Q.AZシリーズ 多軸ドライバと株式会社キーエンス製PLCを使用しています。 原点復帰はどのように実行すればよいですか?
品名
オリエンタルモーター株式会社製ドライバ(MECHATROLINK-Ⅲ) : AZD2A-KM3、AZD2B-KM3、AZD3A-KM3、AZD4A-KM3
株式会社キーエンス製PLC(位置決め・モーションユニット) : KV-XH04ML、KV-XH16ML
原点復帰の実行は、次の2通りの方法があります。いずれかを実行してください。
-
位置決め・モーションユニットでの原点復帰
位置決め・モーションユニットの原点復帰要求リレー[先頭リレー番号+310+400×(軸番号-1)]をONにして実行します。
原点復帰の方法については株式会社キーエンス製 KV STUDIOの原点復帰方法で選択します。
それぞれの設定の詳細については、株式会社キーエンスのマニュアルでご確認ください。
- Z相ありの場合、停止時は必ずしもZSGはONとは限りません。
-
原点復帰運転中にRV-BLK(またはFW-BLK)をONにした場合は、ON中に逆転方向運転禁止状態(または正転方向運転禁止状態)となり、ドライバのPOWER、ALARMLEDが2回点滅します。
RV-BLK(またはFW-BLK)脱出後に点滅は解除されます。
LEDの点滅をオフにしたい場合は、当社サポートソフトMEXE02で設定を変更してください。

-
軸構成設定で「ステッピング」を選んだ場合はドグ式(押し当て)が使用できません。
ドグ式(押し当て)をおこないたい場合は、以下FAQをご覧ください。
-
高速原点移動による原点復帰
AZシリーズはABZOセンサ(バッテリレスのアブソリュートエンコーダ)を搭載しています。
そのため、センサを使わない原点復帰(高速原点移動)が可能です。高速原点移動をおこなうためにはあらかじめ原点を決めておく必要があります。
「1. 位置決め・モーションユニットでの原点復帰」をおこなうか、原点の位置をプリセットしてください。
原点位置をプリセットで決める場合は、以下のFAQをご覧ください。
<補足>
AZシリーズ 多軸ドライバには「ORIENTAL MOTOR固有の方式」の原点復帰機能が搭載されています。
ただし、この方法は位置決め・モーションユニットのモードを切り替える必要があるため、原点復帰については上記の1か2のいずれかの方法を使用することを推奨します。
参考までに、以下に「ORIENTAL MOTOR固有の方式」で原点復帰をおこなう場合の手順をご紹介します。
実行する場合は、位置決め・モーションユニットの制御をMECHATROLINK-Ⅲのコマンドモードに切り替えて原点復帰コマンド(ZRET:3Ah)を発行して実行します。
サーボコマンド入出力信号(SVCMD_IO)の31ビット目(VSO16)の設定で、原点復帰コマンドを使用した場合の、原点復帰の方法が決まります。(0の時 : MECHATROLINK-Ⅲの標準方式、1の時 : ORIENTAL MOTOR固有の方式)
サーボコマンド入出力信号(SVCMD_IO)
原点復帰に必要なパラメータは、当社サポートソフト MEXE02で設定してください。
(株式会社キーエンス製 KV STUDIOの登録モニタを使って説明します。CPUユニットはKV-7500、位置決め・モーションユニットはKV-XH04MLで先頭アドレスはR34000。)
- ①
-
動作許可リレー[先頭リレー番号+400×(軸番号-1)]をONにします。

- ②
-
制御モード変更(#2101)に400 : MECHATROLINK-Ⅲ コマンドモードを設定して、制御モード変更要求リレー[先頭リレー番号+505×(軸番号-1)]をONにします。
応答として、制御モード変更完了コード#119が400、制御モード変更完了リレーがONとなります。制御モード変更完了リレー
-
- KV-XH04MLの時
- 先頭リレー番号+2305×(軸番号-1)
-
- KV-XH16MLの時
- 先頭リレー番号+7105×(軸番号-1)

-
- ③
-
制御モード変更完了リレーがONになったら、制御モード変更要求リレーをOFFにしておきます。

- ④
-
SVCMD_IO(#2134、#2135)の31ビット目(VSO16)に1(ORIENTAL MOTOR固有の方式)を設定し、ゲイン切替リレー[先頭リレー番号+506×(軸番号-1)]をONにします。
MECHATROLINK-Ⅲの標準方式を使用する場合は0を設定します。
- ⑤
-
一括モニタを使用して、ML-Ⅲコマンドモード送信データの0バイト目、1バイト目(#42112)にサーボオンコマンド(31h)を設定します。

- ⑥
-
ML-Ⅲコマンド通信要求リレー[先頭リレー番号515×(軸番号-1)]をONにします。
ML-Ⅲコマンド通信完了リレーがONとなります。-
- KV-XH04MLの時
- 先頭リレー番号+2315×(軸番号-1)
-
- KV-XH16MLの時
- 先頭リレー番号+7115×(軸番号-1)

-
- ⑦
-
次のコマンドを送信するためML-Ⅲコマンド通信要求リレーをOFFにしておきます。

- ⑧
-
ML-Ⅲコマンドモード送信データの0バイト目、1バイト目に原点復帰コマンド(3Ah)を設定します。
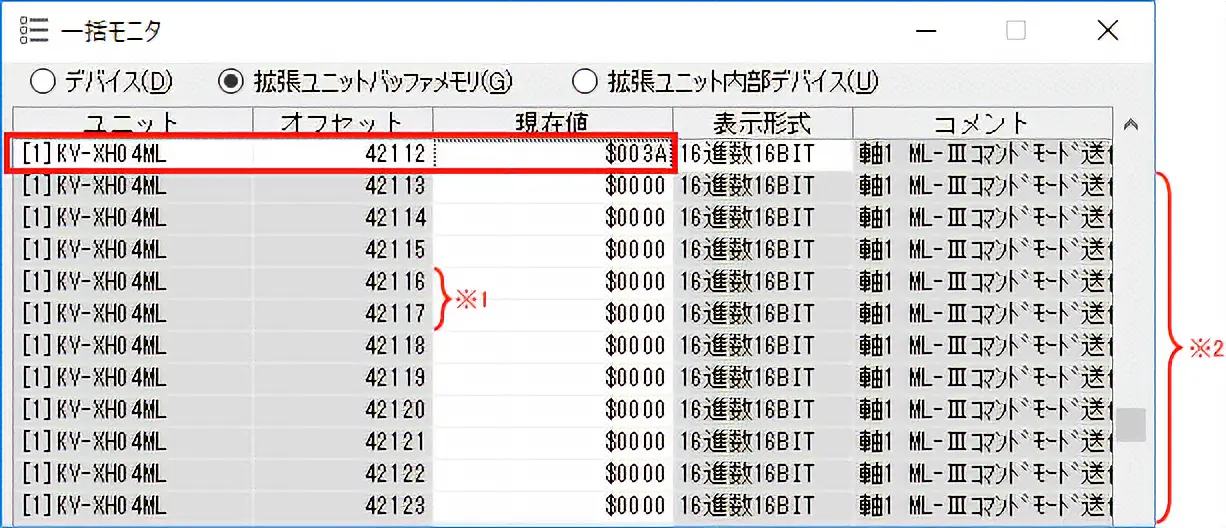
- ※1
-
本来であれば原点復帰コマンドではこの領域がSVCMD_IOの設定領域に当たりますが、実際はここにデータを設定してもSVCMD-IOの設定はできません。
設定するためには④のゲイン切替リレーによる設定が必要となります。
- ※2
- ORIENTAL MOTOR固有の方式の場合は設定は不要です。
MECHATROLINK-Ⅲの標準方式の場合は設定が必要となります。
- ⑨
-
ML-Ⅲコマンド通信要求リレーをONにすると原点復帰を実行します。

- ⑩
-
次のコマンドを送信するためML-Ⅲコマンド通信要求リレーをOFFにしておきます。

- ⑪
-
位置制御モードに戻します。②③の操作で#2101に0を設定して実行してください。
製品カテゴリ: αSTEP 、ネットワーク対応製品・コントローラ
機種・シリーズ: AZシリーズ 多軸ドライバ 、電動アクチュエータ AZシリーズ搭載 多軸ドライバ
内容: 使用方法・設定方法
FAQ No.: 480
メールする
メール開封後、内容を確認し、当社よりご連絡いたします。なお、お問い合わせの内容によっては、お電話をさしあげる場合がありますのでご了承ください。