搬送ロボットへのソリューション提案

現在、あらゆる業界で少子高齢化による労働力不足、さらに新型コロナウィルス感染防止を目的とした非接触が課題となっています。このような背景から、比較的単純な「モノを運ぶ作業」の自働化や省人化へ向けた取り組みが加速しています。そして、その解決策として進められているのが搬送ロボット(AGV/AMR/GTP※)の導入です。
ブラシレスモーター BLVシリーズ Rタイプ/BLHシリーズはバッテリ駆動が可能なので搬送ロボットの車軸や搭載する搬送装置などへお使いいただけます。
さまざまな現場で求められる多種多様な走行パターンや搬送物への対応に貢献します。
- ※ AGV:Automatic Guided Vehicle.AMR:Autonomous Mobile Robot.GTP:Goods To Person
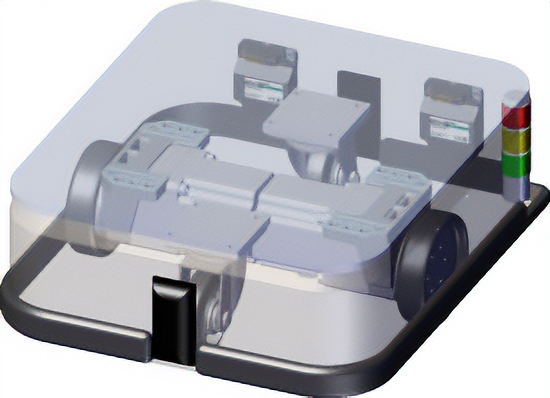
低床・スリム設計 : 荷姿や場所を選ばないボディに
棚やかご車に潜り込み自動搬送したい:低床設計
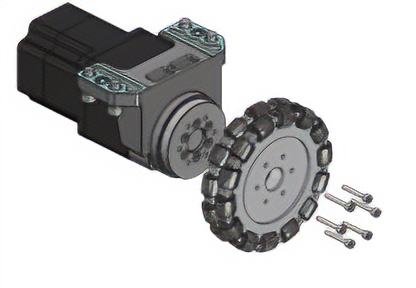
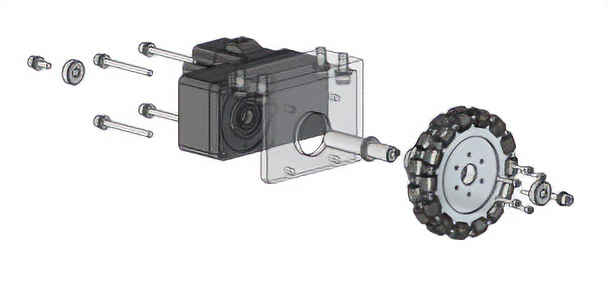
低床型の搬送ロボットは製品・部品棚やかご車に潜り込んでリフトアップ(またはチャック)できるため、搬送作業の自動化に効果的です。モーターの取り付けは天面と側面から選べ、設計の自由度を拡大できるため、低床設計に貢献します。
-
天面取付 フランジ出力ヘッド

-
側面取付 中空軸フラットギヤ
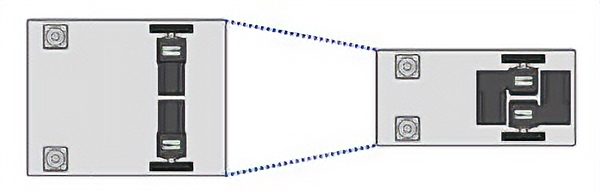
狭い通路でもすれ違い走行したい:スリム化
中空軸フラットギヤを交差して配置するとホイール間の距離が狭まり、車幅を抑えたスリムな設計が可能です。これにより、狭い通路でもすれ違いできるため、搬送ロボットの待機時間を削減し、稼働率向上に貢献します。
さらに低床・スリム化
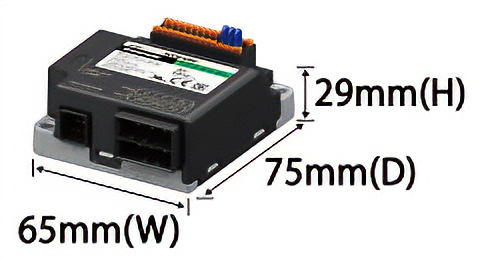
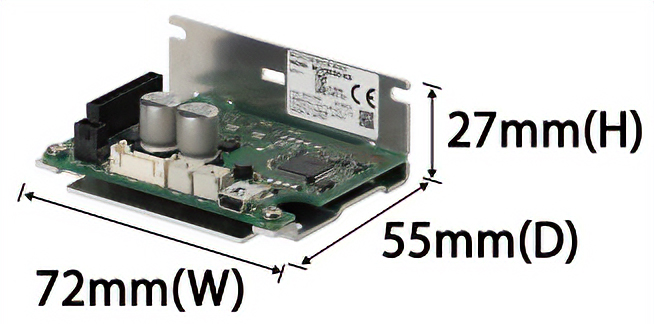
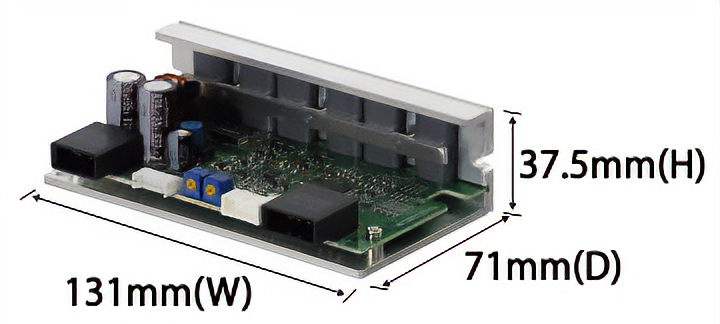
小型・薄型ドライバ
コンパクトサイズなので、バッテリや制御機器の設置場所など、レイアウトの自由度を拡大します。
-
BLVシリーズ Rタイプ
60W、100W、
200W、400W -
BLHシリーズ
15W、30W、50W -
100W -
電気的ブレーキ※
停止時に電気的なブレーキで停止位置を保持できるので、機械的ブレーキ(電磁ブレーキ)が不要です。モーターの全長を短くできるため、車幅を抑えた設計が可能です。
- ※ 通電時のみ有効です。
高耐荷重性能 : ワークの大型化、ロボットやコンベヤの搭載に対応
搬送ロボットの耐荷重性能は許容ラジアル荷重が影響します。フランジ出力ヘッド組付け時は1500N(153kgf)、中空軸フラットギヤは最大2040N(208kgf)と高強度です。これによりワークの大型化、ロボットやコンベヤの搭載といったニーズをサポートします。
| 減速比 | 5 | 10 | 15 | 20 | 30 | 50 | 100 | 200 | |
|---|---|---|---|---|---|---|---|---|---|
| フランジ出力ヘッド組付け時 | 100W※1 | 1500 | |||||||
| 中空軸フラットギヤ | 200W、 400W※2 |
1230 | 1680 | 2040 | |||||
| 100W | 900 | 1300 | 1500 | ||||||
| 50W、 60W |
800 | 1200 | |||||||
| 30W | 450 | 500 | |||||||
- ※1
- モーター軸回転速度が〜300r/minの値
- ※2
- モーター軸回転速度が100〜3000r/minまでの値

停止位置の設定・微調整 : 前後工程とスムーズに連携
指定の位置から残りの移動距離を設定したい:位置制御
ステッピングモーターやサーボモーターのように移動量を設定することができます。ガイド上のあらかじめ設定した距離の搬送はもちろん、自律走行中にセンサ入力位置から目標停車位置までの距離を設定するといった部分的な位置決め運転も可能です。

停止位置を微調整したい:速度制御
モーター軸の回転速度は1r/minから設定できます。これを搬送速度に置き換えるとホイール径が100mmの場合、約0.3m/minです。非常に低速で、オーバーランも小さく停止位置の微調整が可能です。
また最高回転速度は4000r/minなので、搬送速度アップによるタクトタイム短縮にも貢献します。

車両を固定し移載作業を安定化
機械的なブレーキ(電磁ブレーキ)や電気的なブレーキを搭載していますので、停止時に車両を固定することができます。移載時や傾斜でも車両のズレを抑えられるので、作業の安定化が図れます。


まっすぐ走る・避ける・止まる : 搬送ロボットの走行をフレキシブルに調整
搬送ロボットは床面の状態や突発的な障害物の回避など、さまざまな変化に対応できる走行性能が求められます。モーターからのフィードバック信号とそれに応じた各軸への指令をスムーズに実行できるため、まっすぐ走る・避ける・止まるの調整をフレキシブルにおこなえます。
高分解能センサ搭載
センサの制御分解能は最大36000P/Rです。走行状態や現在位置の詳細な把握が可能です。
ダイレクトデータ運転
運転中の急ブレーキ、速度復帰など、センサの情報に応じたフレキシブルな運転が可能です。
IDシェアモード・ブロードキャストモード
複数の車軸に対し同時に指令を送信できるため、動き出しの蛇行防止や急な旋回動作などが可能です。
それぞれの機能に関する資料もご用意しています。
調整時のお役立ち機能
各種設定はネットワーク
- BLVシリーズ Rタイプ
-
 、
、
- BLHシリーズ
-
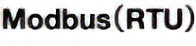
BLVシリーズ Rタイプ、BLHシリーズは「ROS」で製作したソフトウェアで制御できます。
当社ホームページにROSで動作させる場合のROSノード、マニュアル、サンプルコードをご用意しています。
- BLVシリーズ Rタイプは「ROS」で製作したソフトウェアで制御した場合、IDシェアモードは使用できません。
負荷に応じたゲイン調整
負荷に応じて、ゲイン(応答性)の調整が可能です。安定走行に貢献します。
状態のモニタ
サポートソフトのモニタ機能により、状態の把握ができます。BLVシリーズRタイプはトレースモニタも搭載しており、連続して最大1日の計測が可能です。これによりトラブルがあった際の原因究明に貢献します。
- ※ CiA®、CANopen®はCAN in Automation e.V. の登録商標です。
- ※ Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
対応製品
-
-
-
BLHシリーズはモーター単体での販売もおこなっております。
-

| ご紹介した特徴 | 出力 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 15W | 30W | 50W | 60W | 100W | 200W | 400W | |||
| 低床・スリム設計 高耐荷重性能 |
出力軸 | 中空軸フラットギヤ | ● ● | ● ● | ● | ● ● | ● | ● | |
| フランジ出力ヘッド | ● ● | ||||||||
| 小型・薄型ドライバ | ● ● | ● ● | ● ● | ● | ● ● | ● | ● | ||
| 電磁ブレーキ | ● ● | ● ● | ● ● | ● | ● | ||||
| 電気的ブレーキ | 負荷ホールド | ● | ● | ● | |||||
| S-ON | ● | ● | ● | ● | |||||
| 停止位置の 設定・微調整 |
位置制御 | ● | ● | ● | ● | ||||
| 速度制御 | 1〜4000r/min | ● | ● | ● | ● | ||||
| 80〜3000r/min | ● | ● | ● | ||||||
| 100〜3000r/min | ● | ● | ● | ● | |||||
| まっすぐ走る 避ける 止まる |
高分解能センサ | ● | ● | ● | ● | ||||
| ダイレクトデータ運転 | ● | ● | ● | ● | |||||
| データ送信 | IDシェアモード | ● | ● | ● | ● | ||||
| ブロードキャストモード | ●※ | ●※ | ●※ | ● | ● | ● | ● | ||
| 対応ネットワーク | Modbus(RTU) | ●※ | ●※ | ●※ | ● | ● | ● | ● | |
| CANopen | ● | ● | ● | ● | |||||
| ゲイン調整 | ● | ● | ● | ● | |||||
| サポートソフト | ● | ● | ● | ● | ● | ● | ● | ||
- ※ RS-485通信タイプのみ
自動仕分けシステムや無人搬送車、パレタイジングシステム等のマテハン機器において、生産性向上や省人化などの課題を解決する製品導入事例やご提案をまとめました。