Q.NXシリーズ(張力制御モード)の簡易モードを使用する予定です。ユーザーズマニュアルに「送り速度を一定に保ってください」とありますが、なぜその必要があるのでしょうか?
簡易モードでは、送り速度が一定であることを前提として、出力トルクと回転速度を制御しているからです。
このモードにおいて送り速度が変化すると、同時に張力も変化し、安定した巻き取りをおこなえません。
ユーザーズマニュアルにのっとり、送り速度を一定に保って使用してください。
運転速度が変化する場合や加減速時も張力を一定に保ちたい場合は、「高機能モードI・II」をご利用ください。
簡易モードの張力制御方法について
巻き取り運転における張力は、以下のようにして決定します。
- 張力
-
トルク / ( 巻き取り径 / 2 )
巻き取り径は、巻き取り運転が進行するにつれて大きくなるため、張力を一定に保つためには、巻き取りモーターの出力トルクを制御する必要があることがわかります。
しかし、NXシリーズ単体では、現在の巻き取り径の情報を得ることができません。
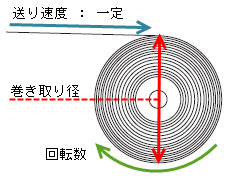
そこで、巻き取り径と、巻き取り軸の回転数の関係性に注目します。
- 巻き取り径
-
送り速度 / ( 回転数 × π )
モーターを巻き取りに使用する場合、回転数の情報は、モーターの回転速度に置き換えることができます。
(NXシリーズは回転速度のフィードバックを得ることができます。)
πは円周率を表す定数です。
これより、送り速度が一定のとき、巻き取り運転が進行するにつれて、巻き取り径は大きくなり、それに反比例して回転数が落ちることがわかります。
| 巻き取り径 | = | 送り速度 | / | ( | 回転数 | × | π | ) |
| 定数 | 定数 |
この関係性を元にして、張力と巻き取り径の関係を、あらためて整理します。
- 張力
-
トルク / ( 巻き取り径 / 2 )
トルク / { 送り速度 / ( 回転数 × π ) / 2 }
{ ( 2 × π ) / 送り速度 } × ( トルク × 回転数 )
送り速度が一定のとき、{ ( 2 × π ) / 送り速度 }は定数となります。
巻き取り運転が進行するにつれて、回転数は落ちるため、そのまま運転し続けると張力がだんだんと下がってしまうことがわかります。
| 張力 | = | { ( 2 ×π ) / 送り速度 } | × ( | トルク | × | 回転数 | ) |
| 定数 |
これより、張力を一定に保つためには、トルクと回転数の積がつねに同じ値になるようにしなければなりません。
つまり、回転数の減少に反比例して、トルクを増加させるような調整が必要です。
そこで、NXシリーズ(張力制御)の簡易制御モードでは、巻き取りモーターの出力トルクと回転速度を、以下のように制御しています。
上のグラフのように、回転速度に応じて出力トルクを変化させる(反比例させる)方法により、巻き取り径が変化しても、一定の張力で安定した巻き取り運転をおこないます。
製品カテゴリ: サーボモーター
機種・シリーズ: NXシリーズ
内容: 使用方法・設定方法 、技術知識・資料・用語
FAQ No.: 400
メールする
メール開封後、内容を確認し、当社よりご連絡いたします。なお、お問い合わせの内容によっては、お電話をさしあげる場合がありますのでご了承ください。