電動グリッパEHシリーズを使って、自在に把持力変えてみた!
やってみた!
~電動グリッパは把持位置と把持力の細かな調整が得意なのです。~
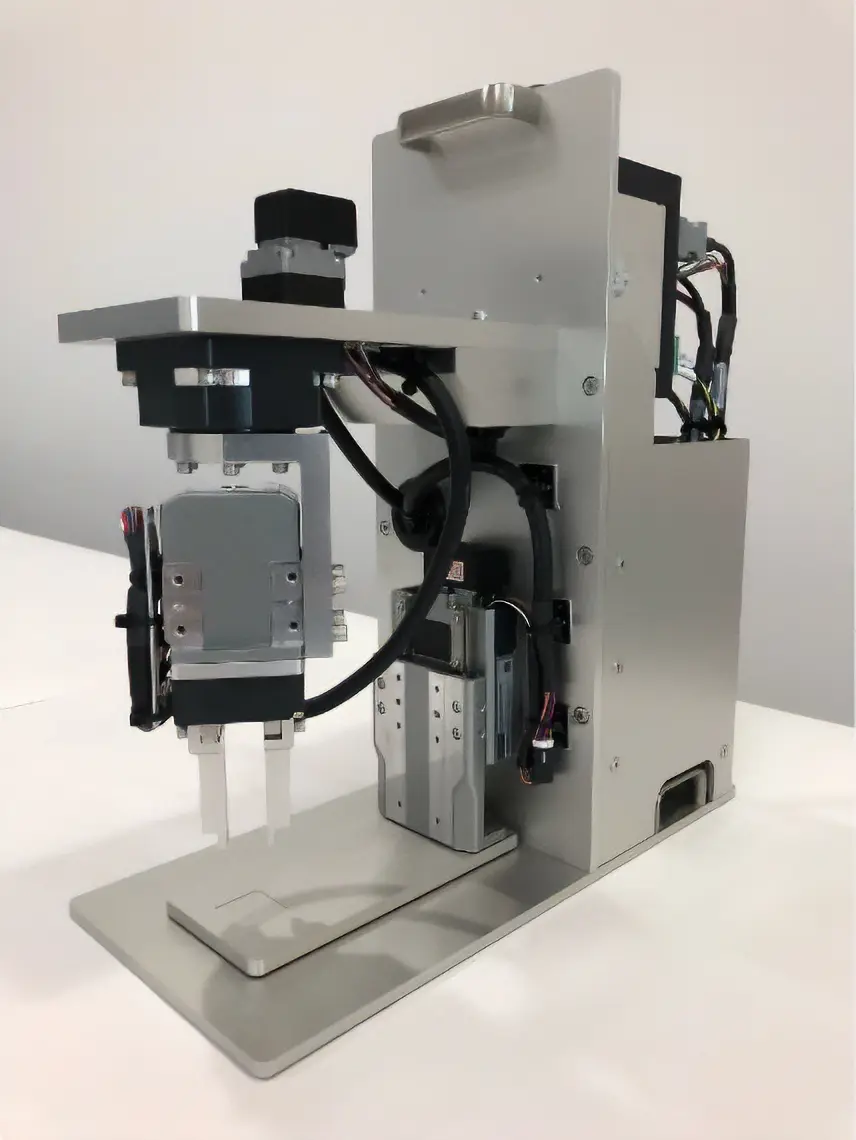
ロボット先端をイメージした卓上小型デモ機をつくりました。
デモ機の高さ:約340mm、幅:約140mm。把持できるワーク幅は20mm程度。
ノートPCから、RS-485通信のModbus(RTU)でモーター各軸を制御しています。
EHシリーズは把持位置や把持力を細かく設定できます。
最小移動量は片側0.01mmで、運転電流設定は0.1%単位。
最大把持力は25N。運転電流75%でこの上限値に達します。
一方で最小把持力は参考値ながら7N。運転電流20%ぐらいが下限値です。
仕様として、繰り返し位置決め精度が±0.02mm、バックラッシは片側0.1mm。
実力のほどを実機で試してみました。
システム構成
使用製品
DGM60-AZAK、EH4-AZAKH、DR28W2.5BC03-AZAKL、AZD-KD×3
実機確認①:ウレタンをつかんで、しかも把持力を変えてみる。
把持力の違いがわかる変形しそうなワークとして、ウレタン素材を選択。
動作パターンは、
ステージ上昇→ワーク把持(運転電流8%)→ステージ下降→
→180度旋回→2段階で把持強め(運転電流12%→20%)→把持弱め(運転電流8%)→
→ -90度ずつ回転→ステージ上昇→ワークを離す→ステージ下降
画像のグラフは、180度旋回後の運転電流の変化を示しています。
運転電流が変わると、ウレタンの変形具合から把持力の変化がわかります。
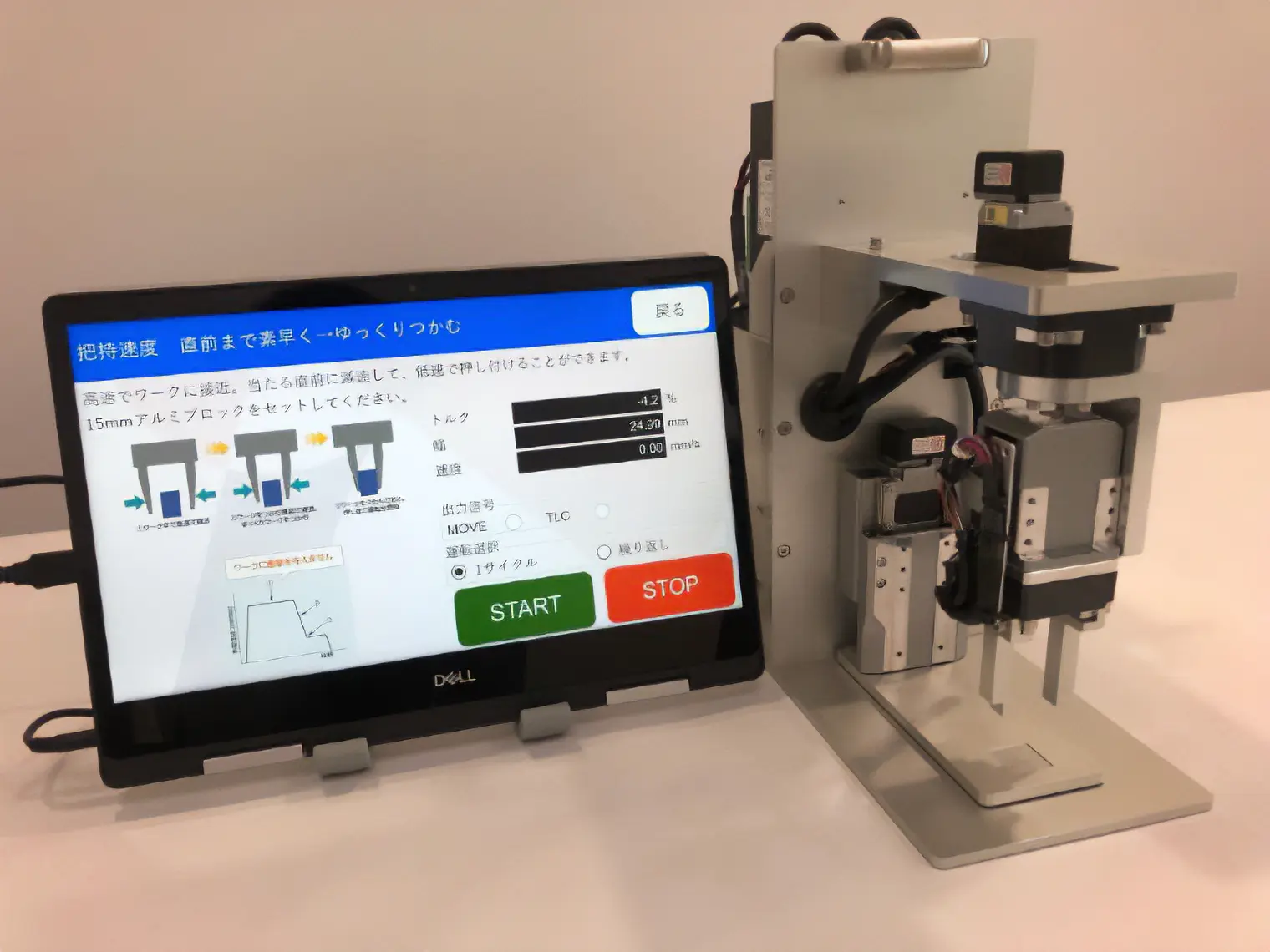
実機確認②:アルミキューブを直前にゆっくり掴む。
速度変化がわかるように15mm幅のアルミキューブを用意しました。
動作パターンは、
ステージ上昇→ワーク把持(高速→低速)→ステージ下降→
→180度旋回→ -90度ずつ回転→ステージ上昇→
→ワークを離す(低速→高速)→ステージ下降
180度旋回は、しっかりと把持しているところを見せたかったのです。
そしてオマケでやってみました。
実機確認③:うずら卵の模型をトルク弱めでおそるおそる掴んでみる。
模型ですが、強く持つとへこんだり割れます。
運転電流を8%ぐらいまで下げてから繰り返し実験しましたが、
10%ぐらいがちょうどよい把持でした。
今回は、EH4-AZAKHを使いましたが、
これよりも把持力小さめの、ひとまわり小型のEH3-AZAKHもあります。
この電動グリッパ、使ってみる価値はありそうでは?
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品