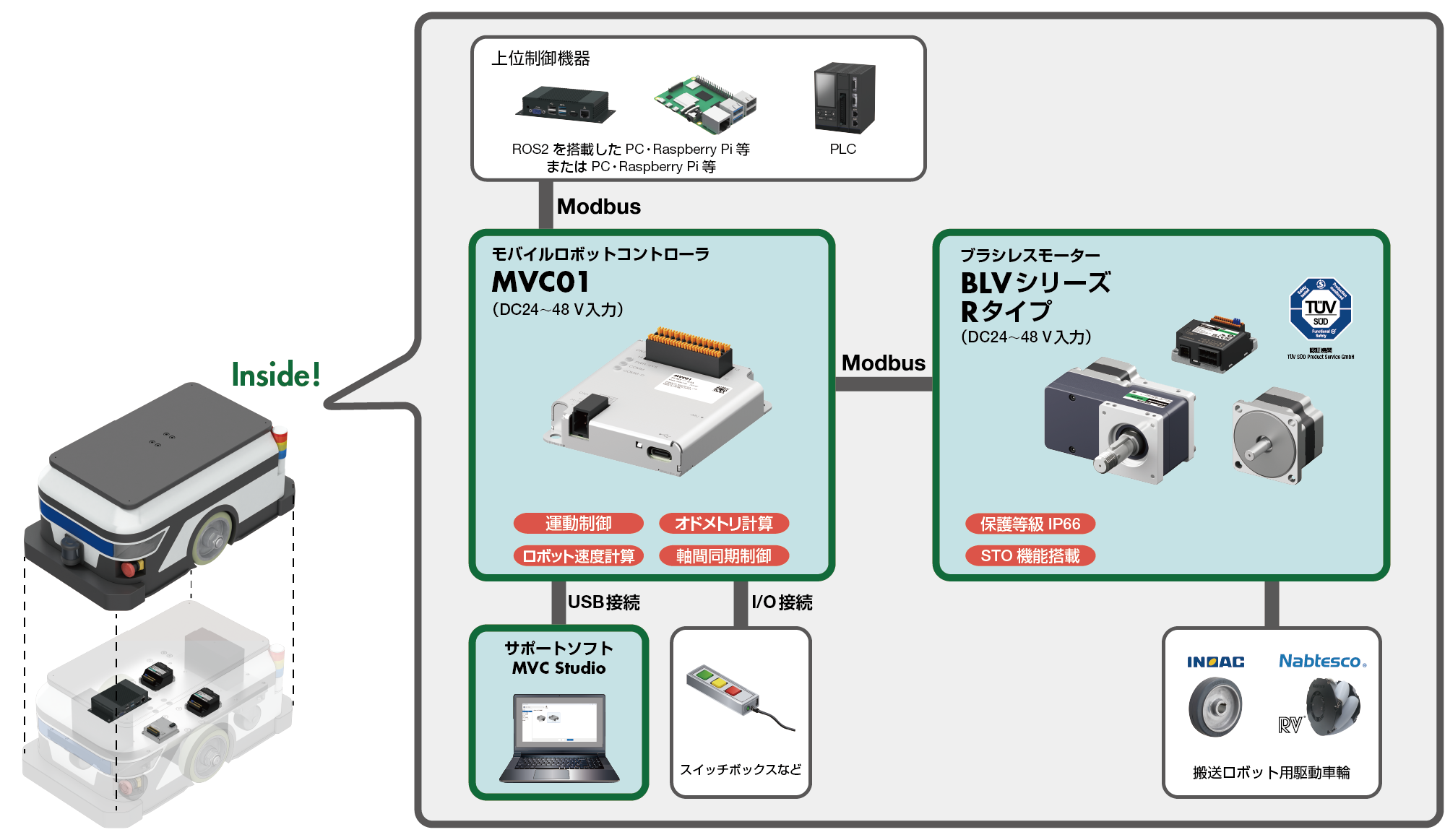
上位制御機器と役割を分担し、ソフトウェア開発の負担を軽減
モバイルロボットコントローラは、AGV/AMRの走行に必要な走行制御機能を搭載しています。車輪ごとの計算や軸間同期制御はモバイルロボットコントローラがおこなうため、ソフトウェア開発の負担軽減と立上げ時間の短縮に貢献します。
搬送ロボット(AGV/AMR)の走行制御機能をモジュール化
| 上位制御機器のみで制御 | 「上位制御機器+モバイルロボットコントローラ」で制御 |
|---|---|
| 上位アプリケーション、走行制御アプリケーション共に上位制御機器が担当 | 【役割を分担】 ・走行制御アプリケーション→モバイルロボットコントローラが担当 ・上位アプリケーション→上位制御機器が担当 |
| ソフト設計負担 大 | ソフト設計負担 小 |
構成部品比較(AMRの場合)
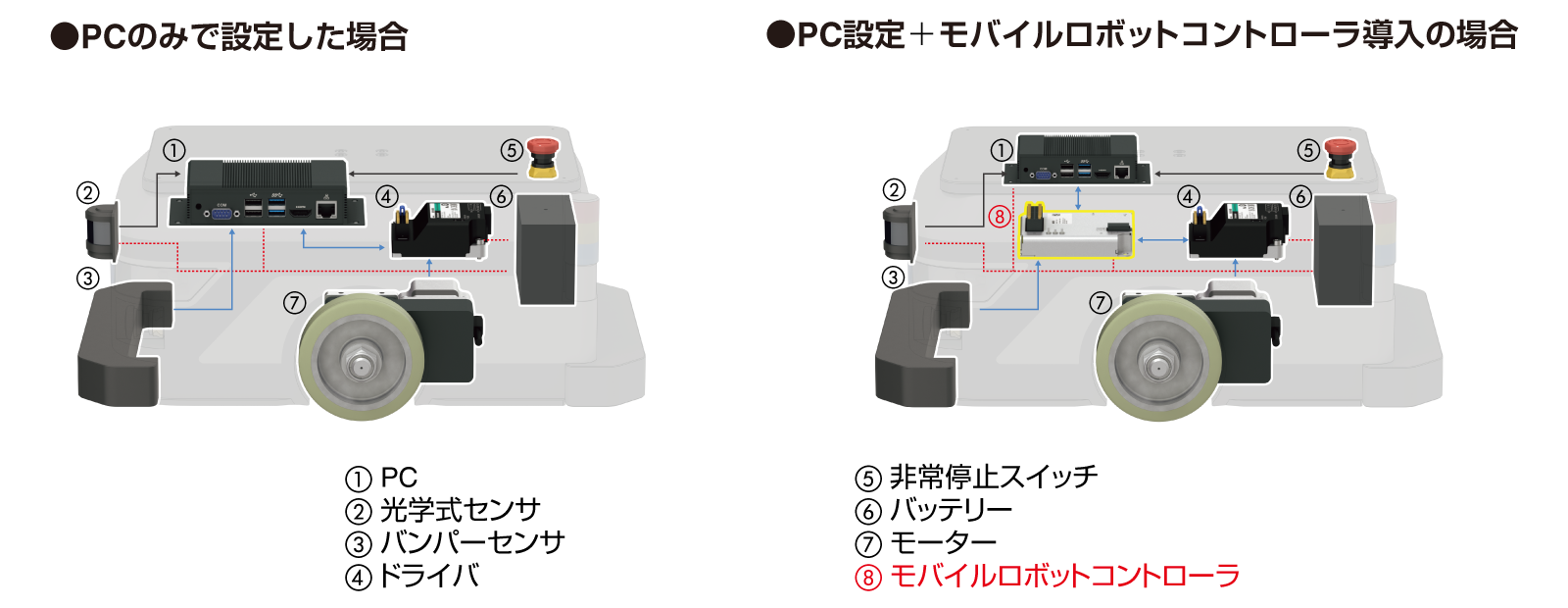
アプリケーションの比較(AMRの場合)

走行制御のモジュール化による車輪や駆動方式などのカスタマイズ性の向上
ソフトウェアをすべてROSで開発した場合、車輪の変更など機構をカスタマイズした際にはROSのプログラムを変更する必要があり変更負荷も大きくなります。走行制御にMVC01を使うことで、車輪の機構設定はMVC Studioでおこなえるため、上位側での車輪管理は不要です。これにより、機構変更時も上位プログラムの修正を最小限に抑えられます。
ロボットをカスタマイズ
車輪構成、ロボットのサイズ等の変更はMVC01を再設定するだけ
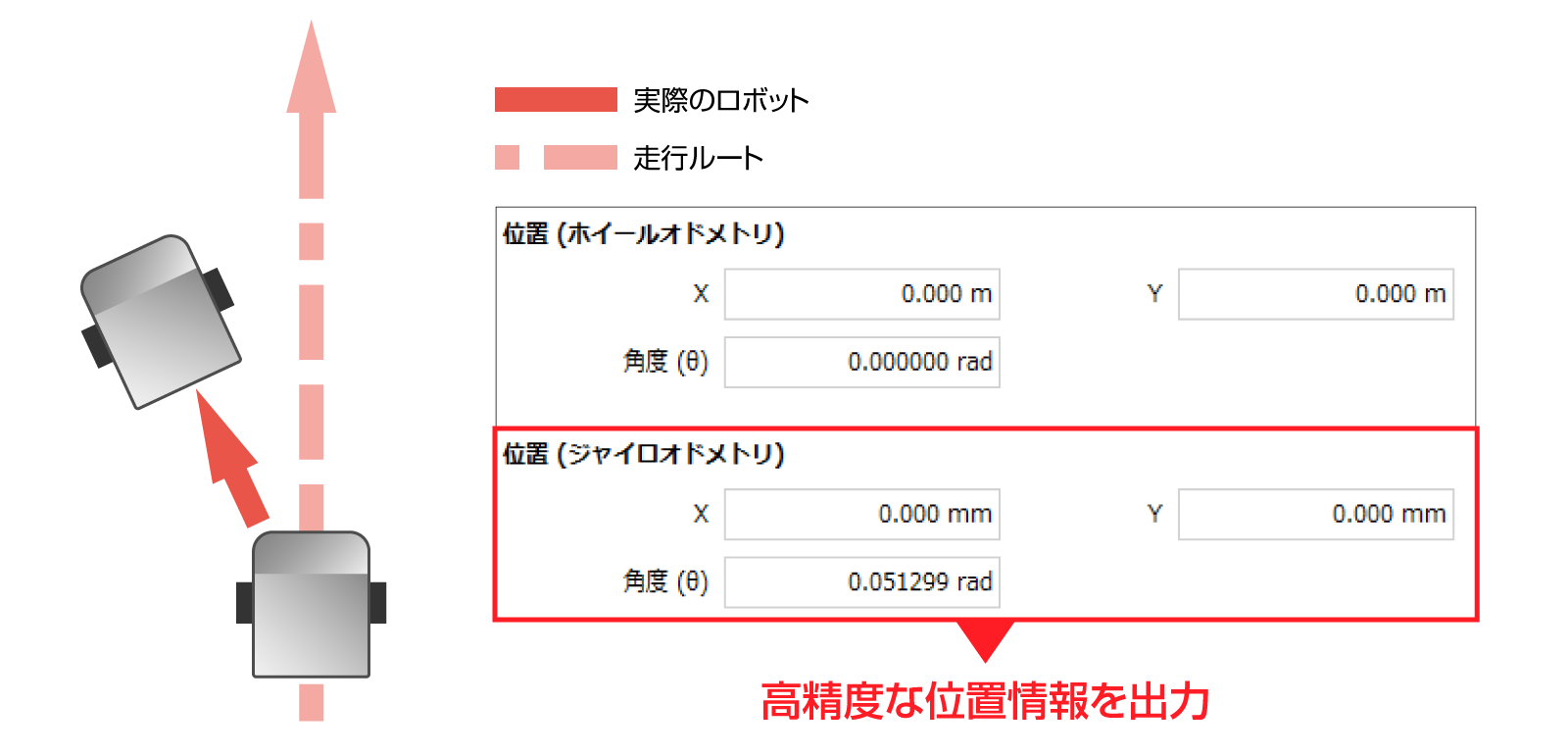
IMUによる正確な位置情報取得によりスリップを検知
モバイルロボットコントローラはIMUを搭載しているため、 ジャイロオドメトリで算出した位置情報を出力できます。
ジャイロオドメトリとは、IMUとモーターのエンコーダ情報から位置情報を推定する手法です。
不安定な場所を走行する場合、スリップによって実際のロボットと位置情報に誤差が生じやすくなりますが、IMUによって、より高精度な位置情報を出力できます。
慣性計測ユニット(IMU)
加速度センサとジャイロセンサを合わせたセンサ。
3次元の慣性運動(直交3軸方向の並進運動と回転運動)を検出する。

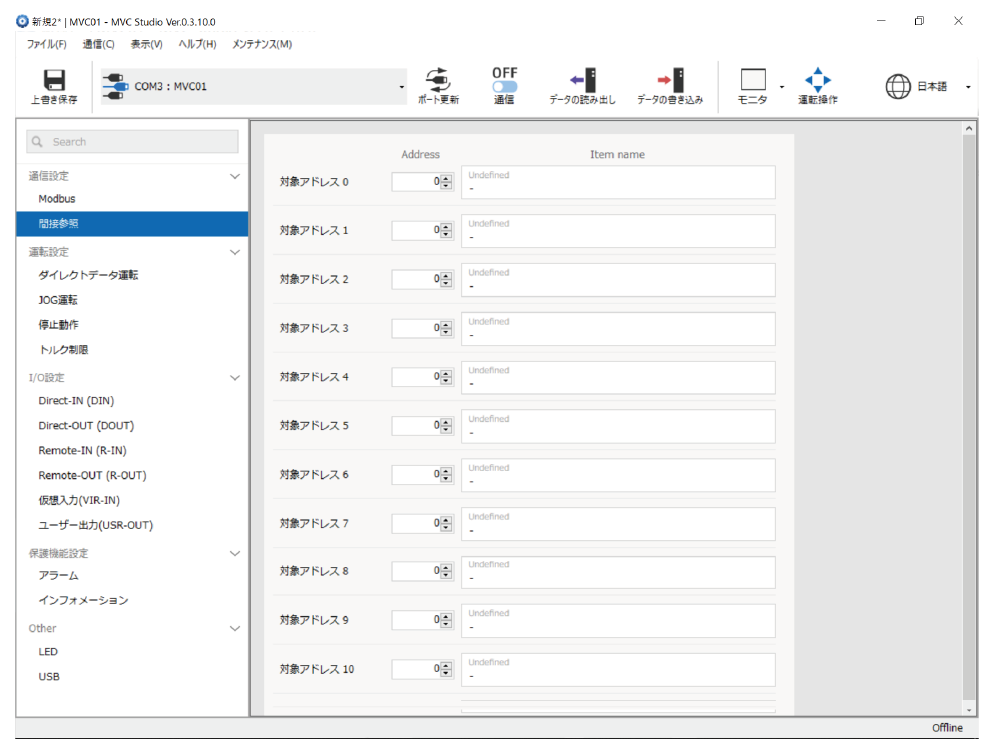
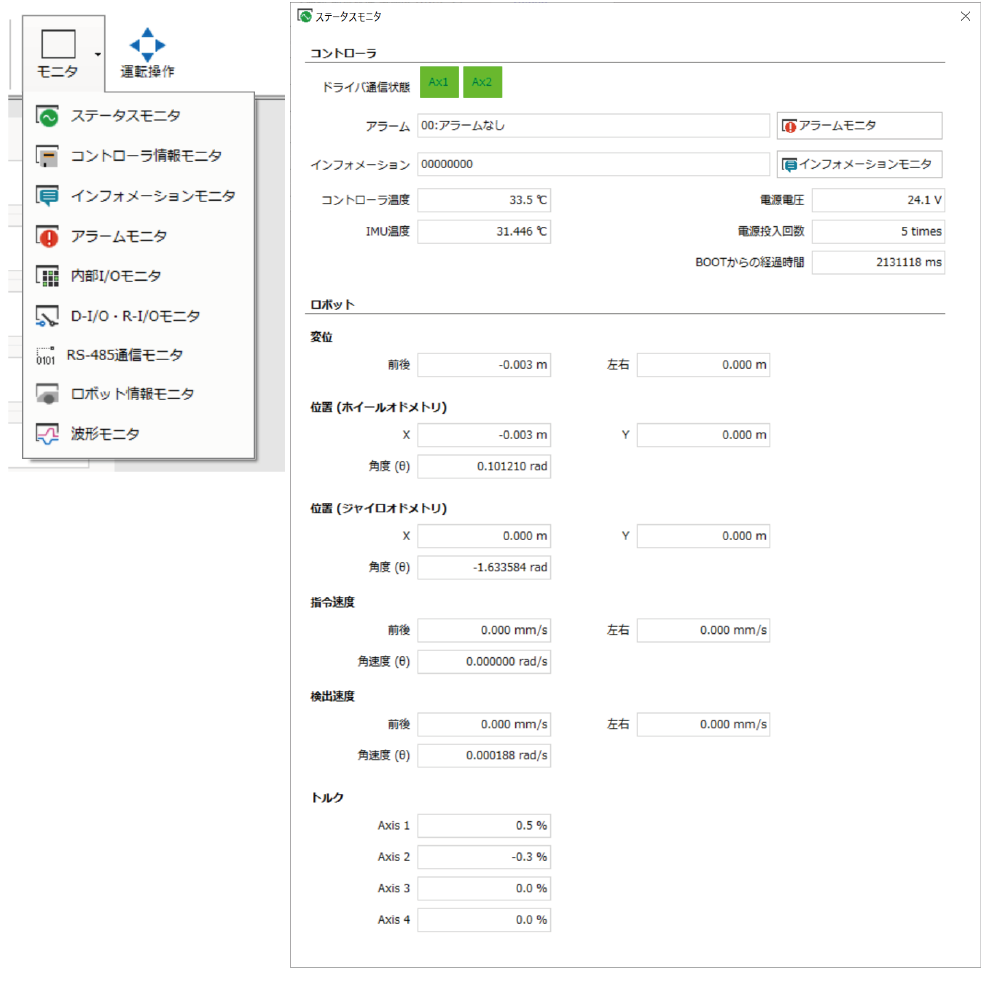
無料のサポートソフトMVC Studio
モバイルロボットコントローラの立ち上げからメンテナンスまでサポートするソフトウェアをご用意しています。各種パラメータの設定・編集が行えるほか、各種状態のモニタを行うことができます。ソフトは無料でダウンロードいただけます。

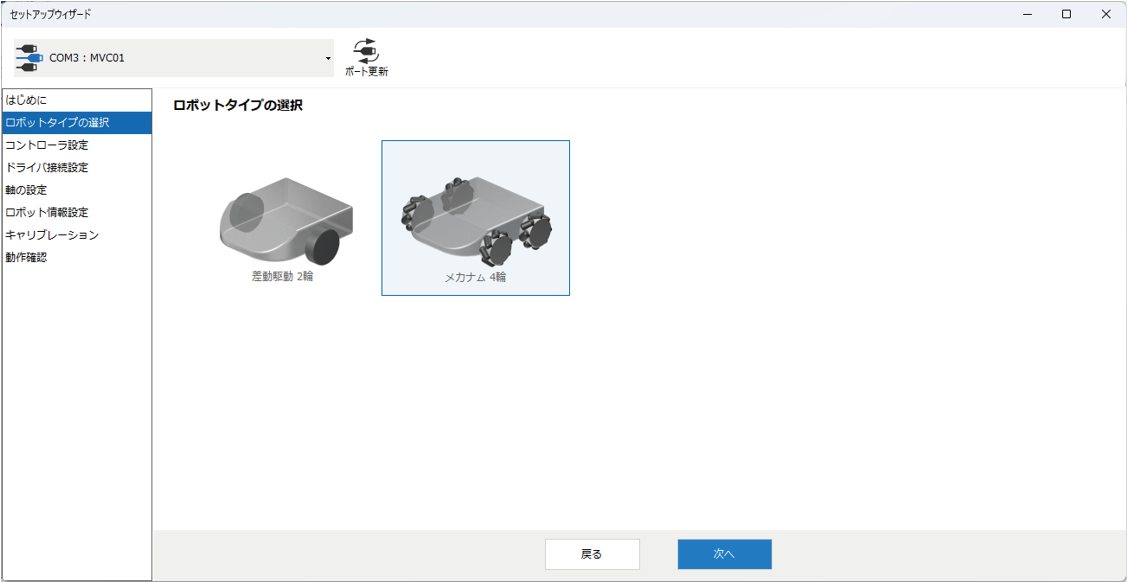
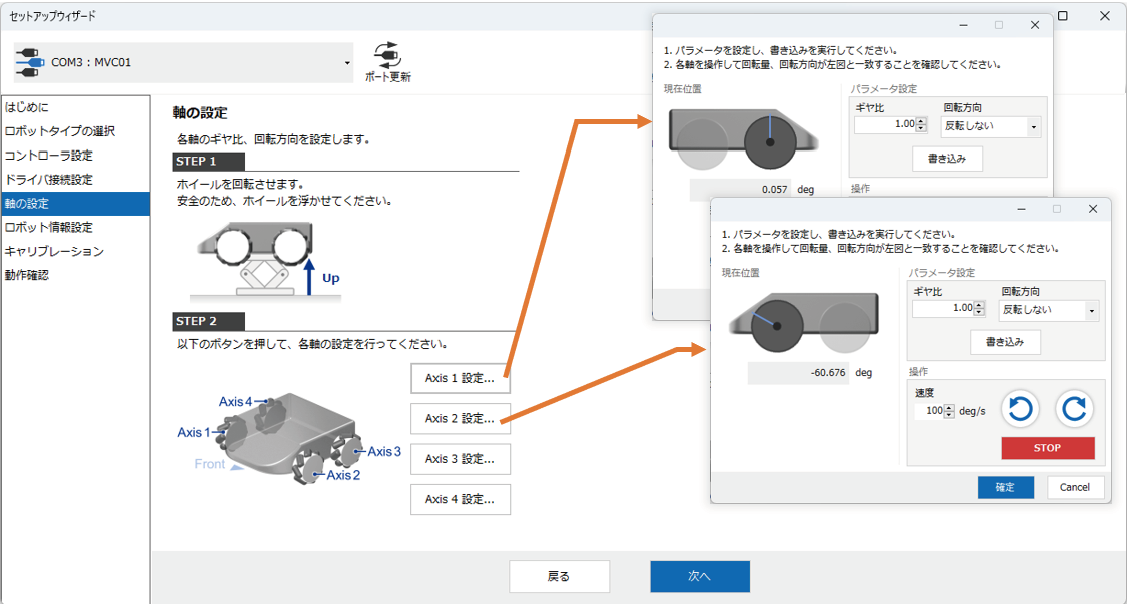
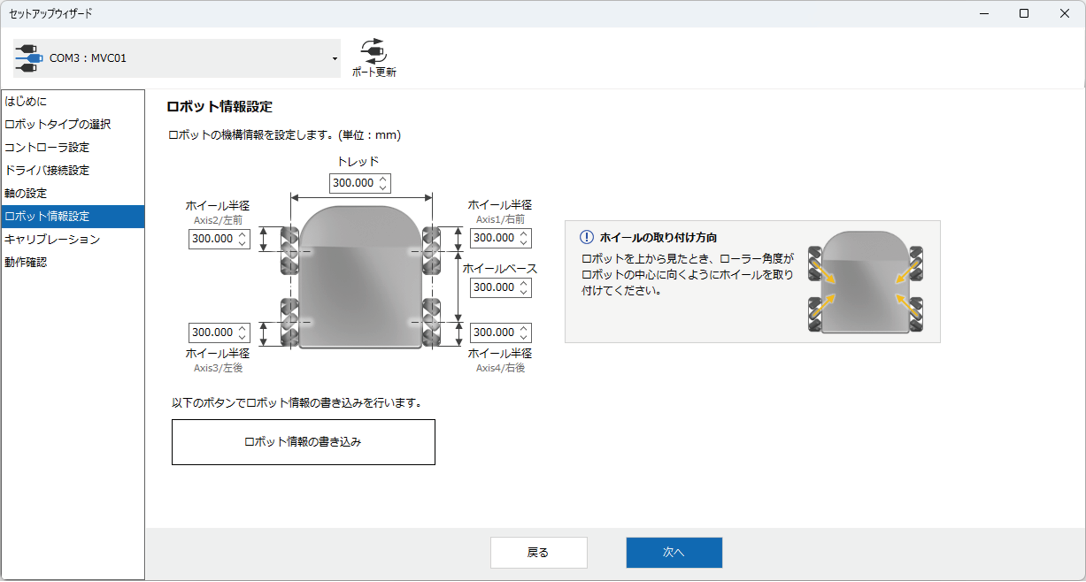
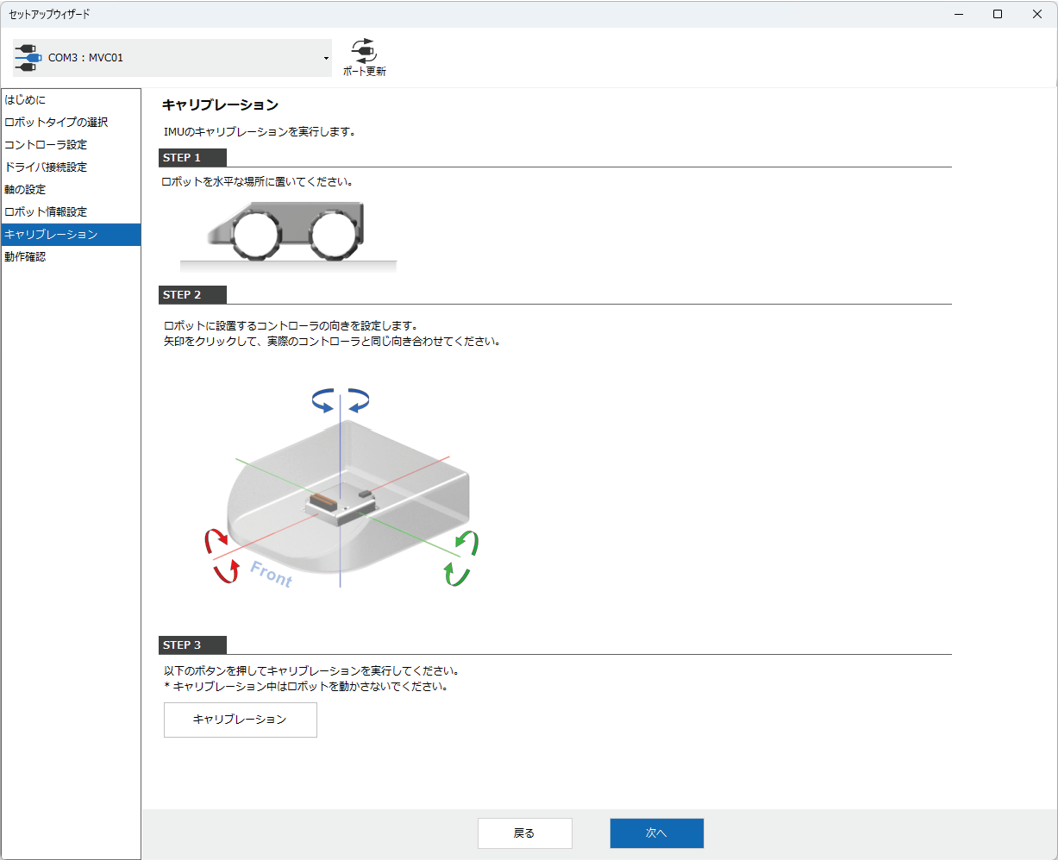
ガイダンスに従って、迷わず初期設定
駆動方式(2輪駆動、4輪駆動等)の選択や機構情報の入力など、一連の初期設定をウィザード形式でおこなえます。イラストを見ながらガイダンスの指示に従って設定することで、初めてでも短時間で設定できます。
手順に従って設定
ウィザードメニューに従ってロボットの初期設定をすすめます。

立ち上げ・メンテナンスに役立つパラメータ設定、モニタ機能
ROS 2対応
ROS 2(Robot Operating System 2)は、ロボット開発のためのオープンソースのミドルウェアフレームワークです。
ROS 2を使うことで、複雑な制御を簡単に構築でき、信頼性の高い通信やリアルタイム対応といったメリットがあります。
また、産業用ロボットや工程間搬送ロボット、サービスロボットなど幅広い分野で活用できます。
MVC01はROS 2に対応しています。
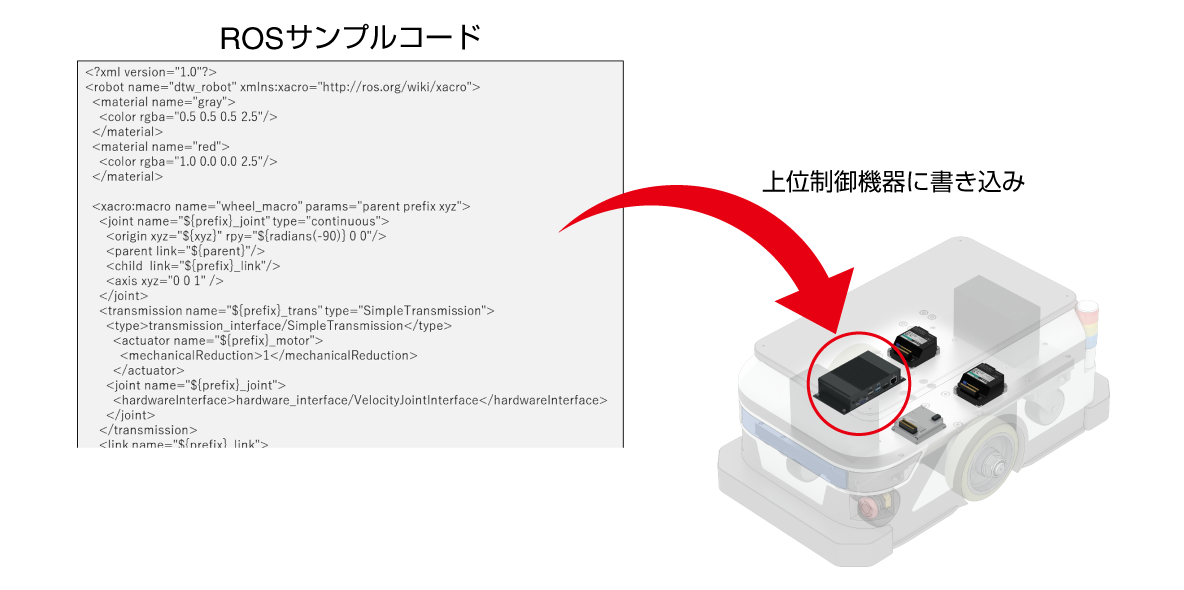
プログラム作成をサポート
初めてのROS制御に不安がある、プログラム設計の時間を短縮したいという場合には、モバイルロボットコントローラとの連携も含めたサンプルプログラムの作成もおこなっています。
プログラムサポート適応範囲
- MVC01に関する全般的な技術相談
- Raspberry Pi等で制御したい場合のOSを含めた環境構築のサポート(ROS環境含む)
- ゲームパッドを用いてMVC01を制御するサンプルコードの作成
- ※ 外界センサ(ライントレーサやLiDAR)を用いた自律走行のサポートはお受けいたしかねます。
- ※ プログラムサポートサービスの内容、費用については、こちらにお問い合わせください。
アプリケーション例
ROS 2を用いて構築した搬送ロボットの動作例をご紹介します。
| 自律走行 | ライントレース | 手動操作 | |
|---|---|---|---|
| 特徴 | 工場内の地図をもとに自己位置を推定し、自律走行。 障害物を回避しながら目的地へ搬送可能。 |
床面のビニールテープをカメラで認識し、設定されたルートに沿って安定走行。 | スマートフォン/タブレットアプリから遠隔操作で走行。試作や動作確認など柔軟な運用に対応。 |
| 導入コスト | 高 | 低~中 | 低~中 |
| 向いている現場・用途 | ・多品種少量生産 ・レイアウト変更が多い工場 ・人との協働環境 |
・長距離、重量物の搬送 ・搬送ルートが一定 ・整理された環境 |
・試作ライン ・柔軟な運用が必要な環境 |
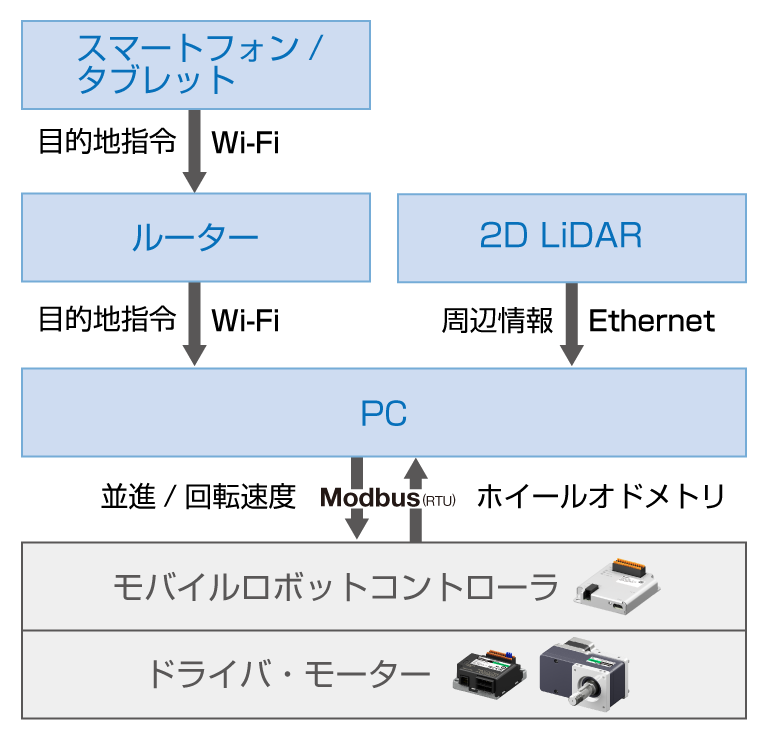
自律走行
障害物を回避しながら目的地まで自律走行
ライントレース
床面ラインに沿って安定して走行
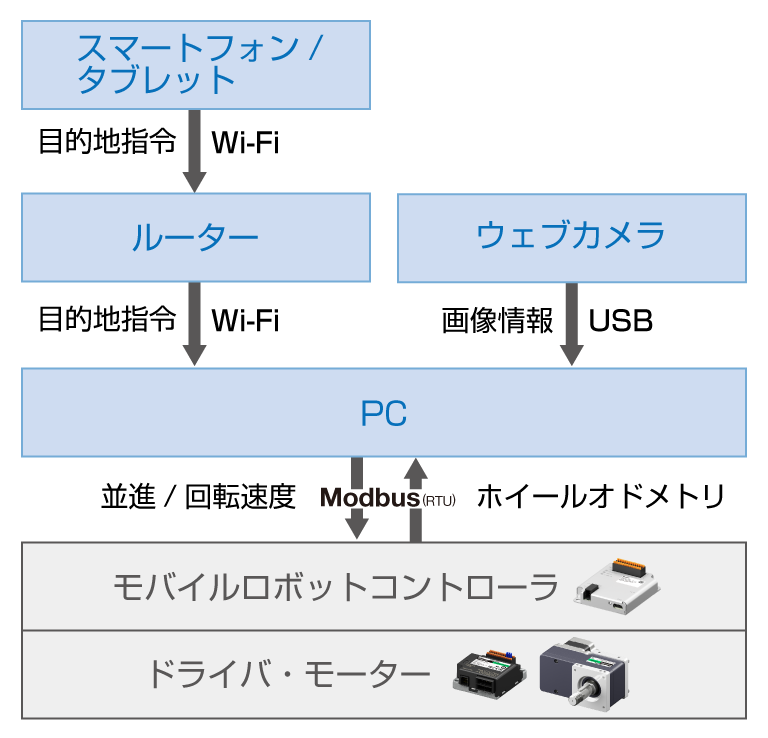
手動操作
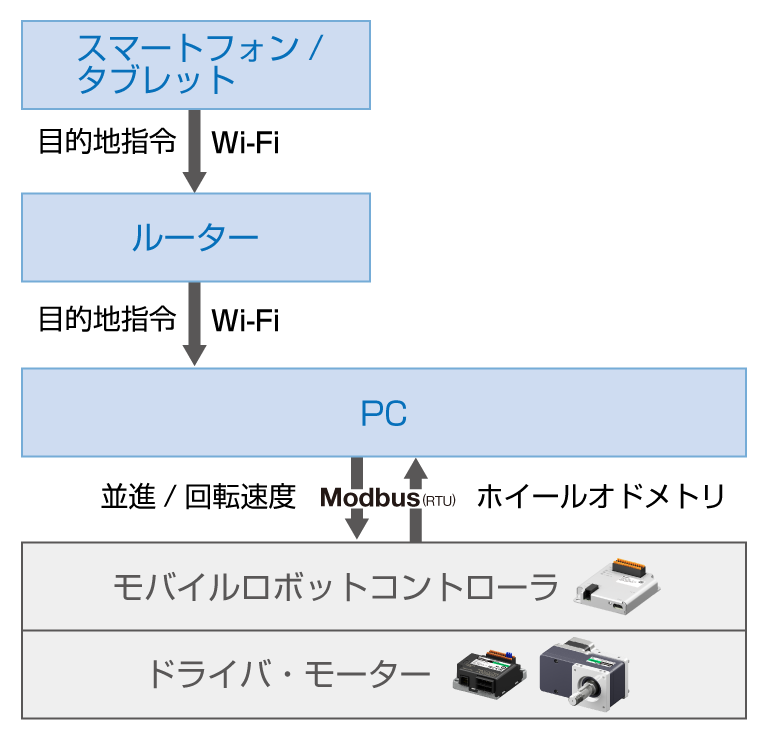
アプリ操作による遠隔走行
システム構成の比較
-
自律走行
-
ライントレース
-
手動操作
内製事例


組み合わせ製品
モーターは、ブラシレスモーターBLVシリーズRタイプ※と組み合わせることができます。
BLVシリーズRタイプには、車輪を直接取り付けできる駆動車輪用モーターもご用意しています。
- ※ 750 Wタイプは除きます。
ブラシレスモーター

製品を絞り込む

