電動グリッパ EHシリーズの特長と機能
2021年6月30日時点の情報です。
グリッパはロボットや自動機のエンドエフェクタとして用いられており、これらは主に空気圧を用いた「空気圧グリッパ」と、モーターを用いた「電動グリッパ」に大別されます。空気圧グリッパは、軽量・安価で簡単に駆動できますが、把持力・速度の微調整が困難です。一方、電動グリッパは、ワークに合わせて把持力・速度・位置を自由に設定でき、衝撃の抑制、最適な力での把持、およびタクトタイムの短縮が図れます。また、モーターの位置情報によりワークの有無の判定と寸法確認を行えます。電動グリッパEHシリーズは、把持機構にラック&ピニオン、駆動モーターにAZモーターを採用し、把持力の調整のしやすさに強みを持った製品です。本稿ではEHシリーズの特長、機能、ならびに活用方法を説明します。
1. はじめに
グリッパは物をつかむためのアクチュエータです。主にロボットや自動機のエンドエフェクタに用いられます(図1 参照)。グリッパは動力源で大別すると空気圧を用いた空気圧グリッパ(エアハンドやエアチャックとも呼ばれます)と、モーターを用いた電動グリッパがあります。
表1に空気圧グリッパと電動グリッパとの比較を示します。
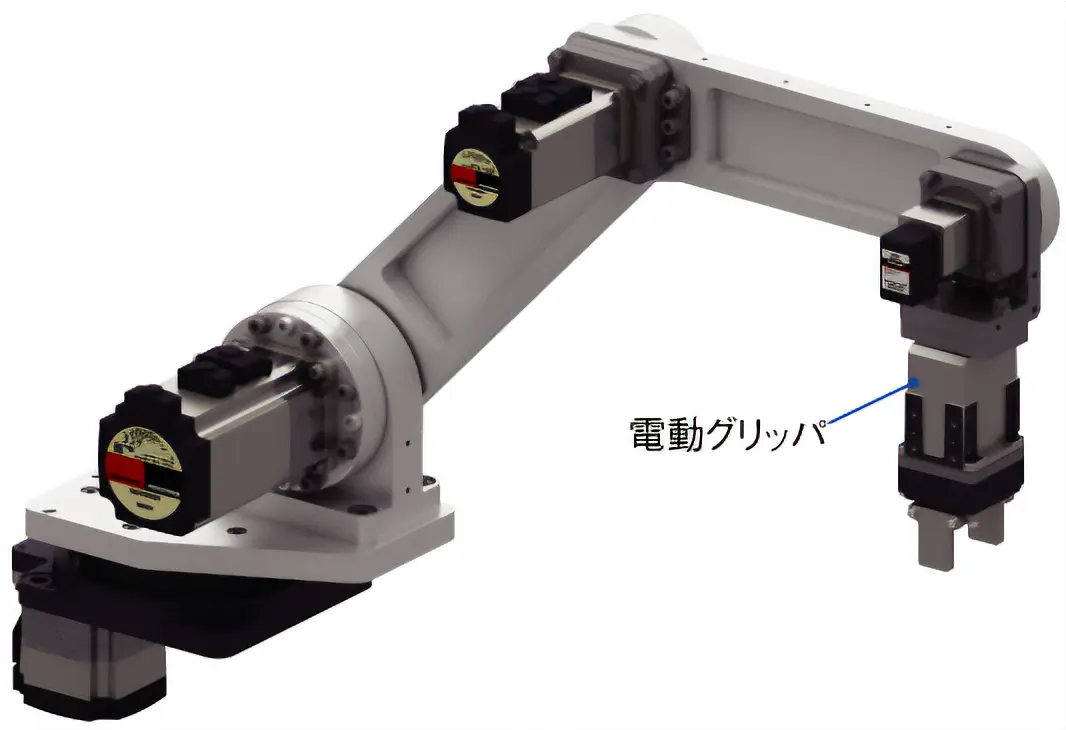
表1 グリッパの比較
| 項目 | 空気圧グリッパ | 電動グリッパ※ |
|---|---|---|
| 駆動源 | 空気圧 | モーター |
| 必要機器 | コンプレッサー レギュレータ スピードコントローラ ソレノイドバルブ |
直流電源 コントローラ 駆動回路(ドライバ) |
| 制御方法 | 把持力と速度を空気の 圧力と流量で制御 |
把持力をトルクで制御 速度を回転速度で制御 位置を回転角度で制御 |
| 価格 | 安価 | 高価 |
| 把持力に対する 製品質量比 |
小 | 大 |
- ※ 位置制御モーターを用いたグリッパ
空気圧グリッパは軽量・安価で簡単に駆動でき、ピック&プレイスなどでワークの把持に多く用いられます。しかし、剛性が低いワークを繊細に把持することは難しく、このような用途では電動グリッパが適しています。また、電動グリッパは制御モーターによる駆動であることから、ワークの把持完了や寸法確認などの機能を追加のセンサを使用せずに実装でき、作業時間の短縮や自動化に有効です。直流電源で動作する電動グリッパは、移動ロボット、無人搬送車(AGV: Automated Guided Vehicle)など、バッテリで駆動させることが多い移動式の装置にも適しています。
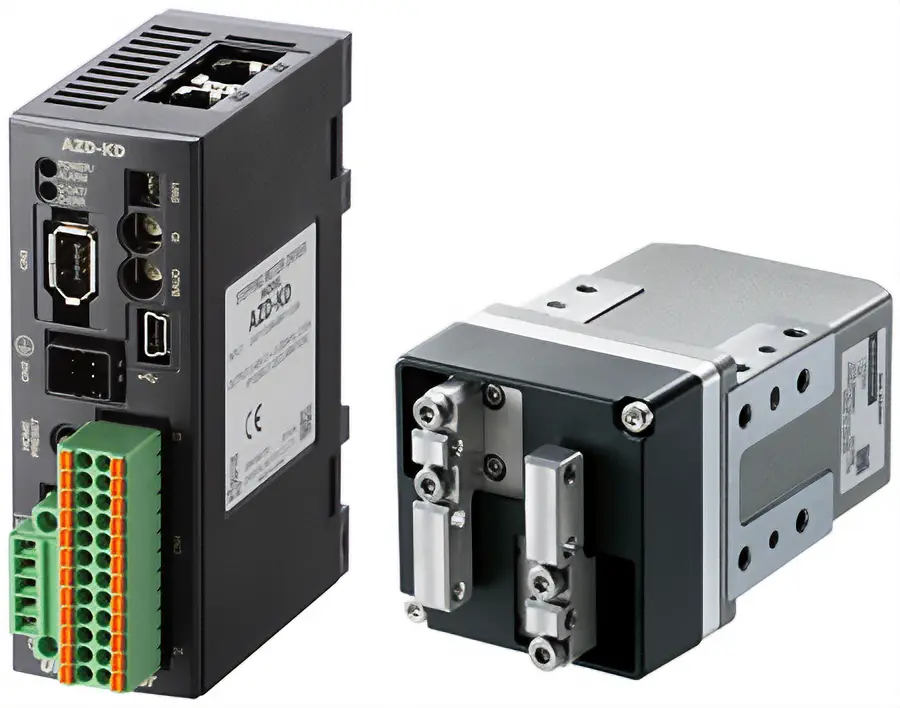
オリエンタルモーターは電動グリッパとして、ラック&ピニオン機構にステッピングモーターを組み合わせたEHシリーズ(EH4-AZAKH)を開発しました(図2 参照)。本稿ではEHシリーズの特長や機能、活用方法を実機での測定結果を示しながら説明します。
このテーマの全文を、PDFでダウンロードできます。
