小型ロボット OVRでグリス塗布を自動化
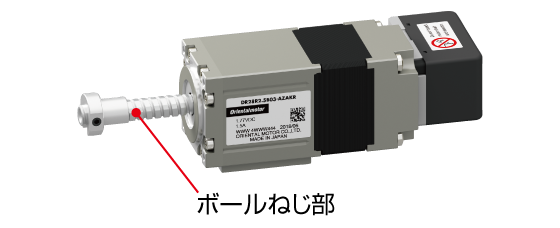
当社のコンパクト電動シリンダの組み立て工程は、ボールねじにグリスを塗布する工程から始まります。
しかし、手作業でおこなっているため、塗布量、塗布する位置など人の技量が必要な作業でした。
そのため、特定の人員しか作業できず、生産性向上におけるボトルネックとなっていました。
課題
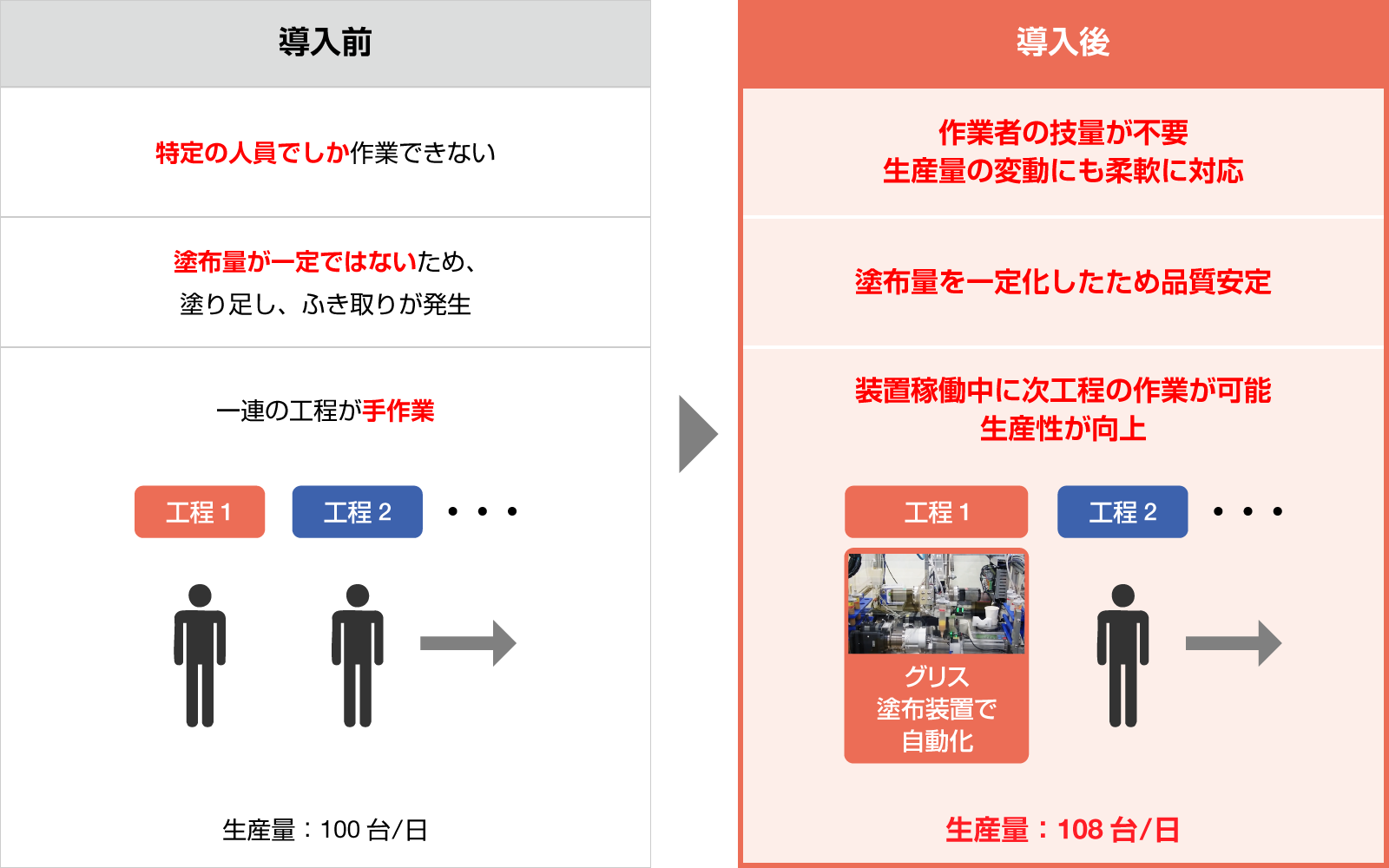
手作業のため生産性が上がらず、品質も安定しにくい
従来の問題点
- グリスの塗布量、塗布する位置など人の技量が必要
- 特定の人員しか作業できず生産性が上がらない
- 塗布量が一定ではないため、塗り足しやふき取りが発生

解決策
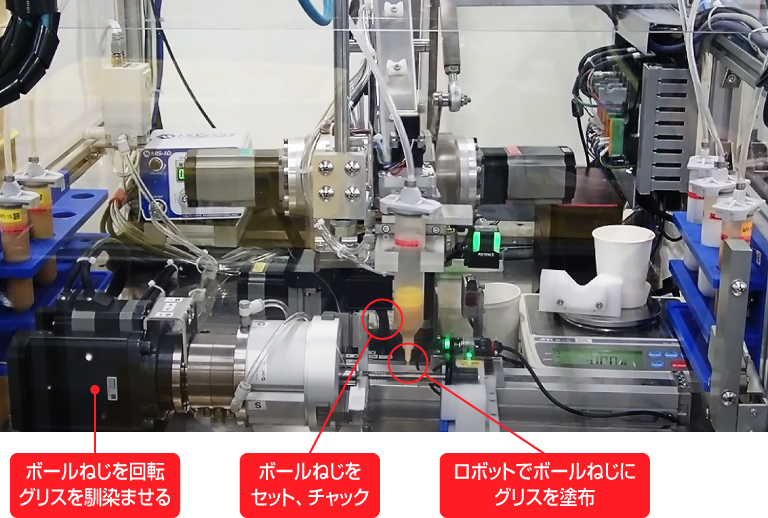
小型ロボットアームでグリス塗布を自動化
- 小型ロボットOVR 4軸垂直多関節ロボット、ロボットコントローラMRC01を使用したグリス塗布装置を製作、導入
- 手作業でおこなっていたグリス塗布を機械化することで塗布量の一定化を実現
- ボールねじにグリスを馴染ませる作業は、中空ロータリーアクチュエータDGⅡシリーズ、電動スライダ EZSシリーズクリーンルーム対応で機械化
- 装置
- グリス塗布装置
- 用途
- ボールねじへのグリス塗布
- 採用製品
- 小型ロボットOVR 4軸垂直多関節ロボット
ロボットコントローラ MRC01
中空ロータリーアクチュエータ DGⅡシリーズ
電動スライダ EZSシリーズ クリーンルーム対応
- 設備仕様
-
寸法(mm) W800×D1200×H1600 サイクルタイム 100 sec以下 主電源 AC100 V 対象ワーク 長さ:67 ~ 181 mm 直径:4 ~ 14 mm
採用ポイント
省スペース
製品によって使用するグリスが異なるため、設備には複数のディスペンサを設置するスペースが必要となる。
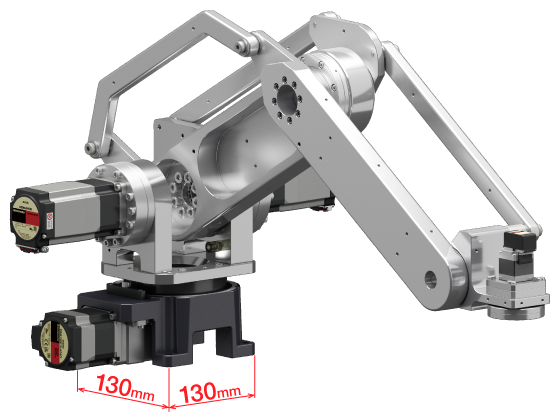
そのためスライダ/シリンダといった直交軸ではなく、垂直多関節ロボットで検討した。
小型ロボットOVR 4軸垂直多関節ロボットは、設置面積130 mm×130 mmと省スペースで広範囲作業が可能なこと、また安価であることが採用のポイントとなった。
これにより複数のディスペンサを狭い設備内に設置できるため、ディスペンサのオートチェンジ(段取り)ができ、多品種生産を可能にしている。
プログラム作成が簡単
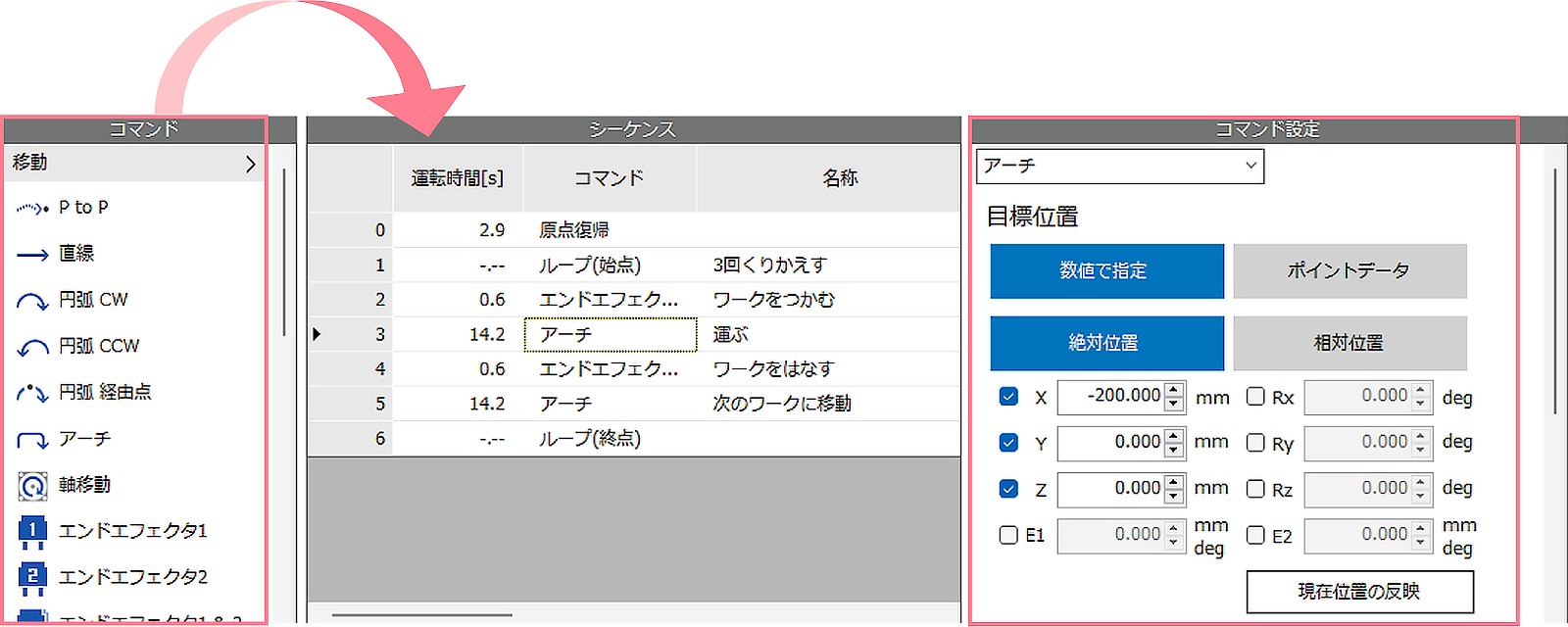
ラダーの知識は不要。項目選択で、動作のプログラミング
制御面では、通常、PLCで多軸のモーターを制御する場合、ラダープログラムを組むのが大変で、高いスキルが求められる。
そこで、プログラム作成が簡単にできるロボットコントローラMRC01を合わせて採用することにした。
立上げの負荷軽減と時間短縮
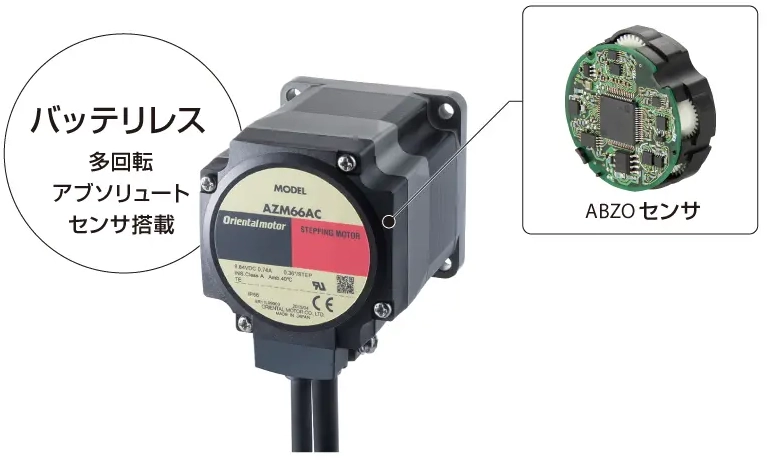
周辺の回転駆動、直線駆動には、バッテリレスアブソリュートセンサ内蔵のAZシリーズを搭載したアクチュエータをそれぞれ採用した。
モーター部分が同じAZシリーズのため配線・制御を統一でき、立上げの負荷軽減と時間短縮につながった。
導入効果
採用製品
小型ロボットOVR 4軸垂直多関節ロボット
OVR4068K5-V
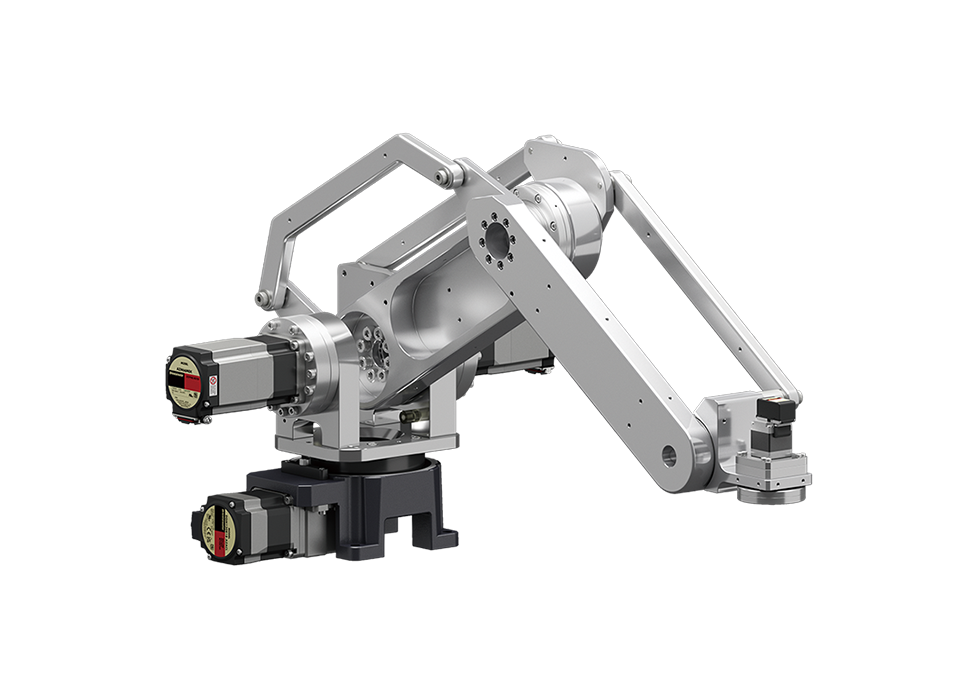
- 平行リンク機構
- 部品を常時水平な状態で安定搬送
- 最大可搬質量5 kg
- 最大リーチ長(水平)480/680/880 mm
- 駆動モーター: バッテリレスアブソリュートセンサ搭載AZシリーズ(DC入力)

中空ロータリーアクチュエータ
DGⅡシリーズ

- 中空テーブルとクローズドループステッピングモーターを一体化
- サーボモーター搭載も用意
- 取付角60~200 mm、中空径φ20~100 mm
- 高強度、高精度位置決め
