AZシリーズ 小型ドライバ(AZD-KRD)の開発
2019年11月27日時点の情報です。
近年、多関節ロボットなどの自動化装置では、小型・軽量化のためにドライバをモーターの近くに配置したいというニーズが増えており、ドライバに対しても小型・軽量化、省配線化が求められています。AZシリーズ小型ドライバは、通信制御に絞り、設定用スイッチを無くし、コネクタやケースなどの構造を見直すことで、従来品から体積が84 %、質量が74 % 低減しました。さらに、電源線と通信線をまとめたデイジーチェーン接続が可能であり、省配線による装置の軽量化に貢献できます。小型化を実現しながら、AZ シリーズの特長であるバッテリレスアブソリュートシステムや豊富な運転機能を備えています。ロボットシステムを効率的に開発できるROS 用のソフトウェアも用意しました。本稿では、AZ シリーズ小型ドライバの小型化、省配線化、機能について解説します。
1. はじめに
近年、労働力人口の減少を背景に、人の作業を代替する自動化装置の導入が進んでいます。その代表例が、多関節ロボットです。人の作業を代替する場合、装置は人と同等のサイズが求められ、装置全体の小型化が重要です。
一般的な装置では、ドライバを制御盤内に設置し、モーターまで配線を引き回す構成が用いられます。この構成では、配線が多くの空間を占有してしまい、引き回しが難しくなります。また、可動部に配線が多くある場合には、配線自体を動かすためにモーターに加わる負荷が増加し、出力の大きいモーターが必要になります。このように配線は装置が大型化する要因のひとつです。
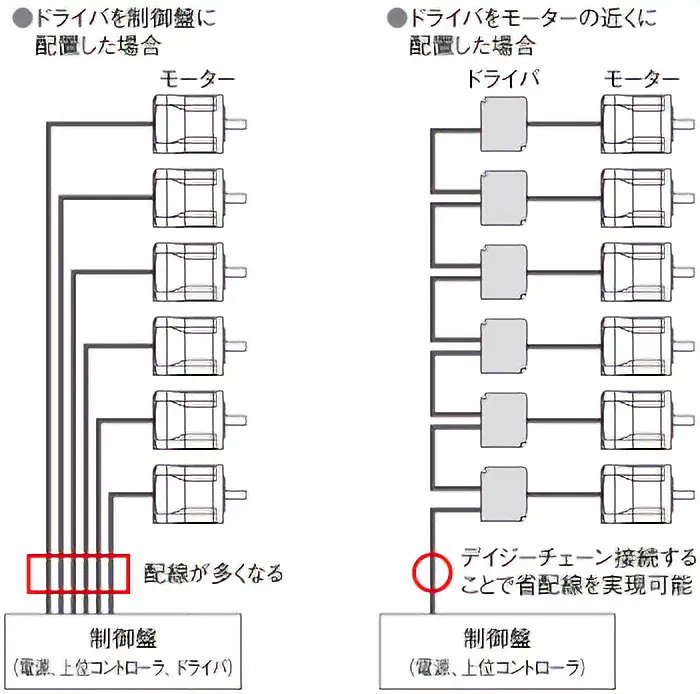
配線を少なくするためには、図1のようにドライバをモーターの近くに配置することが有効です。そのためには、ドライバには小型・軽量・省配線が求められます。
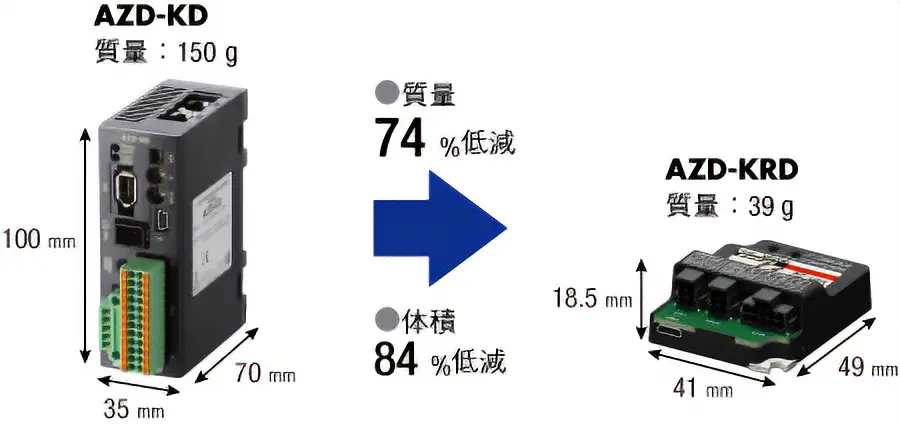
オリエンタルモーターでは、これらのニーズに応えるため、FAや半導体製造装置の業界などで多くの使用実績があるAZシリーズに、AZシリーズ小型ドライバ(以下、AZD-KRD)を開発しラインアップに追加しました(図2)。AZD-KRDは、同じDC電源入力のドライバAZD-KDと比較して、体積を84 %、質量を74 % 低減しています(図3)。
また、電源線と通信線をまとめてデイジーチェーン接続が可能なため、省配線が実現できます。

小型化を実現しながらAZシリーズの特長であるバッテリレスアブソリュートシステムや豊富な運転機能を搭載しています。また、ROS(Robot Operating System)対応のModbus RTU(注1)パッケージを用意しており、ロボット開発の際のModbus 通信に関するプログラムの簡素化が可能となります。
このテーマの全文を、PDFでダウンロードできます。


