AGV・AMR(搬送ロボット)の選定に必要な条件って?
このコラムでは、AGVやAMRの選定に必要な条件について、それぞれが選定計算にどのように関わるかを紹介します。
搬送ロボット用モーターの選定に必要な条件
重量が関わる要素
-

①装置の条件にあたる重量は、モーターの必要トルクや許容慣性モーメントを決めるために必要な要素よ。あと、停止時の耐荷重性能は許容ラジアル荷重で決まるわね。平行軸ギヤヘッドで許容ラジアル荷重をアップさせることは限度があるから、耐荷重性能を上げたいお客様には中空軸フラットギヤやフランジ出力ヘッドを紹介するのがいいと思うわ。フランジ出力ヘッド組付け時は1500N、中空軸フラットギヤは最大2040Nと高強度なのよ。
側面取付 中空軸フラットギヤヘッド 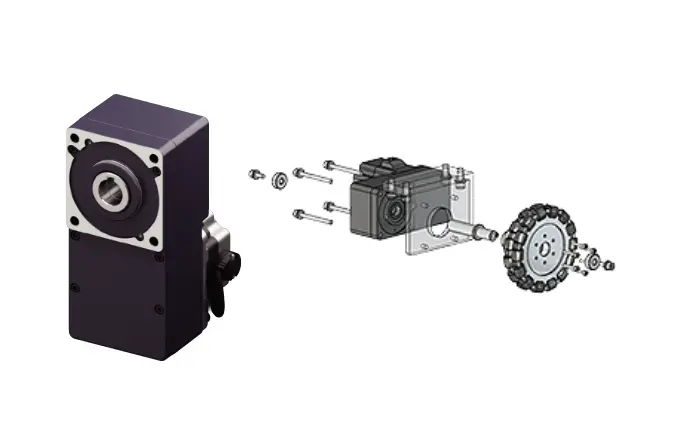
天面取付 フランジ出力ヘッド 
-
走行環境について
搬送軸数について
-
搬送軸数は駆動に必要なモーターの台数のことよ。使うモーターの台数によって必要トルクが変わるの。搬送ロボットの場合は2輪駆動が多いのよ。駆動は2輪のタイヤで行い、その周りに4輪のタイヤを配置して荷重を分散させる方法が一般的なの。駆動を2輪にすると、小回りがきくなど、搬送ロボットを走行させる場所に合わせて色々な設計方法を考えられるのよ。
2輪駆動イメージ 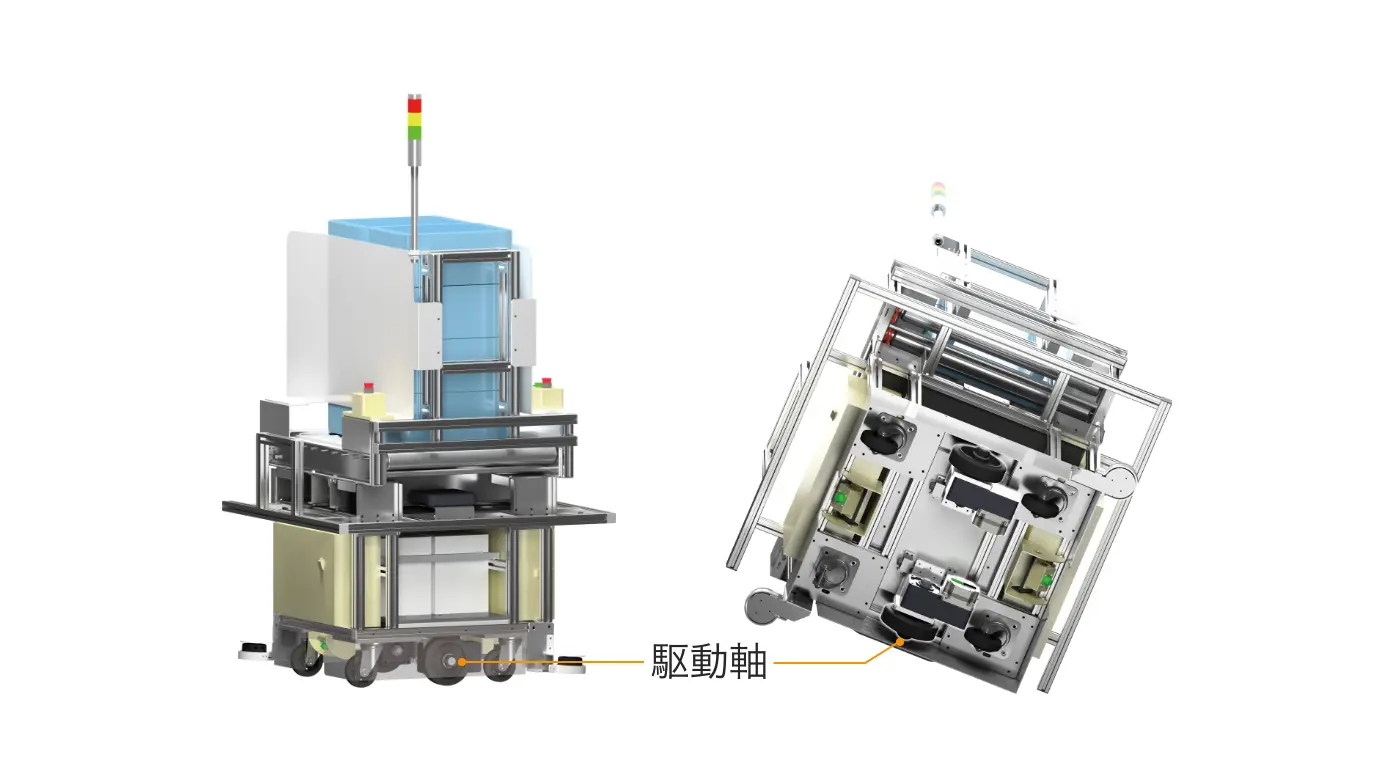
-
電源電圧について
走行スピードが関わる要素
今回のポイント
- 搬送ロボットを選定するには、装置の条件と運転条件が必要
- 装置の条件には、重量、走行環境、搬送軸数と車輪径、電源電圧が含まれ、選定計算する上で必要な要素となる