ロボットから選ぶ-垂直多関節の駆動部
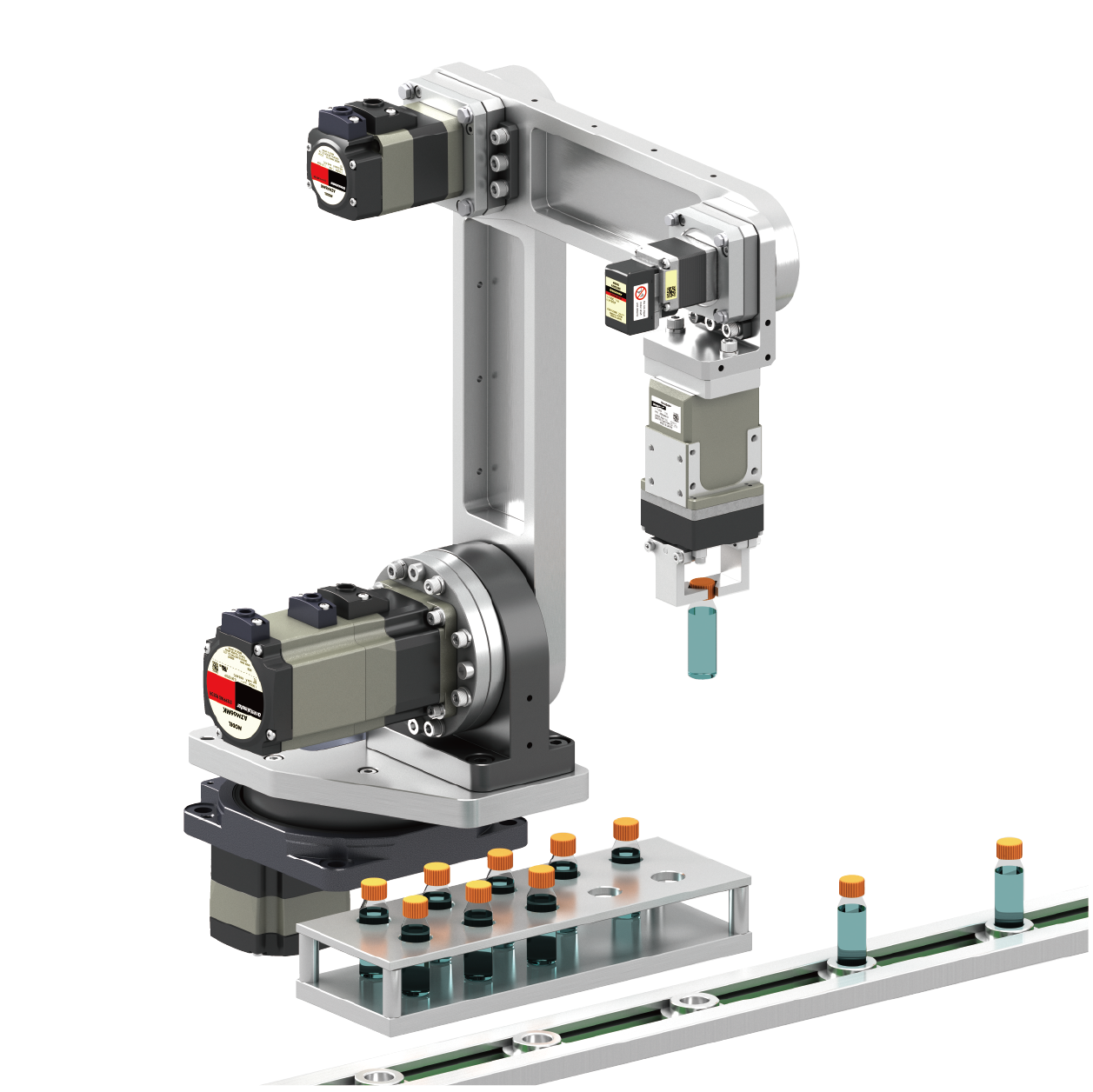
AZシリーズ、AZシリーズ搭載アクチュエータで垂直多関節ロボットを設計する際に、最適な製品をご案内します。
運転条件
以下の運転条件でモーター/電動アクチュータを選びます。
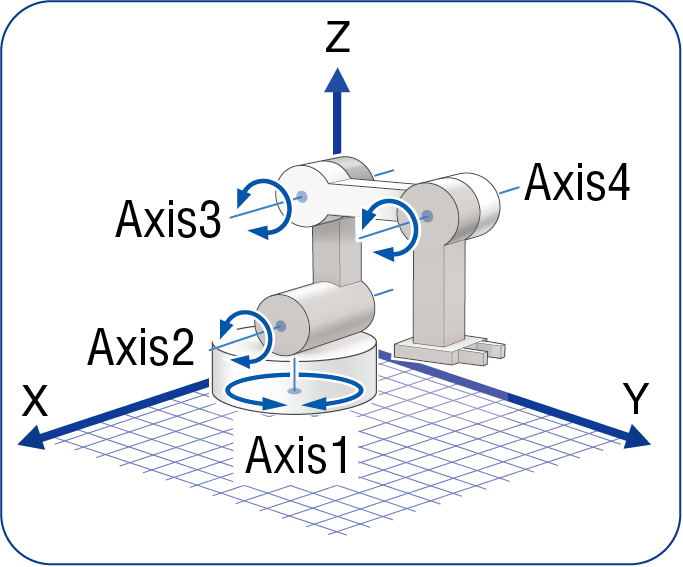
| ロボットモデル | 可動範囲(リンク長) | 電源⼊⼒ |
|---|---|---|
| 垂直多関節 3リンク ベース旋回 | Y:175mm Z:385mm(100mm) | DC24V |
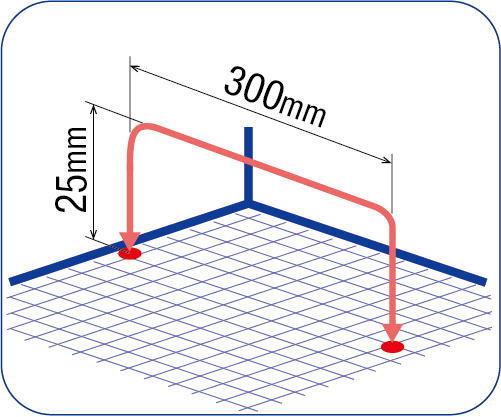
●標準サイクルタイム
標準サイクルタイム(参考値)は、搬送質量1kgで、上下25mm、水平300mmの往復動作に必要な時間です。
搬送質量:4.5kg、標準サイクルタイム:2.23sの一覧を見る
| STEP1 | STEP2 | モーター/電動アクチュータ | ||
|---|---|---|---|---|
| 搬送質量を選ぶ | 標準サイクルタイムを選ぶ | 軸 | 品名 | 定価 |
| 4.5kg | T=2.23s | Axis1 |

|
229,900円 |
| Axis2 |

|
151,800円 | ||
| Axis3 |
|
151,800円 | ||
| Axis4 |

|
96,400円 | ||
搬送質量:2.4kg、標準サイクルタイム:2.41sの一覧を見る
| STEP1 | STEP2 | モーター/電動アクチュータ | ||
|---|---|---|---|---|
| 搬送質量を選ぶ | 標準サイクルタイムを選ぶ | 軸 | 品名 | 定価 |
| 2.4kg | T=2.41s | Axis1 |

|
211,800円 |
| Axis2 |

|
151,800円 | ||
| Axis3 |

|
113,300円 | ||
| Axis4 |

|
92,300円 | ||
搬送質量:0.9kg、標準サイクルタイム:1.29sの一覧を見る
| STEP1 | STEP2 | モーター/電動アクチュータ | ||
|---|---|---|---|---|
| 搬送質量を選ぶ | 標準サイクルタイムを選ぶ | 軸 | 品名 | 定価 |
| 0.9kg | T=1.29s | Axis1 |
|
211,800円 |
| Axis2 |
|
151,800円 | ||
| Axis3 |

|
113,300円 | ||
| Axis4 |

|
92,300円 | ||
搬送質量:0.5kg、標準サイクルタイム:1.61sの一覧を見る
| STEP1 | STEP2 | モーター/電動アクチュータ | ||
|---|---|---|---|---|
| 搬送質量を選ぶ | 標準サイクルタイムを選ぶ | 軸 | 品名 | 定価 |
| 0.5kg | T=1.61s | Axis1 |

|
205,700円 |
| Axis2 |
|
113,300円 | ||
| Axis3 |
|
113,300円 | ||
| Axis4 |
|
92,300円 | ||
ドライバの一覧を見る


ロボットコントローラ MRC01

「初期設定」「動作プログラミング」「動作確認」の3ステップで、自作ロボットをかんたんに導入・制御できるロボットコントローラです。 AZシリーズ/AZシリーズ搭載 電動アクチュエータと接続することができます。
詳細はこちら
アプリケーション事例
当社で内製した装置の事例/装置の課題に対する具体的なソリューション事例をもとに、当社製品の選び方・活用方法について、イラストや動画を用いてわかりやすくご紹介します。
詳細はこちら



設計支援
お客様の「装置立ち上げ時間の短縮」に貢献します。
内製ロボット
内製ロボットを搭載した装置の設計資料をダウンロードしていただけます。
詳細はこちら

小型ロボット OVR
オリエンタルモーターでは、AZシリーズを搭載した小型ロボットを販売しています。
詳細はこちら
