小型ロボット OVR
4軸垂直多関節ロボット
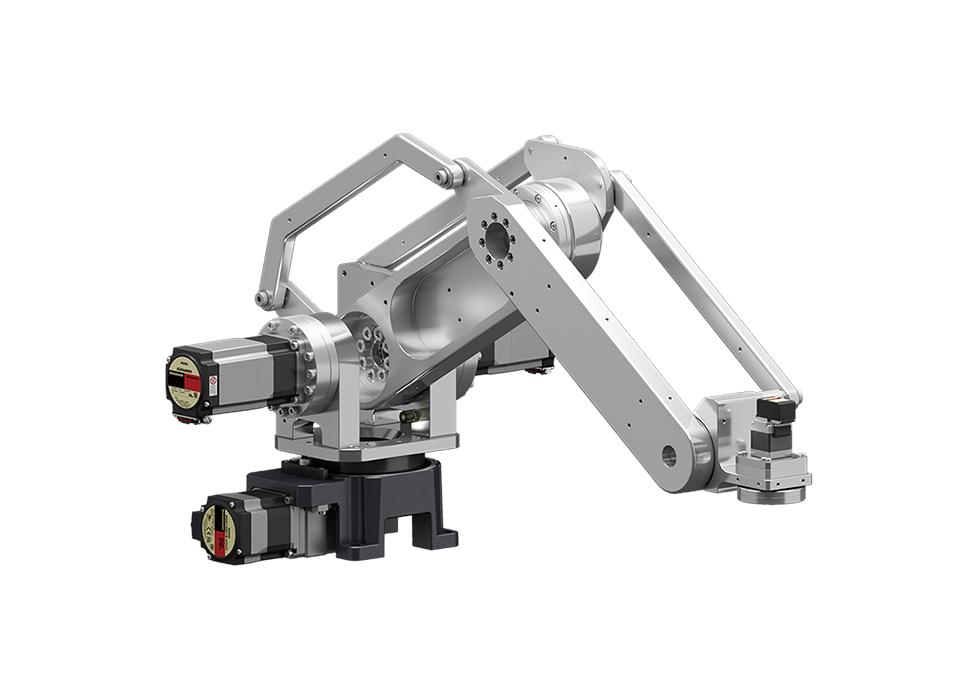
- 最大リーチ長(水平)480/680/880 mmの3タイプ
- 可搬質量 5 kg
- DC入力
- 部品を常時水平な状態で安定搬送
特徴 | 4軸垂直多関節ロボット
平行リンク機構による軽量化と安定した水平搬送
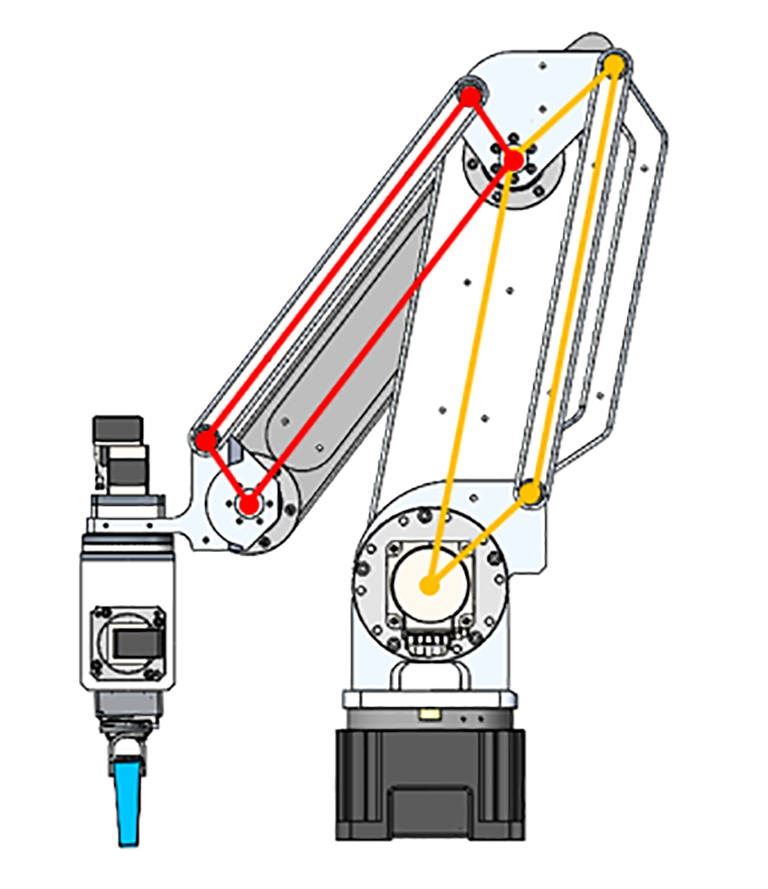
平行リンク機構のため、下記のメリットがあります。
- 最大可搬質量5kg:2つのアームを駆動するモーターを下に配置することで、関節部分の重量を軽量化し、実現しました。
- 水平搬送:ロボットアームの先端が設置面と機構的に常に水平を保つことができるため、安定した水平搬送ができます。
用途に合わせて選べるアーム長
| 品名 |
|
|

|
|
|---|---|---|---|---|
| 軸数 | 4軸 | |||
| 入力電圧 | DC24V | |||
| 最大リーチ長 | 垂直 | 570mm | 750mm | 900mm |
| 水平 | 480mm | 680mm | 880mm | |
| 可搬質量 | 5kg | |||
| 標準サイクルタイム*1 | 0.7sec | |||
| 可動範囲*2 | S軸(旋回) | ±170deg | ||
| L軸(下腕) | -27~+80deg | |||
| U軸(上腕) | -35~+58deg | |||
| R軸(手首旋回) | ±360deg*3 | |||
| 繰り返し位置決め精度*4 | ±0.05mm | |||
| 許容慣性モーメント(手首旋回軸) | 0.069kgm2 | |||
| 本体質量 | 16kg | 17kg | 18kg | |
| 設置形式 | 架台取付け | |||
| 定価 | 1,155,000円 | 1,260,000円 | 1,470,000円 | |
- *1:負荷1kg時、高さ25mm、幅300mmの2点間を往復させるのに要する時間です。当社ロボットコントローラ使用時のサイクルタイムです。
- *2:設置原点位置(0deg)を基準に±方向に動作できる範囲です。
- *3:当社ロボットコントローラ使用時の仕様です。
- *4:各軸減速機の仕様値に基づきます。
- *推奨電源容量DC24V 500W
カスタム可能

購入時に、お客様の用途に合わせてアームの長さをカスタマイズすることが可能です。(リーチ長変更 580mm、780mm)
ダウンタイムを抑えるメンテナンス性
ユーザーメンテナンス可能

各軸に採用しているAZシリーズモーター/中空ロータリーアクチュエータDGⅡシリーズは、お客様自身で交換が可能です。メーカー修理を待つことなく対応できるため、トラブル発生時のダウンタイムを抑えることができます。
- ※ 当社でも保守・メンテナンス時のモーター交換をおこなっています。最寄りの支店・営業所までお問い合わせください。
バッテリレスアブソリュートセンサ搭載AZシリーズを採用

全軸にαSTEP AZシリーズを採用。
バッテリレスアブソリュートセンサを搭載しているため、定期的なバッテリ交換が不要です。交換忘れや作業ミスによる位置情報消失のリスクを低減し、安定稼働と保守負担の軽減に貢献します。
かんたんに制御できるロボットコントローラ
PLC/IPCから直接制御、既存設備とスムーズに連携
ロボットコントローラと上位システムとの連携は、EtherNet/IP™でダイレクト制御。既存の設備の制御システムを大きく変更せずに、小型ロボット OVRを追加導入できます。また、上位システムに依存しないスタンドアロン構成(I/O接続)にも対応しており、用途に応じた最適なシステム構築が可能です。
DC入力により、電源ラインの引き回しも容易で、ラインへの設置やレイアウト変更にも柔軟に対応できます。
- ※ 産業用ロボットとしての安全に配慮してご使用ください。

構成価格例
| 品名 | 数量 | 定価 | 小計 | |
|---|---|---|---|---|
| ロボット | OVR4048K5-V | 1 | 1,155,000円 | 1,155,000円 |
| ロボットコントローラユニット | MRCU4AK | 1 | 437,800円 | 437,800円 |
| 接続ケーブル(3 m) | CCM030Z1EFF | 1 | 8,700円 | 8,700円 |
| CCM030Z1EFR | 2 | 13,500円 | 27,000円 | |
| CCM030Z2AAR | 1 | 11,200円 | 11,200円 | |
| 電源ケーブル | CC09MRCU030 | 1 | 28,600円 | 28,600円 |
| ロボット送料 | 16,000円 | 16,000円 | ||
| 合計 1,684,300円 | ||||
- ・この他にDC電源とエンドエフェクタが必要になります。
- ・駆動に必要なケーブル品名はツールでご確認ください。
アイコンを選ぶだけで誰でもロボットプログラミング
初期設定から動作プログラムまで、かんたんに設定できる「プログラミングソフトMRC Studio」をご用意しています。
ウィザード形式のセットアップとアイコン操作により、ロボットプログラムの経験がない方でもスムーズに導入できます。
- 運転プログラム:最大64個作成可能
- コマンド:1プログラムあたり最大128個配置可能
- プログラム実行:EtherNet/IPまたは入力信号
-
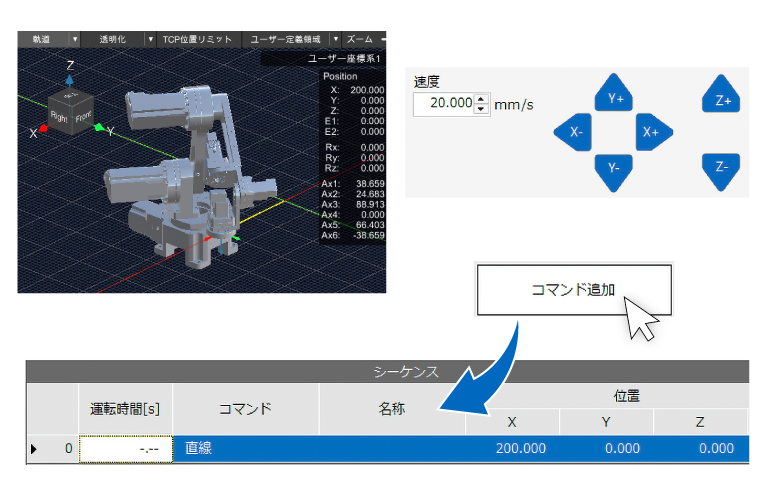
STEP1 位置を決める
X、Y、Zボタンでロボットを動かし、目的の位置を登録
-
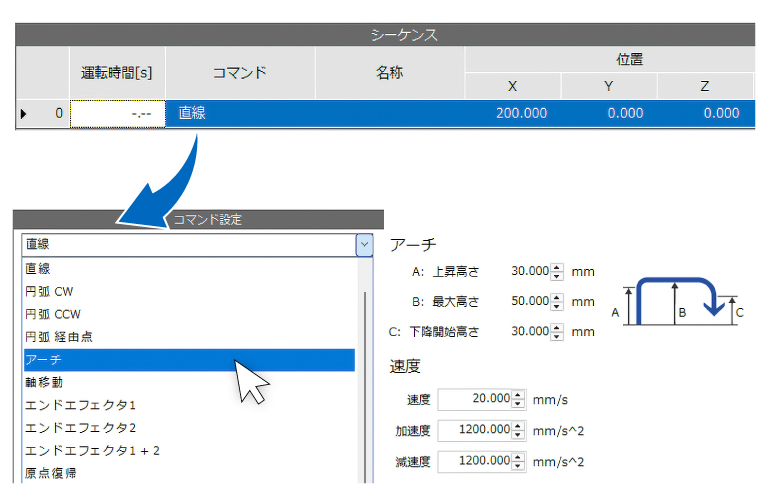
STEP2 動き方を選ぶ
速度や動作形式を選択し、ポイント間の動き方を設定
-
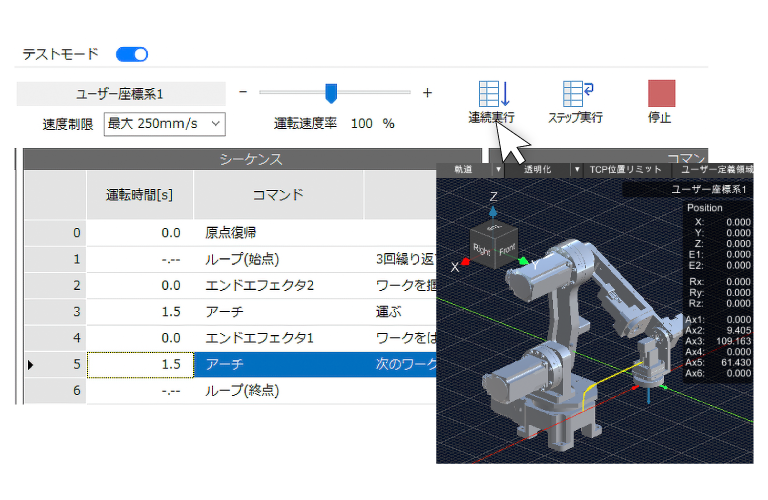
STEP3 動作を確認する
テストモードで、プログラムした動作をすぐに確認
ロボット導入前にシミュレーションが可能なソフトウェア
MRC Studio Simulator

MRC Studio Simulator は、ロボット本体やロボットコントローラがなくても、実際の動きを想定したシミュレーションが可能なソフトウェアです。MRC Studio Simulatorで作成したプログラムは本体導入時に流用することも可能です。
MRC Reality

実空間にバーチャルロボットを設置して、操作シミュレーションが可能です。
実際にロボットを設置したい場所でお試しいただくことで、ロボットアームの動き、設置した際のサイズ感や可動に必要なスペースを視覚的に確認できます。
スマートフォン/タブレット用、ヘッドマウントディスプレイ(Meta Quest 3)用のアプリをご用意しています。
製品詳細情報
仕様、特性、外形図、CAD、取扱説明書などの製品情報の詳細については、下記の品名リンクよりご確認ください。
OVR4048K5-V(最大リーチ長 480 mm)
OVR4068K5-V(最大リーチ長 680 mm)
OVR4088K5-V(最大リーチ長 880 mm)
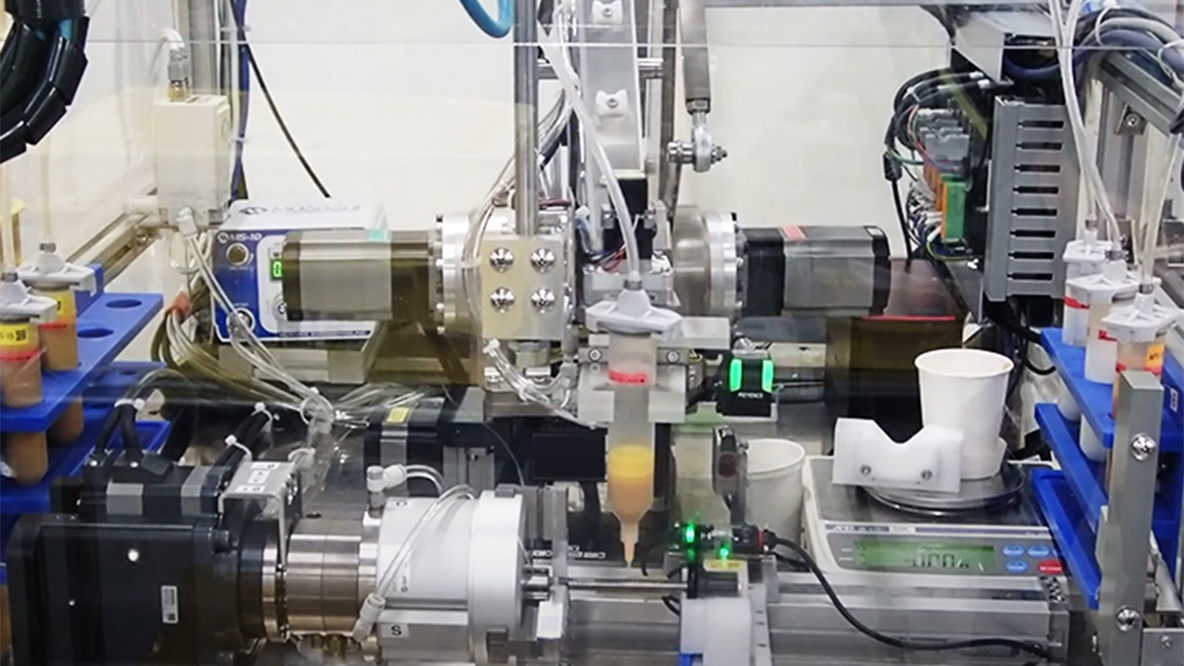
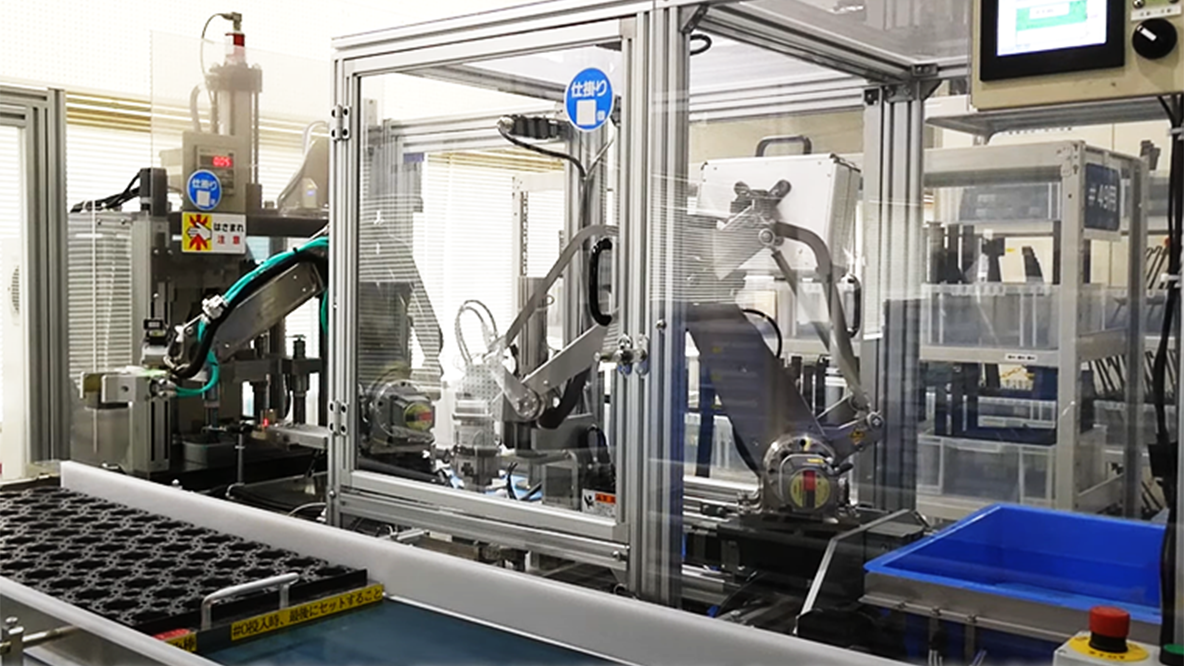
採用事例
小型ロボットOVRはコンパクト設計のため、限られたスペースでも柔軟に設置でき、生産ラインの改修コストを抑えられます。また、人がおこなっている単純な繰り返し作業を自動化することで、作業効率の向上や人手不足の解消に貢献します。
周辺機器
4軸垂直多関節用手首曲げ軸取付金具
リンク機構によりアーム先端は常に下を向いているため、ピックアンドプレイスをさせるには4軸だけの制御で使用できます。
ただし、手首上げ下げの要素がないと使いにくいという事例も多くあります。
「手首曲げ軸取付金具」はその課題を解決するツールです。
用途例
- 電動グリッパを90度持ち上げて棚からワークを掴み、梱包箱に入れる。
- ワークを取り上げて背面の画像を撮影してから箱詰めする。
- バイト、トーチを少し傾けて作業する。



