サブミクロン以内の高精度な位置決め機構
サブミクロン以内の高精度な位置決めを求める装置では、駆動源にフルクローズド制御を採用する必要があります。
サーボモーターでフルクローズド制御を行った場合、ハンチングを抑えるために、ゲイン調整を行う手間が発生する場合があります。
課題
検査画像がぼやける
従来の問題点
- 高精度な位置決めをするため、常にフルクローズド制御をしている
- ハンチングが起こる
- ゲイン調整に手間がかかる
解決策
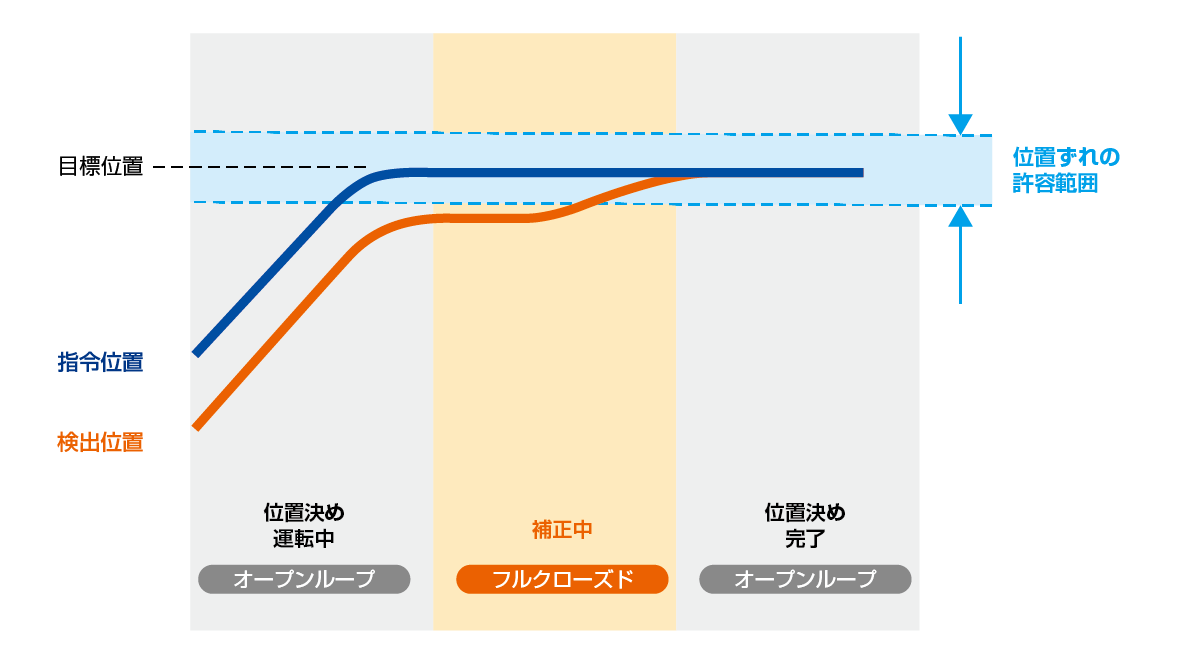
ステッピングモーターのフルクローズド制御
位置決め開始時はステッピングモーターの高応答を活かしたオープンループ制御を行います。
指令位置に達した後、フルクローズド制御で補正をします。
位置補正完了後は、オープンループ制御に切り替わるためハンチングが起こりません。
高精度位置決めを実現
オープンループ制御と比較し、フルクローズド制御はロストモーションが約60%減少します。
ロストモーション※1実測データ
-
オープンループ フルクローズド 0.51μm 0.15μm(目標精度±0.2μm以内) -
測定条件
- 送りねじリード1mm
- リニアスケール分解能0.1μm
- インポジション範囲:1cnt※2
- レーザー測長を用いて測定
- ※1 目標位置に対してモーターをCWおよびCCW方向から位置決めをおこない、その際の停止位置の回転方向に対する差になります。
- ※2 エンコーダパルス1カウントの誤差(-0.2~0.2μm)を目標に位置を補正。
ステッピングモーターでゲイン調整不要・ハンチングなし
- ゲイン調整が不要
サーボモーターでは必要な、機構に合わせたゲイン調整が不要です。
位置決め運転時にエンコーダのフィードバックを利用しないため、ベルトプーリーなど低剛性な機構やカムなど負荷変動の大きい機構にあわせた調整が不要です。 - ハンチングなしで停止位置を保持
位置決め完了時にハンチングがなく、モーター自身の保持力によって停止します。停止時に振動があると困る用途に適しています。
機構に合わせた各種外部センサに対応
各社各種のセンサに対応しており、機構に応じたセンサ種類からのフィードバックを使用できます。
