BLVシリーズRタイプを使って、2輪駆動と3輪駆動AGVデモ機を走らせてみた!
やってみた!
~2種類のAGVデモ機を使って、速度安定性と制御性を確認してみました。~
AGV/AMRを想定した搬送ロボット車輪部分に、BLVシリーズRタイプを使ったデモ機を2種類用意しました。
両方とも3輪車ですが、①モーター2台を使った2輪駆動デモ機、②モーター3台使用の3輪駆動デモ機です。
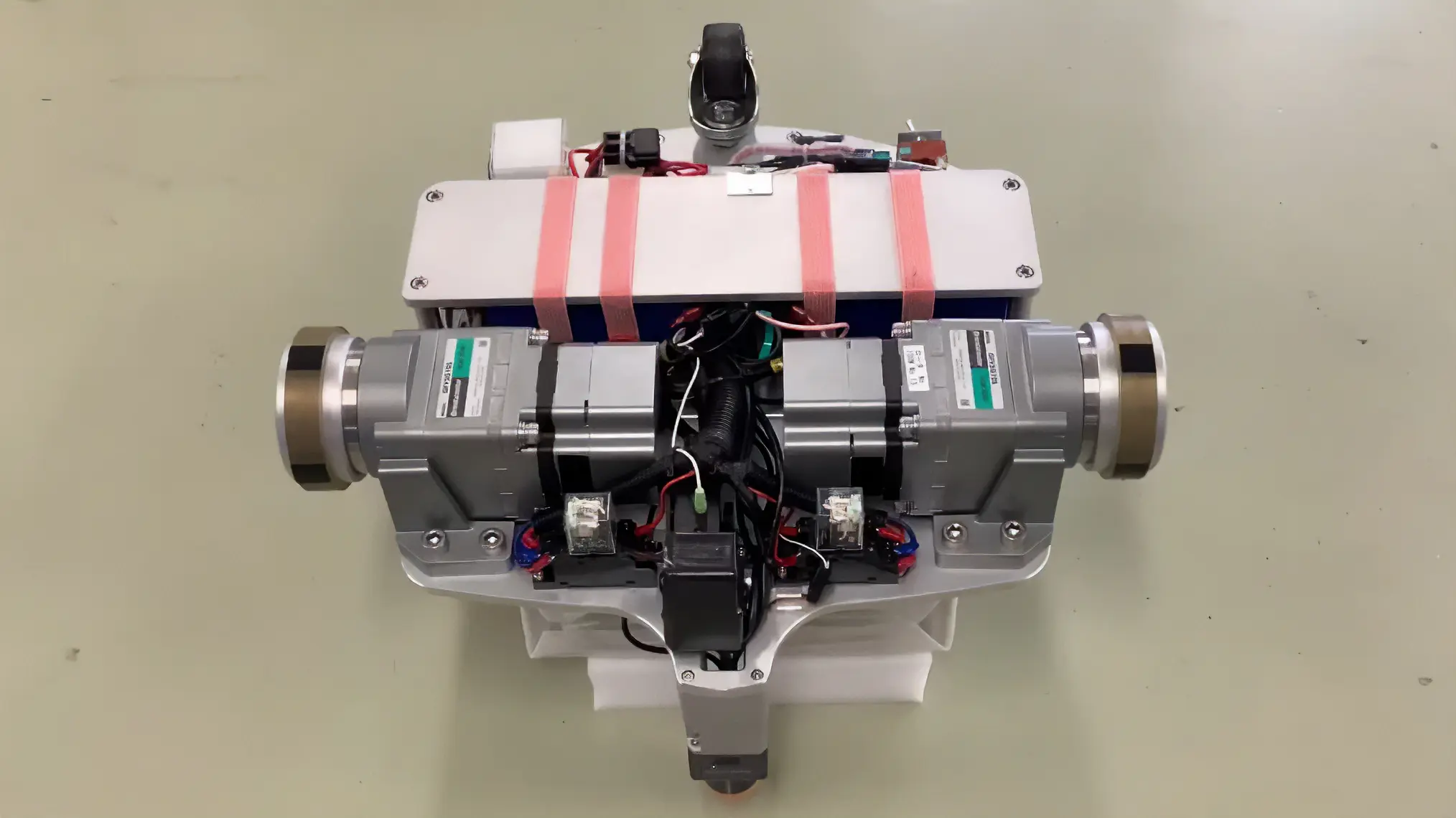
① 2輪駆動デモ機
デモ機の大きさと重量は、幅500mm×奥行き480mm×高さ290mmで、バッテリ含めて20kg程度。
バッテリはリチウムイオンの12V5Ahを直列2個使いです。
Raspberry Pi を使い、Modbus(RTU)でモーター制御。
コントローラ(ゲームパッド)から手動操作です。
システム構成
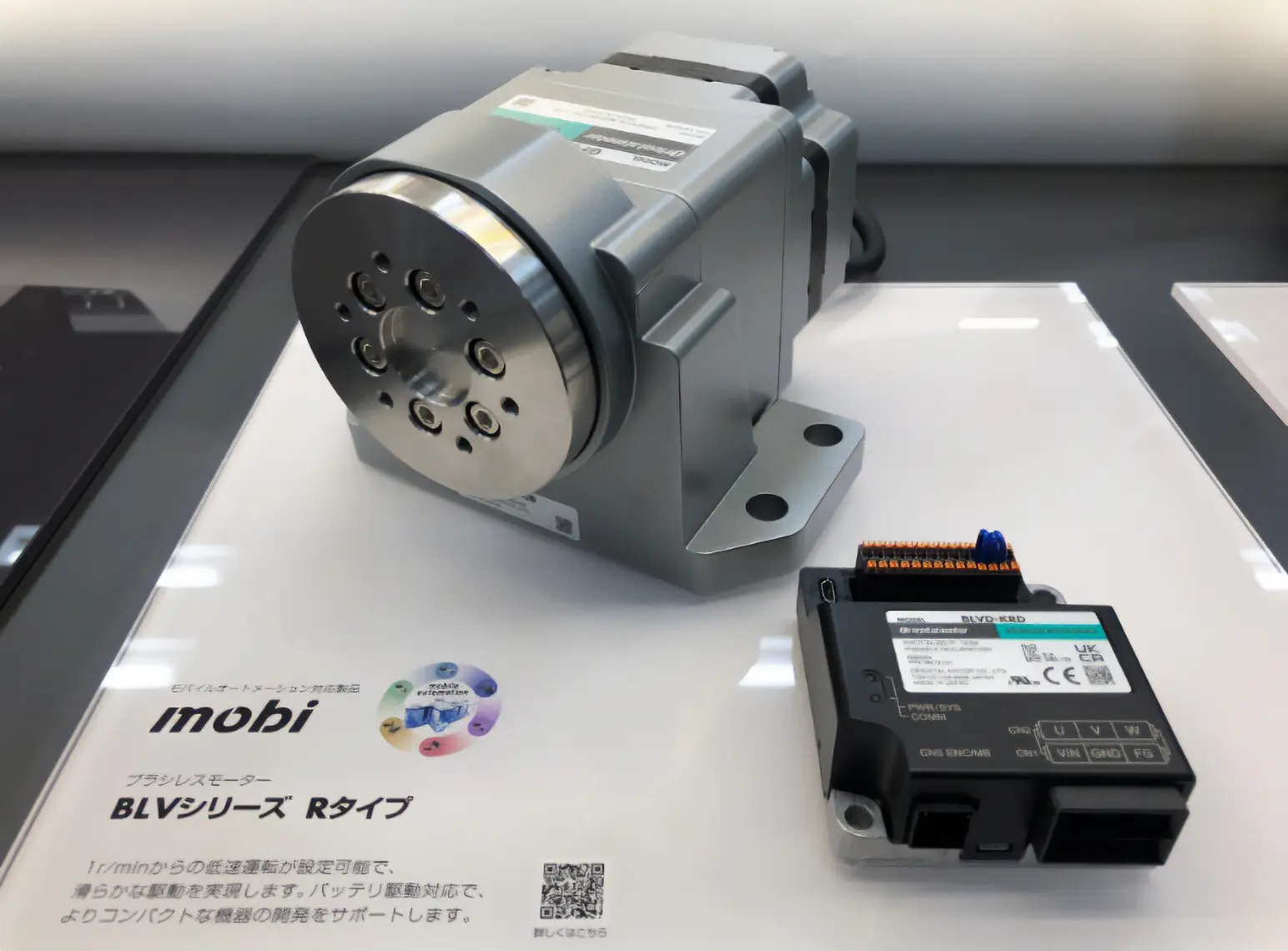
使用製品
BLMR5100KM-10-F×2、BLVD-KRD×2、AGD580B×2
駆動部にブラシレスモーターを使用、取付角寸法90mmで100W、減速比10の電磁ブレーキ付。
ギヤの先にフランジ出力ヘッドを取り付けることでラジアル荷重が大幅にアップします。
そのまま車輪をつけることができます。
ドライバは、Modbus(RTU)とCANopenに対応。
ドライバのサイズが幅65mm×奥行き75mm×高さ29mmで重さ120gと小型。
動作可能電圧もDC15V~55Vなので電圧変動もカバーできます。
早速、走らせてみました。
反応よく動いて、ピタっと止まります。
裏返した車輪(モーター)の動きもご覧ください。
前進→後退→左右の旋回、の動きです。
モーターは1~4000r/minが速度制御範囲で1r/min単位で設定できます。
減速比10・車輪直径100mmだと、AGVデモ機の速度範囲は0.5mm/s~2094mm/sです。
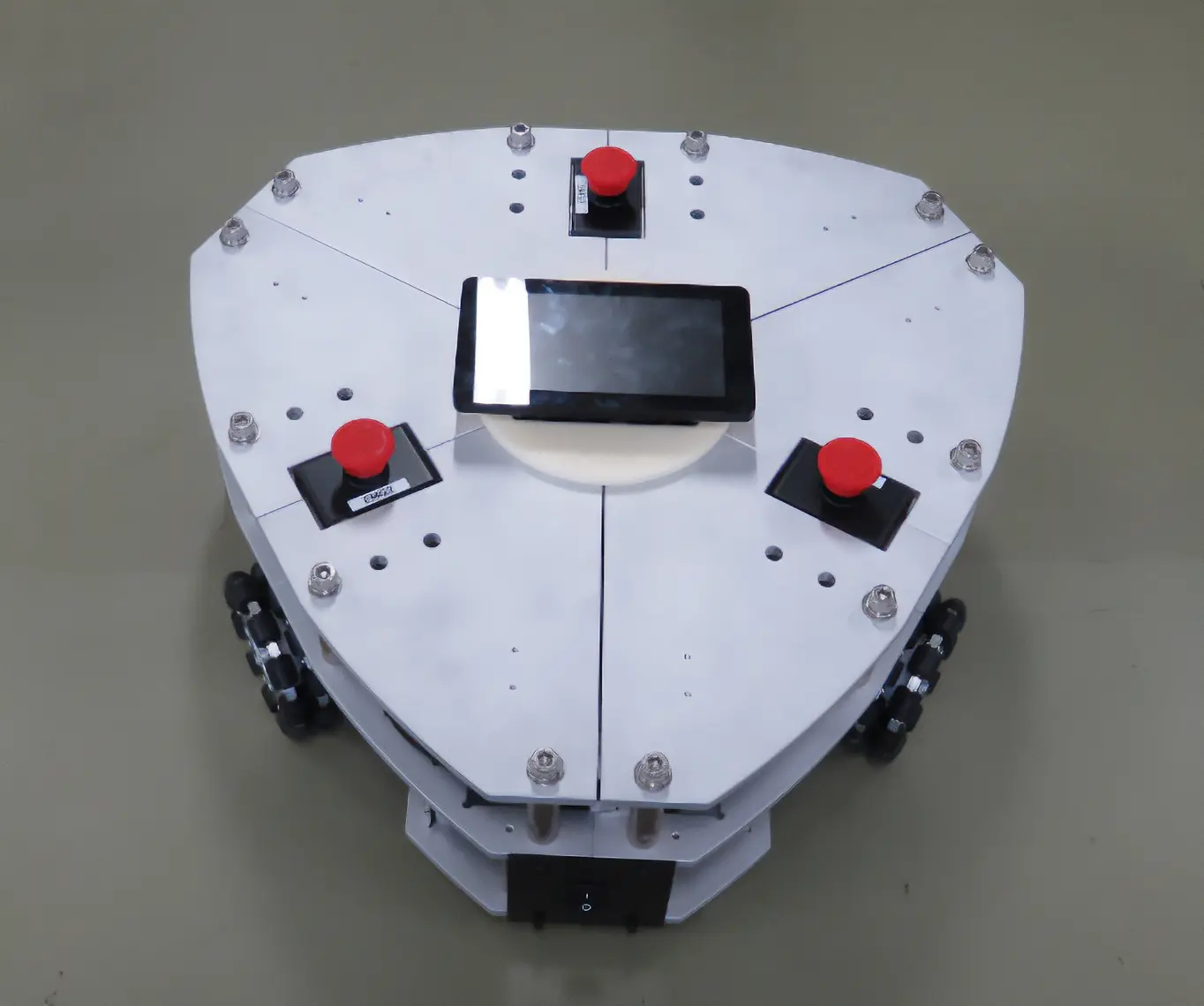
② 3輪駆動デモ機
オムニホイールの3輪駆動のデモ機です。
特徴的なのは、その場で旋回もできて全方向自由に動けることです。
デモ機の大きさと重量は、幅589mm×奥行き580mm×高さ253mmで、バッテリ含めて約37kg。
鉛バッテリ12V12Ahを直列2個使いです。
2輪駆動同様に、Raspberry Pi を使い、Modbus(RTU)でモーター制御。
コントローラ(ゲームパッド)から手動操作です。
自動運転のプログラムも入れています。
ただしこのデモ機は障害物検知センサはありません。
3個の非常停止ボタンは、各軸単独でのデモを想定していたためです。
上面のタッチパネルはRaspberry Pi用です。
システム構成
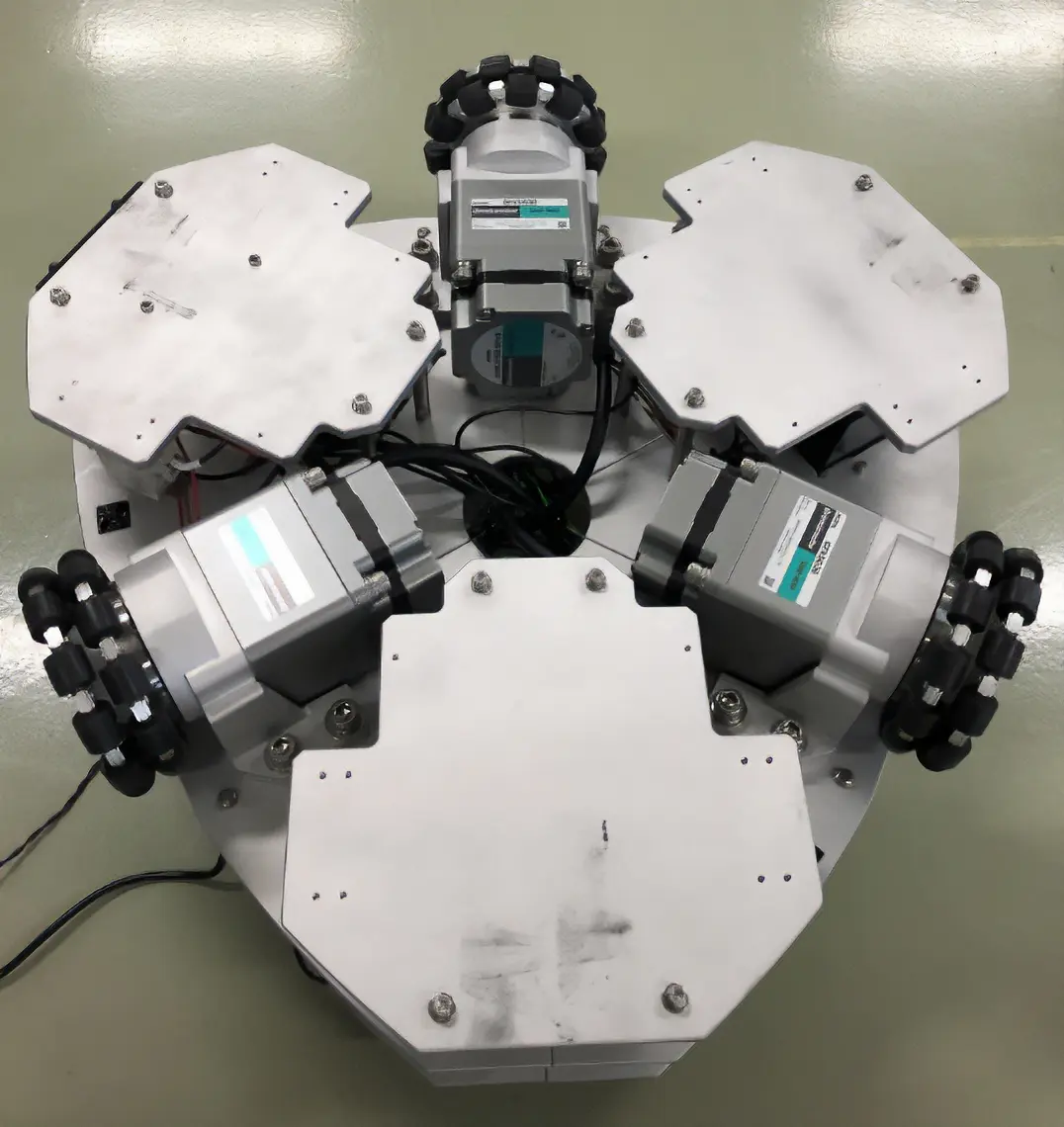
使用製品
BLMR5100K-30-B×3、BLVD-KRD×3、AGD580B×3
モーターは2輪駆動と同じですが、減速比30です。
自動運転で走らせてみました。
動作としては、後方前進→反転→前進→左右平行移動→ひし形動作→180度旋回往復→前進→超低速後進→反転→停止。
さまざまな運転パターンにも安定して動きます。
次に裏返して自動運転パターンで動かします。
モーターは1~4000r/minが速度制御範囲で1r/min単位で設定できます。
このように2輪駆動でも3輪駆動でも安定して動きます。
BLVシリーズRタイプは、位置決め運転もできます。
速度・位置・トルクのモニタ以外にも、内部電圧、モーター・ドライバ温度などモニタできる情報が多彩です。
2台とも、積載運搬を想定していないデモ機ですが、
減速比30で2輪駆動4輪AGVだと、100kg程度は運べる想定です。(筐体剛性や車輪配置で変わってきますが)
AGV/AMRといった搬送ロボットの足回りにいかがでしょうか。
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品