ロボットコントローラを使ってX-Yで8の字最速運転やってみた!
やってみた!
~スカラ構成のX-Yで8の字円弧補間の最速運転を試してみました。~
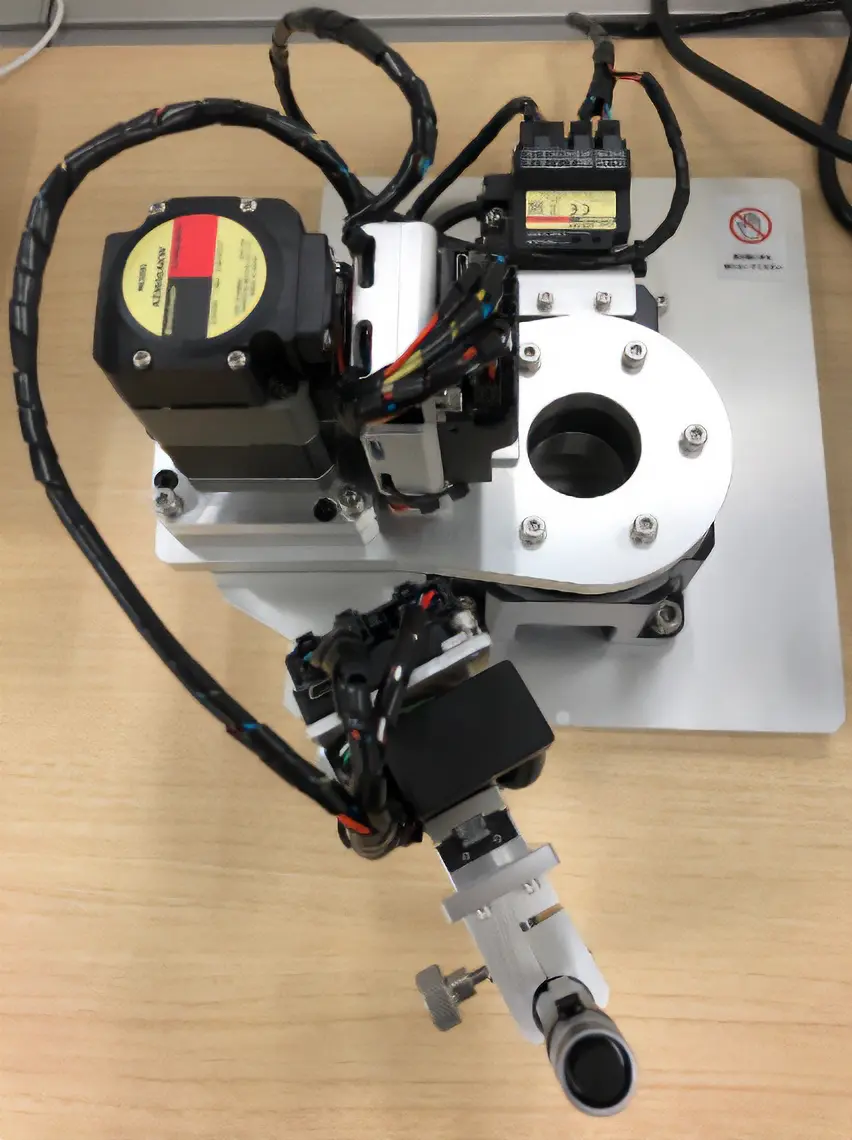
ロボットコントローラ MRC01と、プログラミングソフト MRC Studioの卓上デモ機で、実験してみました。
水平(回転)2軸、垂直(先端)1軸の3軸スカラ構成です。
アーム長さは、回転軸(DG軸)の中心から、ペン先の中心まで260mm。
各軸間の制御はRS-485通信のModbus(RTU)です。MRC01はEtherNet/IPと接続可能です。
システム構成
使用製品
MRC01、DGB85R36-AZAKR、DR20T1BC02-AZAKL、AZM46AKW、AZD-KRD×3
(以降HDS社) CSF-11-50-2UP-SP-C
ドライバは、AZD-KRDという小型ドライバを使用。
小型なのでモーターの隣に置けます。
なお、最新の小型ドライバは、機能アップしたAZD-KR2Dがリリースされています。
DC電源は2個使用。軸を増やす予定で容量は大きめです。
このデモ機は先端が細身なので持てる重量はペンぐらい(100g程度)です。
先端に吸着ピンセットを取り付けていますが、今回は特に活躍しません。
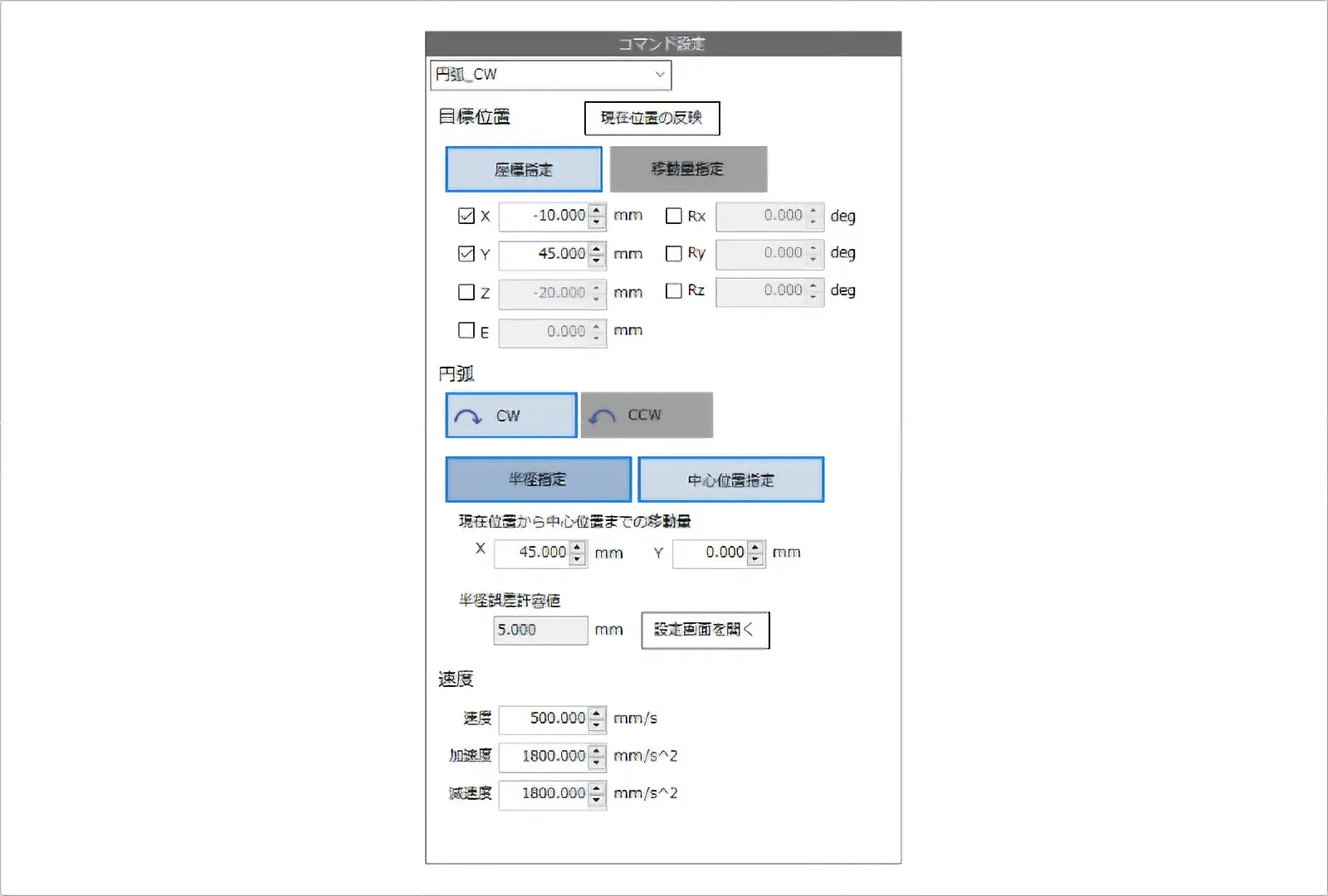
動作は円弧補間で、直径80mmの円を時計方向に1回転し、次に反時計回りに1回転します。
これを3回繰り返します。
MRC Studioのテスト実行(連続)のため、コマンド間で若干のタイムラグがあります。
速度は、TCP指令速度 X-Y軸:500mm/s、Z軸(DR軸):18mm/sです。
なおこのデモ機では、X-Y軸の最高速度は500mm/s、Z軸の最高速度は20mm/sです。
加減速設定は、X軸、Y軸:1800mm/s2、Z軸:200mm/s2です。
普段は安全面からカバーで覆っていますが、今回は撮影のため、安全を確認した上でカバーを取り外しています。
今回は最速運転を行ないましたが、低速でなめらかに動かすことも可能です。
円筒形状の計測や外観検査といった装置の一部として使えそうでしょうか。
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品