ステッピングモーターとサーボモーターの使い分けって?許容慣性モーメントが大きいのはどっち?
このコラムでは、ステッピングモーターとサーボモーターの使い分けについて、負荷変動がある機構や負荷慣性モーメントが大きいワークを扱うケースを例にご紹介します。
ゲイン調整とは
機構による使い分け
-

ワーク質量が変動するリフターとか、クランク機構やカム機構みたいに負荷変動がある機構は、ゲイン調整しにくいと思うけどね。機構に関係なくゲイン調整不要で高い応答性を実現できるのがステッピングモーターのメリットだから、お客様の機構に合わせて提案するのがいいと思うわ。
クランク機構 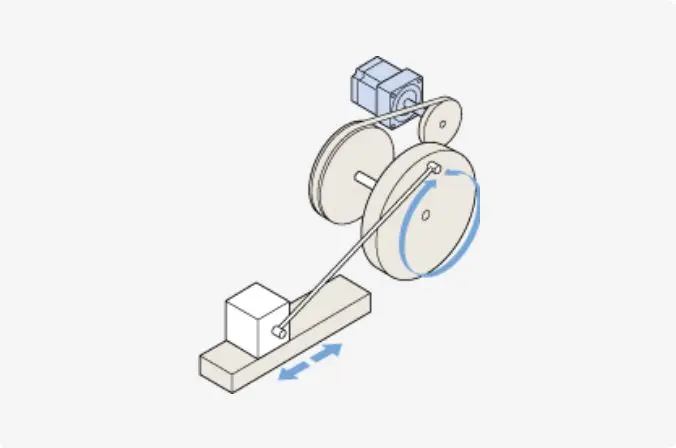
カム機構 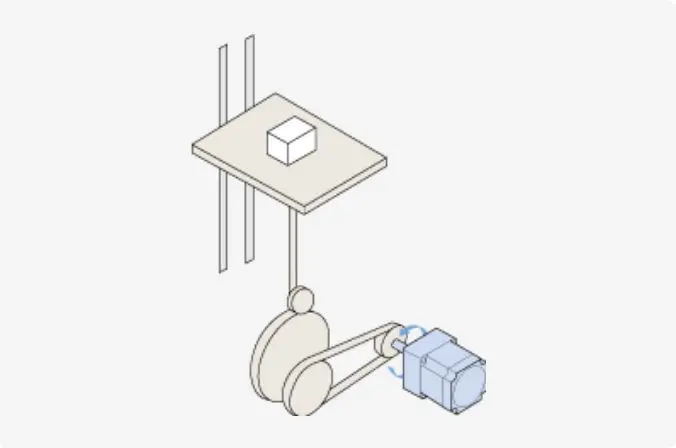
-
-
-
ワークによる使い分け
許容慣性モーメント値比較
| 取付角寸法 | サーボモーター※ | αSTEP | ||||
|---|---|---|---|---|---|---|
| ラインアップ [出力] |
ローター慣性 モーメント [×10-4kg・m2] |
許容慣性 モーメント [×10-4kg・m2] |
ラインアップ [サーボ同等型式] |
ローター慣性 モーメント [×10-4kg・m2] |
許容慣性 モーメント [×10-4kg・m2] |
|
| □42mm | 50W | 0.0174 | 0.87 | AZM46 | 0.055 | 1.65 |
| 100W | 0.029 | 1.45 | AZM48 | 0.115 | 3.45 | |
| □60mm | 200W | 0.162 | 8.1 | AZM66 | 0.37 | 11.1 |
| 400W | 0.291 | 14.55 | AZM69 | 0.74 | 22.2 | |
| □85mm | 750W | 0.948 | 47.4 | AZM911 | 2.2 | 66 |
※サーボモーターの数値は弊社製品をオートチューニングした場合の参考値です
今回のポイント
ゲイン調整とは
負荷に応じて最適な制御を行うための調整。サーボモーターの応答性や安定性は、負荷慣性モーメントの大きさやその変化、装置自身の機械剛性の影響を強く受けるため、機械剛性の低い装置や大慣性負荷を有する装置についてはゲイン調整が必要。
ステッピングモーターとサーボモーターの使い分け
ワーク質量が変動するリフターやクランク機構、カム機構のように負荷変動があるケース、負荷慣性モーメントが大きい場合はステッピングモーターの方が適していることもある。