ローダーアンローダー(昇降装置) バケット搬送自動化事例
課題
バケットの積み込み、搬出を自動化したい
従来の装置
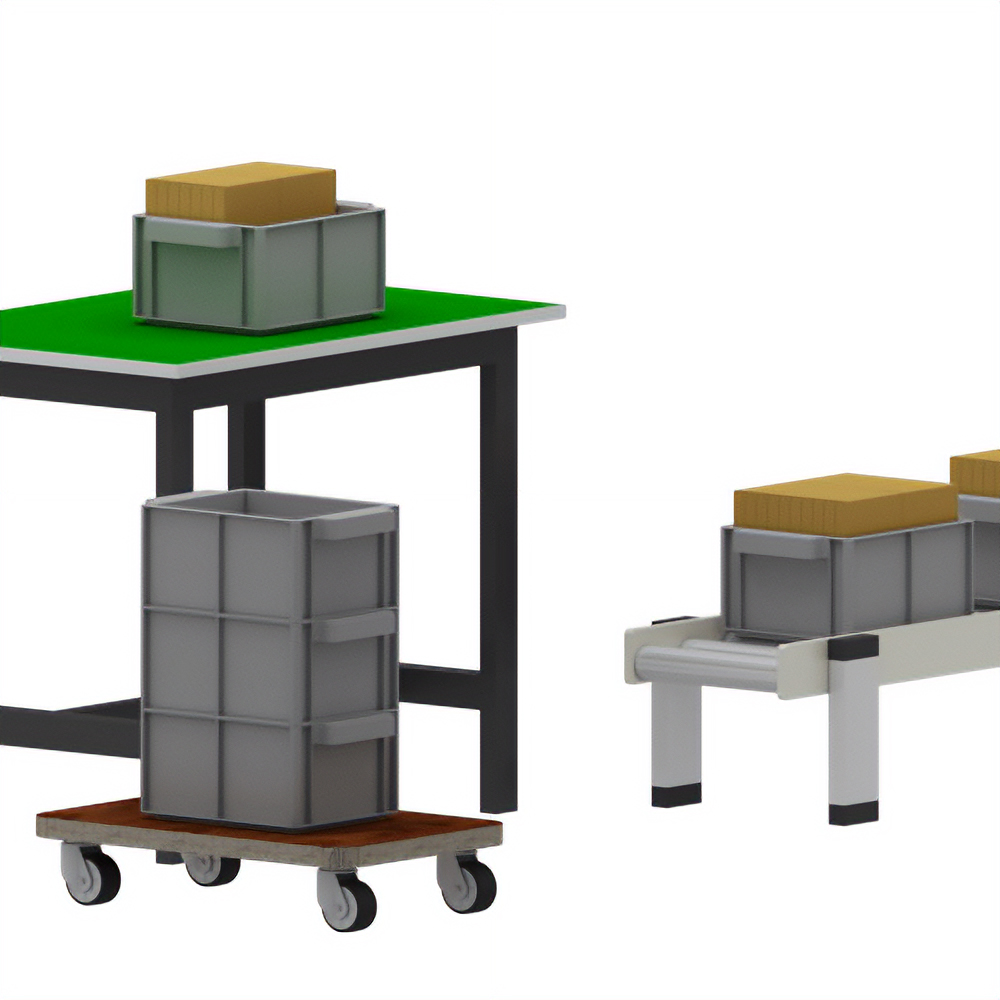
レトルト食品をバケットに手作業で積み込み、検査工程に搬出する工程。
- 用途
- バケットの移載
従来の問題点
- バケットの積み下ろしを人手に頼っているため、生産量にバラツキがでていた
解決策
Lシリーズ
ACスピードコントロールモーター DSCシリーズ搭載
ラック・ピニオン機構で移載を自動化

ラック・ピニオンシステムのLシリーズを採用することで、空きバケットの昇降、次工程への搬出を自動化できます。人手に頼らないため、生産量の見込みを立てやすくなります。
具体的なアプリケーション例

ラック・ピニオンシステムで省人化
ラック・ピニオン機構とモーターが一体化しているため、一度モーターを稼動させれば、その後の昇降をすべて自動化できます。停止位置はセンサの取り付けによって設定できます。
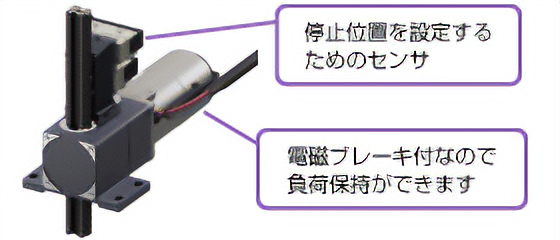
モーターには負荷保持用の電磁ブレーキが内蔵されてるため、停止時にバケットが落下する心配はありません。
場面によって速度を切り替え、タクトタイムを削減
DSCシリーズ搭載のLシリーズでは、4つの運転データ(速度など)を設定できます。
ワークを載せたバケットを上昇させるときは低速で、送り出した後は高速で下降する、といったように運転データを使い分けることで、工程全体のタクトタイムを削減できます。
あらかじめ、運転速度のパターンをデジタル設定しておくことで、生産量の見込みを立てやすくなります。
自動仕分けシステムや無人搬送車、パレタイジングシステム等のマテハン機器において、生産性向上や省人化などの課題を解決する製品導入事例やご提案をまとめました。