ロボットコントローラMRC01を使って〇□×をトレースしてみた!
やってみた!
~ 案外使えるかも!関節の負荷もMRCソフトのグラフィックモニタで一目瞭然。 ~
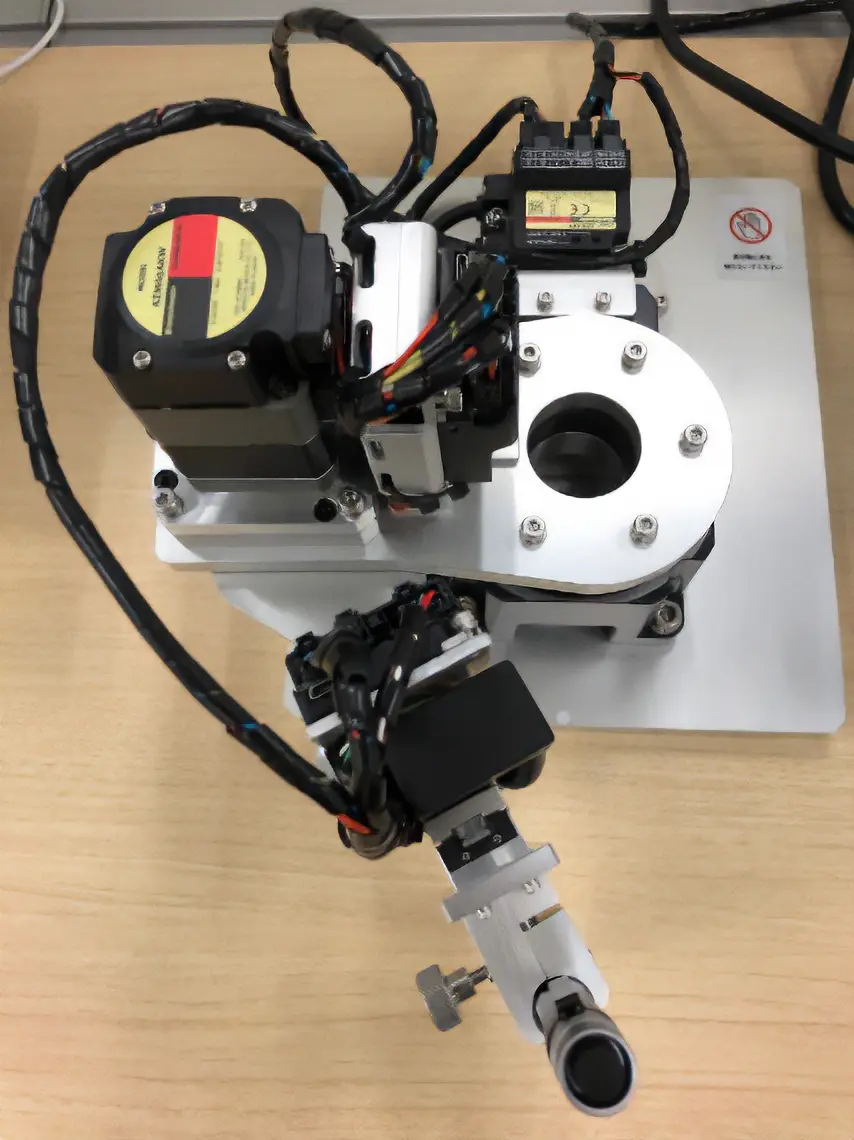
ロボットコントローラ MRC01と、プログラミングソフト MRC Studioの卓上デモ機をつくりました。
水平(回転)2軸、垂直(先端)1軸の3軸スカラ構成です。
アーム長さは、回転軸(DG軸)の中心から、ペンライトの中心まで260mm。高さは190mm程度。
各軸間の制御はRS-485通信のModbus(RTU)です。MRC01はEtherNet/IPと接続可能です。
システム構成
使用製品
MRC01、DGB85R36-AZAKR、DR20T1BC02-AZAKL、AZM46AKW、AZD-KRD×3
(以降HDS社) CSF-11-50-2UP-SP-C
モータードライバは、AZD-KRDという小型ドライバを使用。
小型なのでモーターの隣に置けます。
なお、2021年秋に機能アップした小型ドライバ、AZD-KR2Dがリリースされています。
DC電源は2個使用。軸を増やす予定で容量は大きめです。
このデモ機は先端が細身なので持てる重量はペンぐらい(100g程度)です。
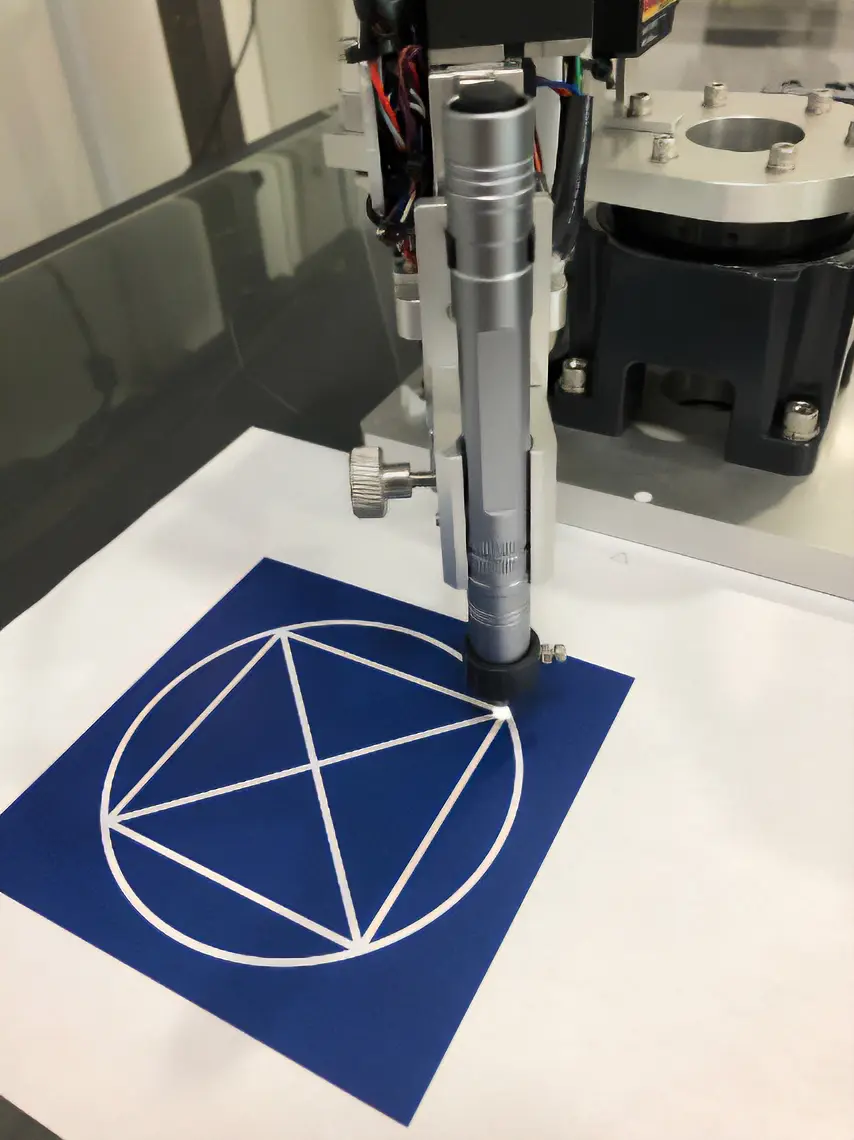
トレースするのは、〇□×の図形です。
早速、MRC01とノートPCをUSB接続して、MRC Studioのテスト実行をやってみました。
グラフィックモニタが見やすいように、速度は20mm/sに落として動かしています。
先端の上下軸はモーターが小さめなので、かかる負荷もいくらか大きめです。
上下駆動時に薄めですが赤色になり、負荷率は数値でも確認できます。
上から順々に、プログラムが実行されますので、比較的動作がわかりやすいのではないかと思います。
丁寧な動きをロボットで行ないたい、という方には使えそうではないでしょうか?
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品