AZシリーズでスカラロボットの動きをさせてみた!(狭い隙間の位置決め)
やってみた!
~ キネマティクス演算(ロボット演算)なしでここまで動かせる! ~
AZシリーズでスカラロボットのようなデモ機をつくりました。厳密にはスカラロボットのアーム部分ですが、PLCからロボットの様な動きをさせてみました。
システム構成
上位制御
三菱製 FX5UC-32MT/D Modbus(RTU)
使用製品
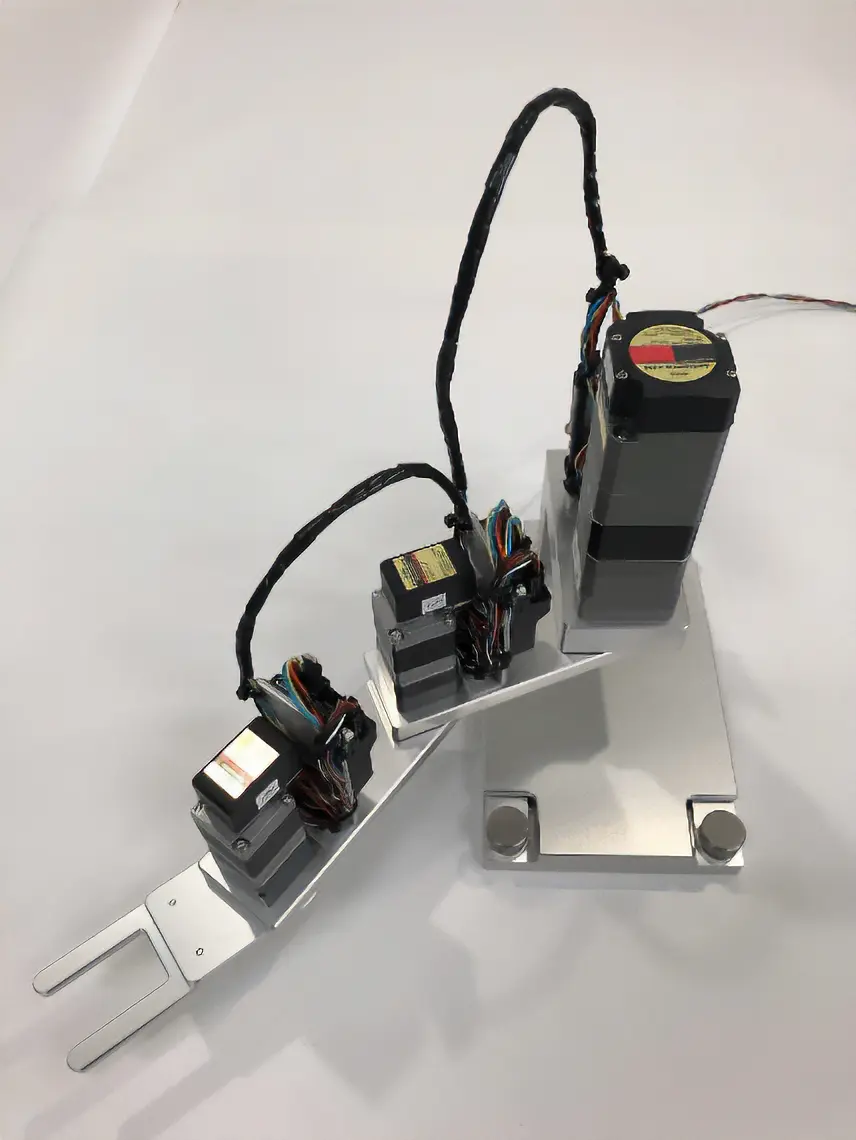
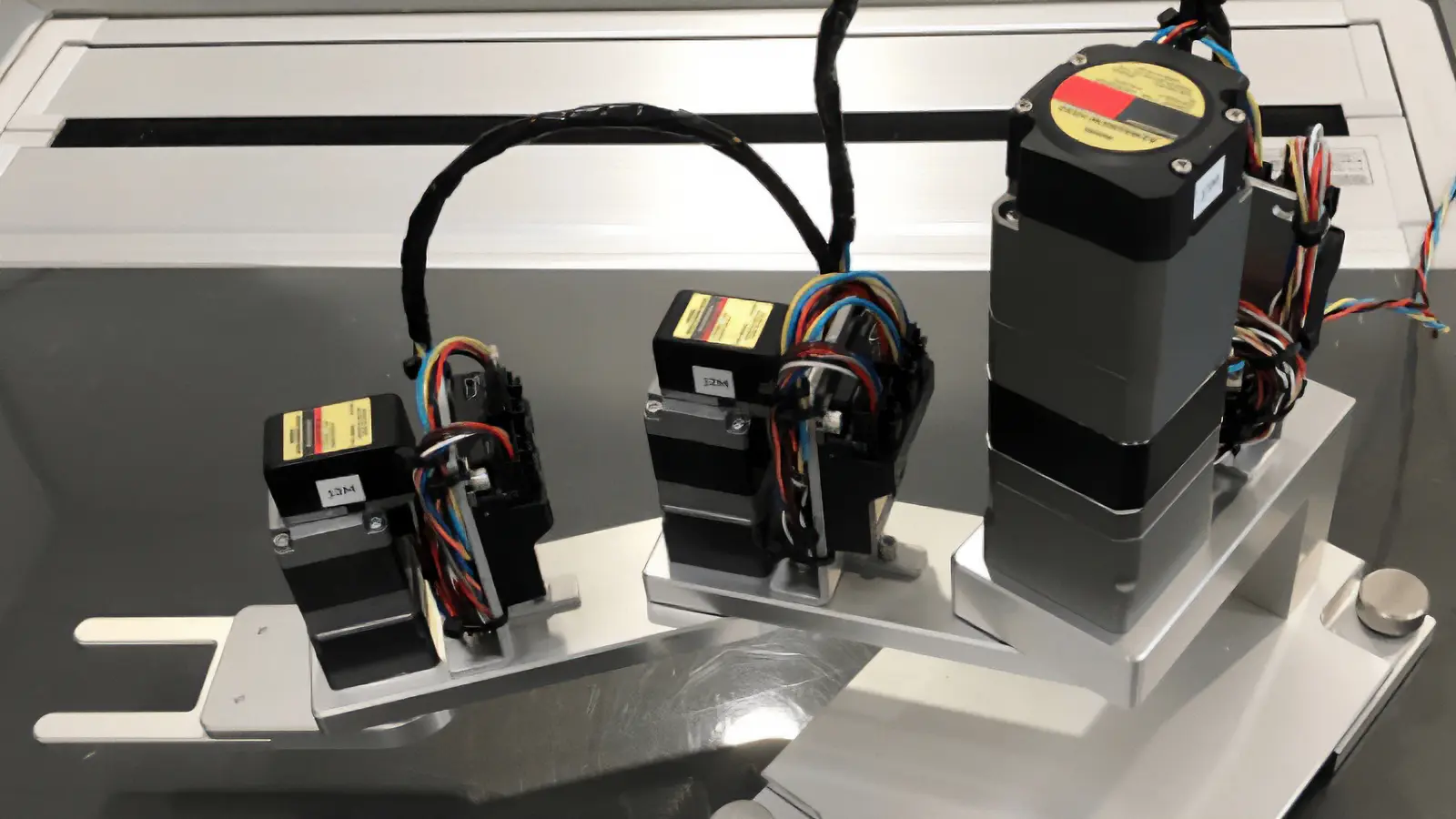
AZM46MKW-HS50、AZM24AKW-HS50×2、AZD-KRD×3
3関節で、各モーター中心間の距離は100mm、全長400mmで高さは208mmです。Modbus(RTU)のRS-485通信なので、どこまで同期した動きで正確な位置決めができるか試してみました。
アームの旋回速度は39deg/s、アームの伸縮速度が51mm/s、3つの軸が連動して1動作あたり2.5秒で動作します。
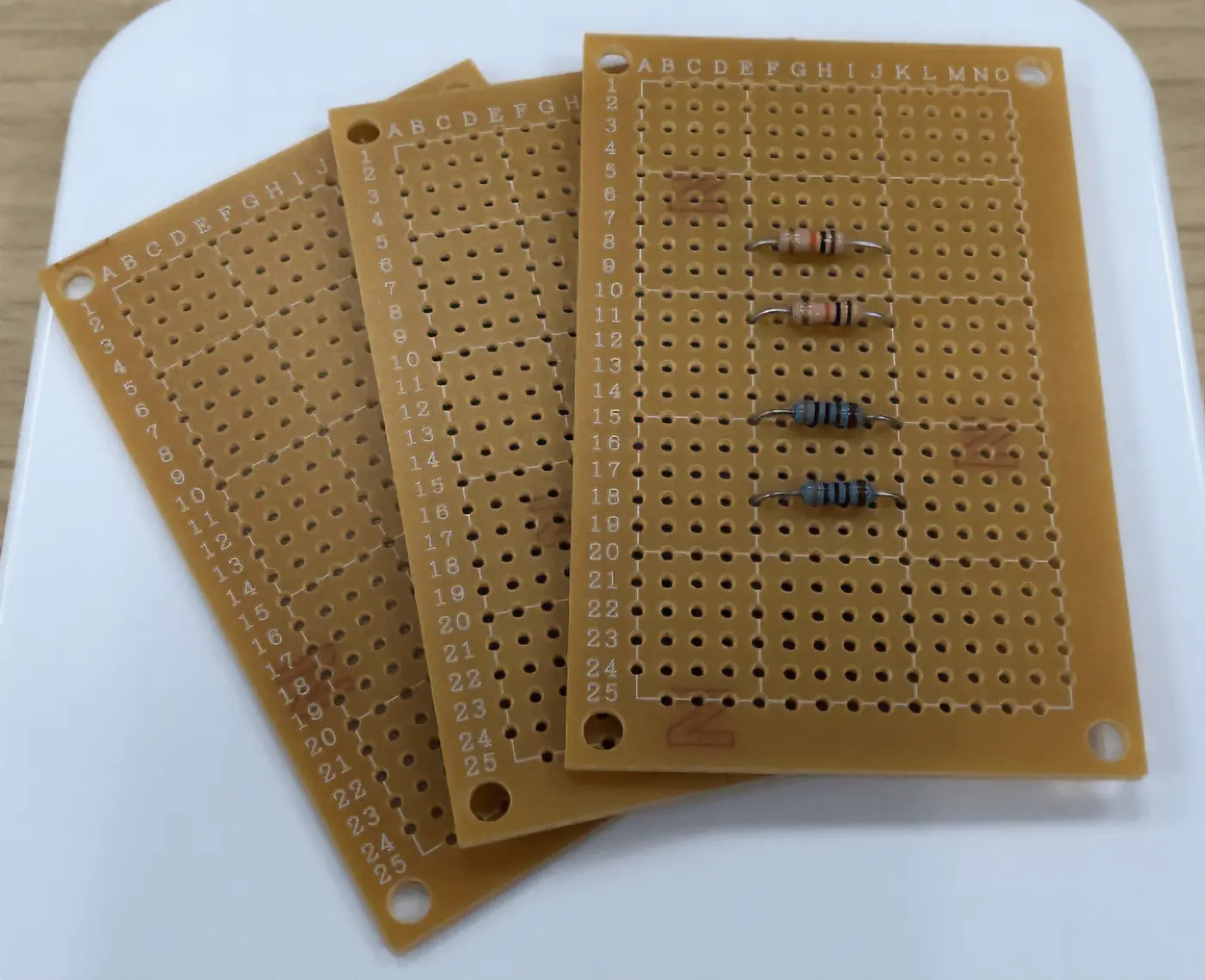
狭い隙間も、アームが左右の障害物に干渉せずに伸縮できることが確認できました。15分程度繰り返し運転させましたが、問題ありませんでした。
速度は変えずに、3つの軸が連動して1動作あたり2.5秒動作です。
こちらも左右の障害物に干渉しないで、アームの伸縮が確認できました。基板同様に15分程度、繰り返し運転させても、ワークの落下や障害物の衝突はありませんでした。
実機動作は、ほぼロボット動作です。各軸も同期して動いているように見えます。移動量と速度を、アームの先端から1対2対1の比率にして、移動時間を合わせると、きれいに動きます。
Modbus通信には、グループ送信機能があり、各軸の遅延を極力抑える機能があります。この機能を使う時は、レスポンスは返ってこないのですが、同期性重視には使えます。なおグループ送信不要時は、通信設定オフにしておけば、各軸毎のレスポンスは返ってきます。
ちょっとした自働化のヒントになれば幸いです。
追加で、このスカラデモ機で最速運転時にアームのブレがないのか実験してみました。2つの障害物の間にアーム先端を伸ばしています。
アームの旋回速度は133deg/s、アームの伸縮速度が189mm/s、3つの軸が連動して1動作あたり1.5秒で動作します。
障害物との隙間は約1mm。動画は2回だけですが、約10分(40回程度)繰り返しましたが、干渉しませんでした。
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品