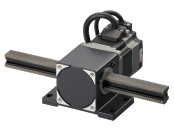
ラック・ピニオンシステム Lシリーズ αSTEP AZシリーズ搭載
LM2B500AZAC-6+AZD-C

| 製品種別 | 品名 | 定価(WEBショップ価格) | 出荷日 |
|---|---|---|---|
| リニアドモーター | LM2B500AZAC-6 | 78,100円(66,380円) | 10日(数量:1~5) |
| 回路 | AZD-C | 51,700円(43,940円) | 5日(数量:1~5) |
ドライバに接続する場合は、接続ケーブルをお使いください。
• 出荷日は、15時までにご注文された場合です。詳細はこちら
付属品
- リニアドモーター: なし
回路: 主電源・回生抵抗用コネクタ (CN4)、入出力信号用コネクタ (CN5)、DC24V電源入力・電磁ブレーキ接続・回生抵抗サーマル入力・動力遮断信号入出力用コネクタ (CN1)、コネクタ結線レバー
仕様
特性
外形図
データダウンロード
その他仕様
ドライバ仕様
| 位置決め機能 内蔵タイプ |
RS-485通信付き パルス列入力タイプ |
パルス列入力タイプ | ||||
|---|---|---|---|---|---|---|
| 入出力機能 | 最大入力パルス周波数 | - |
上位コントローラがラインドライバ出力 : 1MHz(Duty50%時) 上位コントローラがオープンコレクタ出力 : 250kHz(Duty50%時) 負論理パルス入力 |
|||
| 位置決めデータ数 | 256点 | 256点※1 | ||||
| ダイレクト入力 | 10点 | 6点 | ||||
| ダイレクト出力 | 6点 | |||||
| RS-485通信リモート入力 | 16点 | - | ||||
| RS-485通信リモート出力 | 16点 | - | ||||
| 設定ツール | サポートソフト MEXE02 | ○ | ○ | ○ | ||
| 座標管理方法 | バッテリレス アブソリュートシステム |
○ | ○ | ○ | ||
| 運転 | 位置決め 運転 |
種類 | 位置決め運転 | ○ | ○ | ○※1 |
| 位置決め押し当て運転※2 | ○ | ○ | ○※1 | |||
| 連結方式 | 単独運転 | ○ | ○ | ○※1 | ||
| 順送運転 | ○ | ○ | ○※1 | |||
| 多段変速(形状連結) | ○ | ○ | ○※1 | |||
| シーケンス 制御 |
ループ運転(繰り返し) | ○ | ○ | ○※1 | ||
| イベントジャンプ運転 | ○ | ○ | ○※1 | |||
| 連続運転 | 位置制御 | ○ | ○ | ○※1 | ||
| 速度制御 | ○ | ○ | ○※1 | |||
| トルク制御 | ○ | ○ | ○※1 | |||
| 押し当て※2 | ○ | ○ | ○※1 | |||
| 原点復帰運転 | 原点復帰運転 | ○ | ○ | ○ | ||
| 高速原点復帰運転 | ○ | ○ | ○ | |||
| JOG運転 | ○ | ○ | ○ | |||
| モニタ/インフォメーション | 波形モニタ | ○ | ○ | ○ | ||
| 過負荷検出 | ○ | ○ | ○ | |||
| 過熱検出 (モーター・ドライバ) |
○ | ○ | ○ | |||
| 位置・速度情報 | ○ | ○ | ○ | |||
| 温度検出 (モーター・ドライバ) |
○ | ○ | ○ | |||
| モーター負荷率 | ○ | ○ | ○ | |||
| 走行距離・積算走行距離 | ○ | ○ | ○ | |||
| アラーム | ○ | ○ | ○ | |||
- ※1
- サポートソフト MEXE02で設定することで使用可能です。
- ※2
- 押し当て運転はギヤードモーターおよび電動アクチュエータDGIIシリーズではご利用になれません。
一般仕様
| リニアドモーター | ドライバ | |||
|---|---|---|---|---|
| 位置決め機能内蔵タイプ RS-485通信付きパルス列入力タイプ EtherNet/IP対応 EtherCATドライイブプロファイル対応 PROFINET対応 |
パルス列入力タイプ MECHATROLINK-III対応 SSCNETIII/H対応 |
|||
| 耐熱クラス | 130(B) [UL/CSA規格取得時は105(A)で認証されています] |
− | ||
| 絶縁抵抗 |
以下の通りに DC500 Vメガーにて測定した値が100 MΩ以上あります。
|
以下の通りにDC500 Vメガーにて測定した値が100 MΩ以上あります。
|
||
| 絶縁耐圧 |
以下の通りに1分間印加しても異常を認めません。
|
以下の通りに1分間印加しても異常を認めません。
|
||
| 使用環境 | 周囲温度 | 0 ~ +40 ℃(凍結のないこと)※2 | 0 ~ +55 ℃(凍結のないこと)※3 | |
| 周囲湿度 | 85 %以下(結露しないこと) | |||
| 雰囲気 | 腐食性ガス・塵埃のないこと。水・油などが直接かからないこと。 | |||
| 保護等級 | IP30(ラック可動部、コネクタ部を除く) | IP10 | IP20 | |
| 非通電状態での多回転検出範囲 (モーター出力軸) |
±900回転(1800回転) | |||
- ※1
- 電磁ブレーキ付のみ
- ※2
- 当社測定条件による
- ※3
- 200×200 mm、厚さ2 mmのアルミ板相当以上の放熱板取り付け時
ご注意
絶縁抵抗測定および絶縁耐圧試験を行なうときは、モーターとドライバを切り離してください。
また、モーターのABZOセンサ部は、これらの試験を行わないでください。
繰り返し位置決め精度 (参考値)
可搬質量時の実測値です。負荷、駆動条件、取付方向により変化します。
| 品名 | ラック移動方向 | 繰り返し位置決め精度[mm] |
|---|---|---|
| LM2 | 平行 | ±0.25 |
| LM4 | ||
| LM2 | 垂直 | ±0.07 |
| LM4 |
移動方向
出荷時、ラックの移動方向は次のように設定されています。
ラック許容回転トルク (モーメント)
| 品名 | ラック許容回転トルク (モーメント) |
|---|---|
| LM2 | 0.3N・m 以下 |
| LM4 | 0.5N・m 以下 |
- 回転トルクは、必ず許容値以下にしてください。
回転トルクがかかりすぎると、ラックブッシュの摩耗が早くなります。

許容ラジアル荷重
| ストローク mm |
LM2□90 | LM2□500 | LM4□40 | LM4□500 |
|---|---|---|---|---|
| 100 | 25 | 25※1 | 120 | 60※1 |
| 200 | 20 | 20※1 | 90 | 40※1 |
| 300 | 10 | 10※1 | 70 | 30※1 |
| 400 | 10 | 10※1 | 60 | 25※1 |
| 500 | 7 | 7※1 | 50 | 20※1 |
| 600 | ※2 | ※2 | 40 | 15※1 |
| 700 | ※2 | ※2 | 40 | 10※1 |
| 800 | ※2 | ※2 | 25 | 7※1 |
| 900 | - | - | 20 | ※2 |
| 1000 | - | - | 15 | ※2 |
- 品名中の□には、ラック移動方向を表すF(取付脚面に対して垂直)またはB(取付脚面に対して平行)が入ります。
- ※1
- 運転速度90mm/sまでの値です。90mm/sを超える速度で運転するときは、ガイドなどを設けてラジアル荷重がラックへかからないようにしてください。
- ※2
- ラックが破損するため、ガイドなどを設けてラジアル荷重がかからないようにしてください。

システム構成

ケーブル・周辺機器
LM2B500AZAC-6+AZD-C
と選択した周辺機器を
品名欄にチェックを入れて「ショップで見積・購入」への追加ができます。
この製品と周辺機器を
close
close
close
close
close
close
close
close
close
close