3つ爪の電動グリッパを使って、いろいろなワークをつかんでみた!
やってみた!
~ EHシリーズ3つ爪タイプが得意な形状のワークをいくつか掴んでみました ~
EHシリーズ2つ爪電動グリッパの把持力調整実験を以前やりましたが、
今回は、3つ爪タイプの電動グリッパでさまざまなワークを掴んでみました。
3つ爪は、取付カバー付/なしの2種類。今回はカバー付を使い、特性・性能は変わりません。
カバー付の大きさは、ツメ側からみて縦横が46mm×48.5mmで奥行きが98mmです。
製品の重さは380g。最大把持力は27N。
フィンガの最高回転速度は1200r/minで、押し当て速度の上限は12r/minです。
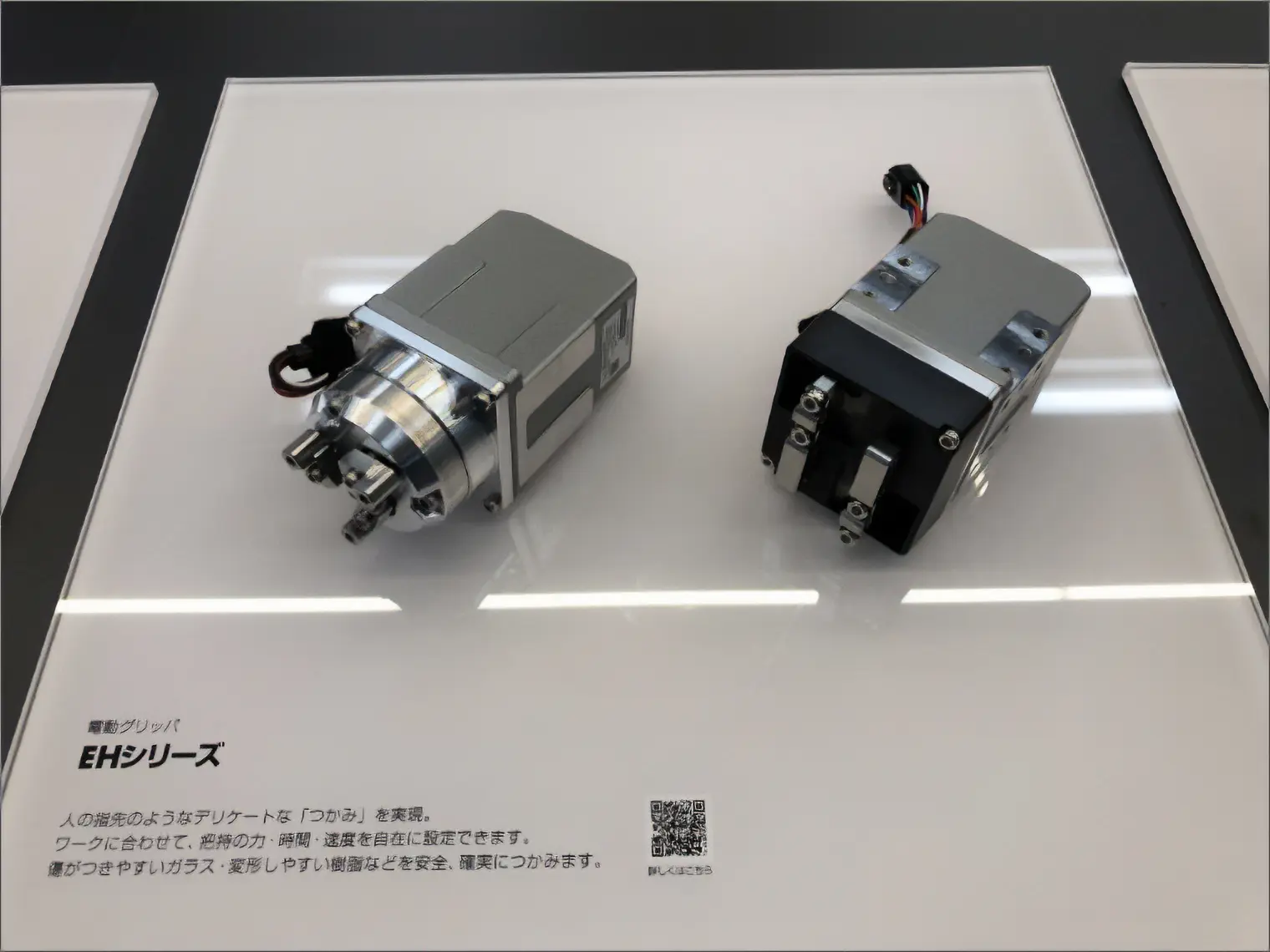
当社ショールームの展示製品の写真を載せました。
写真の左側が今回実験する3つ爪タイプ、右側が2つ爪タイプです。
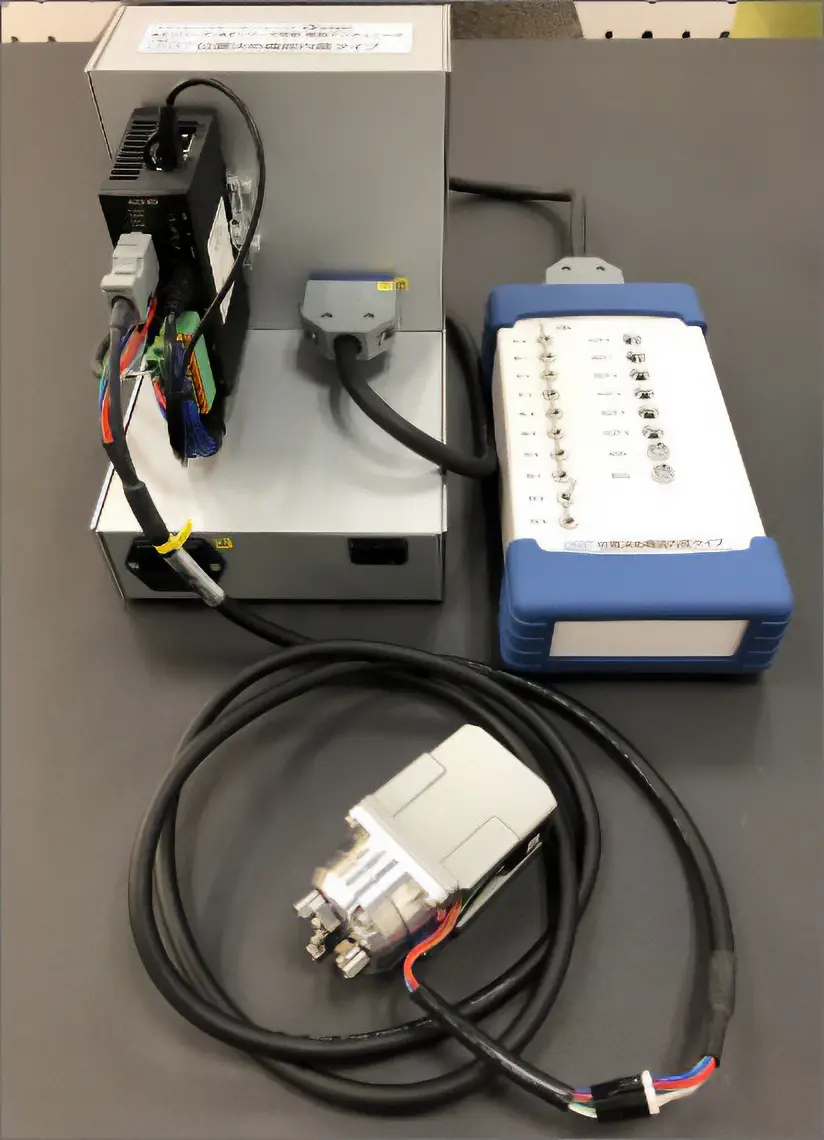
実験するセットを以下に。
モーター(3つ爪電動グリッパ)、ドライバ(位置決め機能内蔵タイプ)、デモ機流用のI/OボックスとDC24V電源(金属ケース内)。
使用製品
EH4T-AZAKH, AZD-KD
システム構成
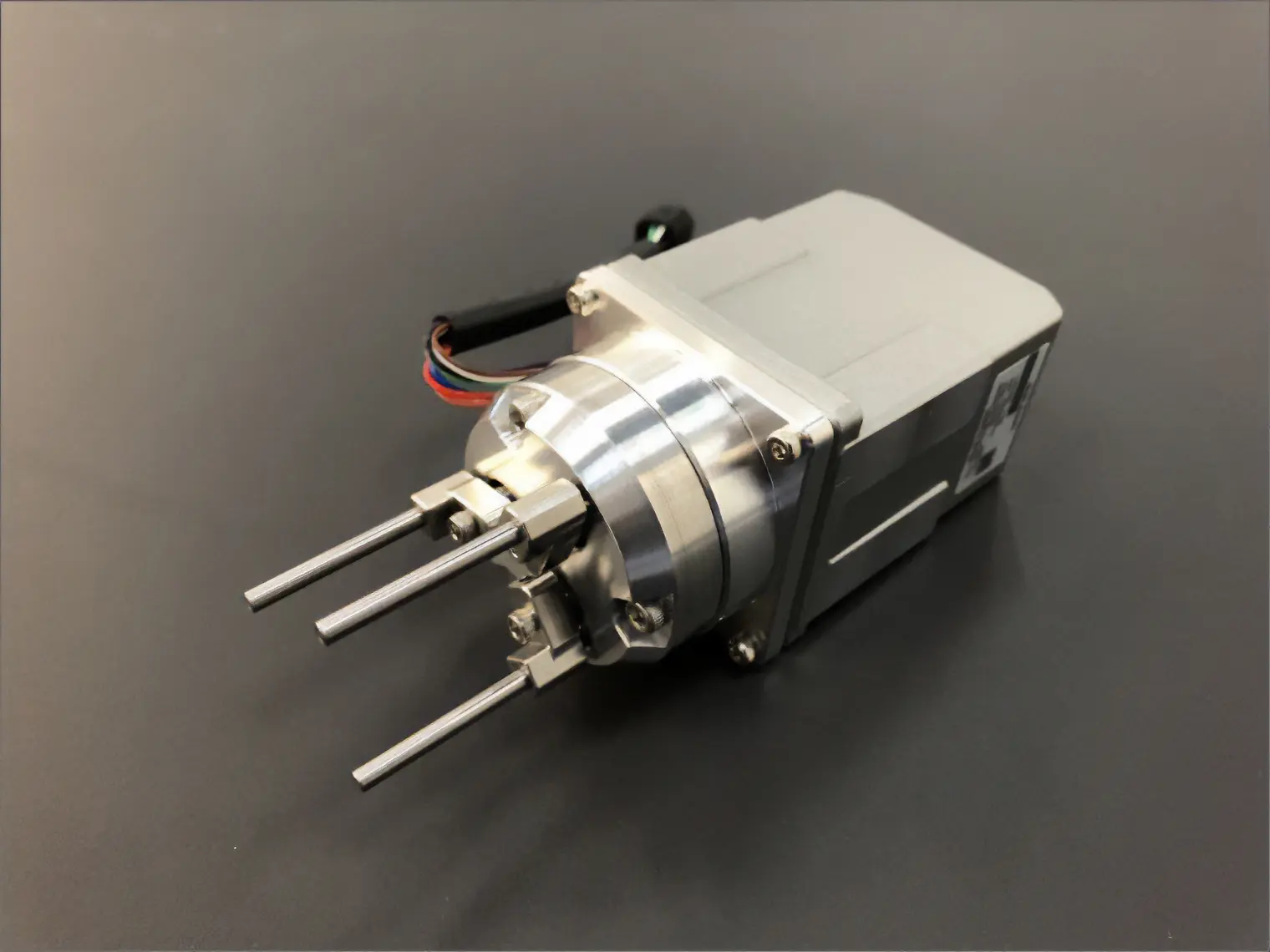
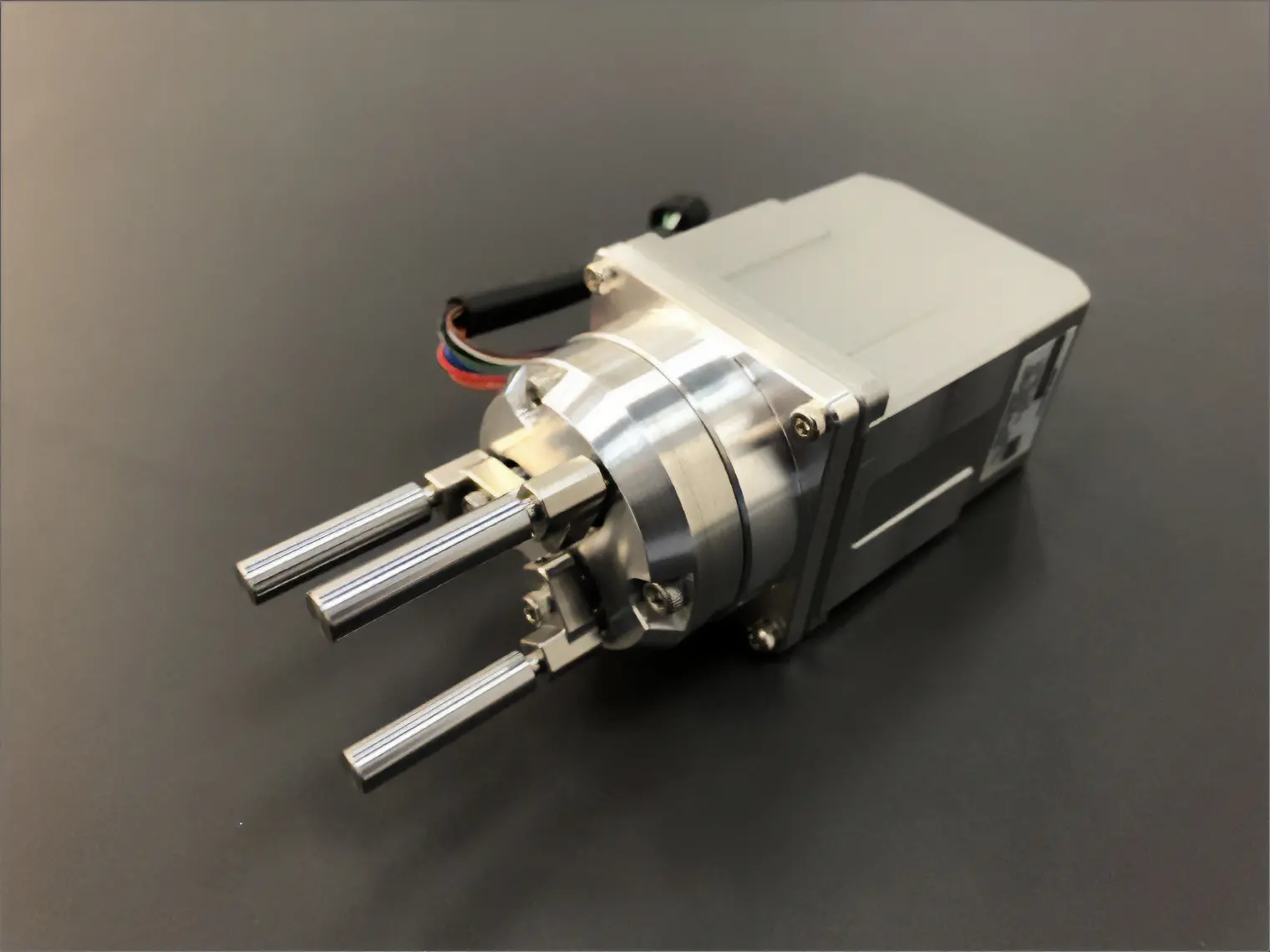
製品にツメは添付されないので、直径3mmと6mmで長さ25mm程度のものを用意しました。
ツメ取付穴は、M3でねじ深さ6mmなら取り付けできます。
開閉の様子は以下の動画に。
直径3mmのツメに、黒ゴムキャップをつけてみました。
主な設定は、分解能が初期設定、運転速度は1kHz、移動量は0~2200[step]の往復で
絶対位置決め押し当て運転をおこなっています。
運転電流は実験的に10%程度まで下げています。(目安は20%ぐらいまで)
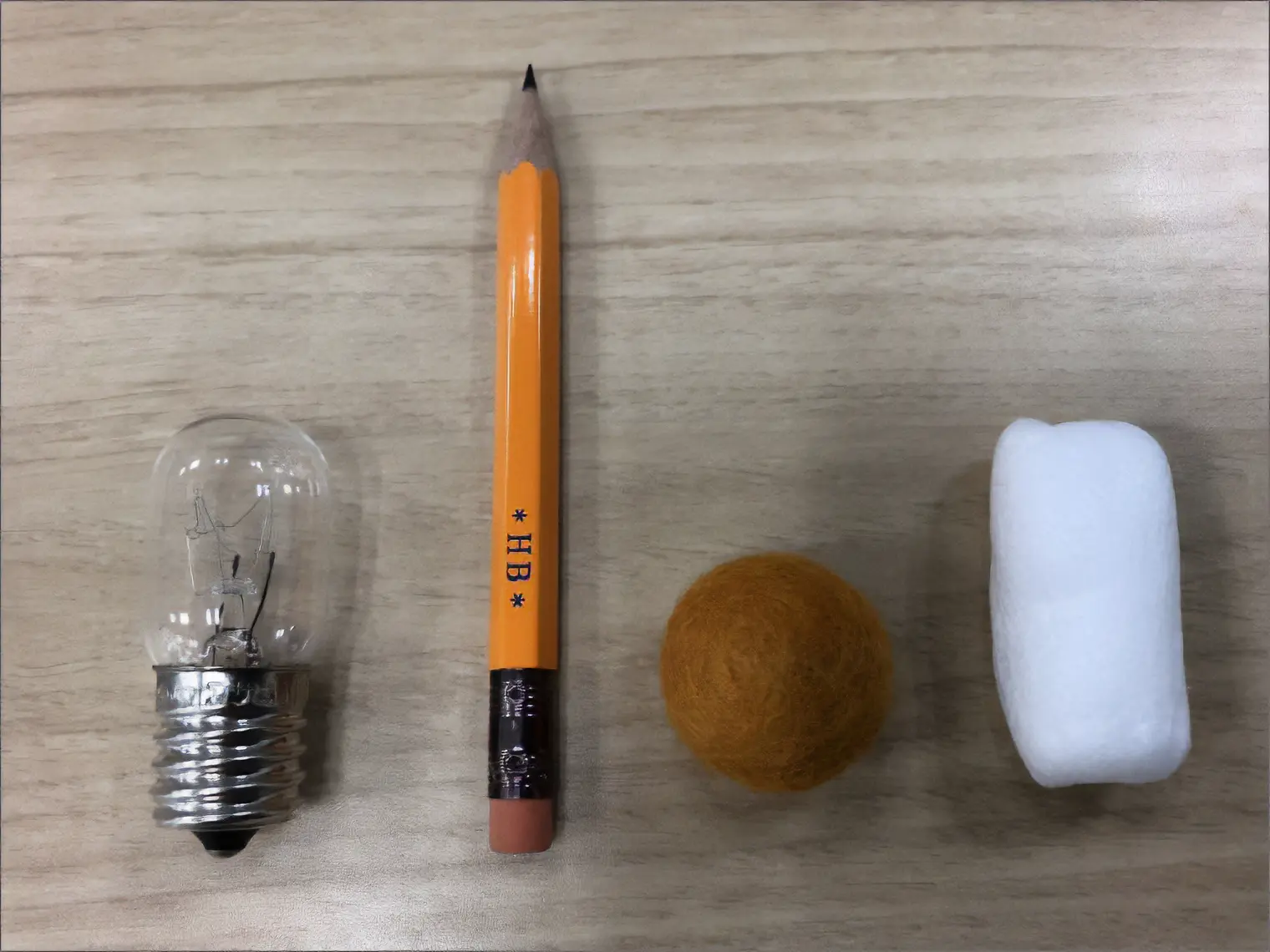
把持力がイメージしやすいワークとして、電球、鉛筆、毛糸玉、クッション材を試してみました。
ワークを外側から把持します。
仕様ですとアタッチメント直径6mm時はΦ24まで開くので、Φ20以下のワーク把持が目安かと。
ワークのバリエーションとして、ガラス素材、六角形の形状、かためと柔らかめの変形物2種類です。
問題なく把持できます。
さすがにクッション材は運転電流10%程度の把持でも若干変形してしまいました。
動画にはありませんが、運転電流を8%程度まで下げて試しています。さすがに開閉時の動きがぎこちないのでやめました。
こちらも問題なく把持しています。
このように3つ爪は、球体、円柱、円筒、六角形以上などのワークを、
3点支持で確実に把持できる点が優れていそうだと感じました。
ロボットのエンドエフェクタとして、候補の1つに加えてはいかがでしょうか。
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品