AGV・AMRのモーター選定と制御に必要な「車輪の情報」って?
このコラムでは、AGVやAMRを自作する時のモーター選定と制御に必要な「車輪の情報」について紹介します。
モーター選定と車輪幅
選定条件
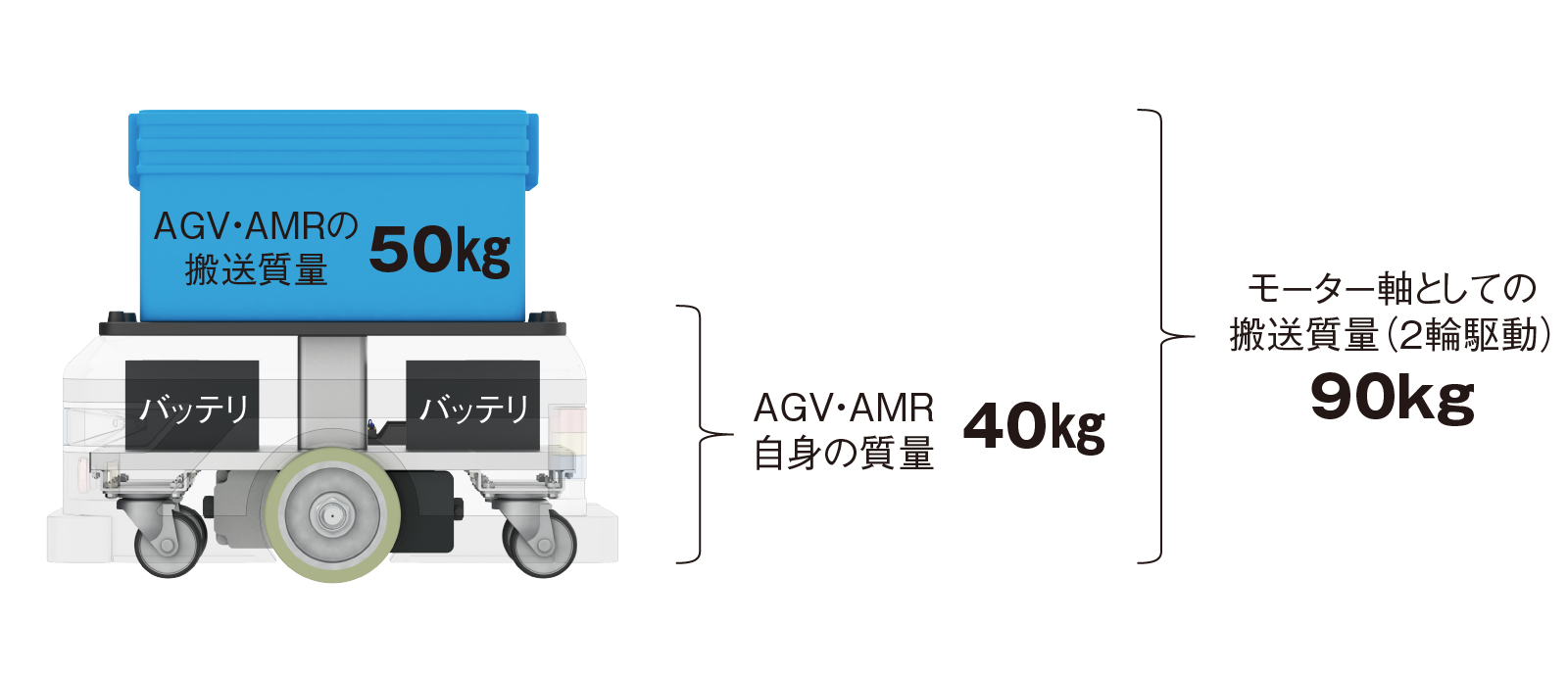
| 運転条件 | 搬送質量 | 50㎏ |

|
|---|---|---|---|
| 搬送速度 | 30m/min | ||
| 台車効率 | 0.9 | ||
| 外力 | 0N(無し) | ||
| 加速時間 | 2s固定 | ||
| 慣性 モーメント |
瞬時停止無し | ||
| 安全率 | 2以上 (負荷、瞬時最大ともに) |
||
| 路面 | 平坦、傾斜無し | ||
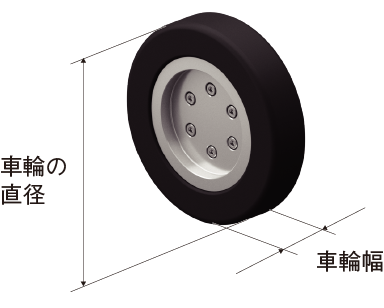
| 想定する車輪の条件 | 車輪径Φ | 100mm |
|
| 車輪幅 | 32mm | ||
| ゴム密度 | 1.2 | ||
| 摩擦係数 | 0.1(路面との摩擦係数) |

選定結果
| モーター | BLMR460SHK-GFV | 出力[W] | 60W |

|
|---|---|---|---|---|
| ギヤヘッド | GFS4G30FR | 減速比 | 30 | |
| ギヤヘッド/モーター | 質量 | 2.1㎏ | ||
| モーター軸としての搬送質量 | (2軸駆動) | 90㎏ |
|
|
| 搬送速度 | (最大可搬時) | 30m/min | ||
制御に必要な機構の車輪の情報
初期設定
| 車輪の選択 | 車輪の情報設定 | ギヤの減速比 |
|---|---|---|

|

|
|

|

|
-
-

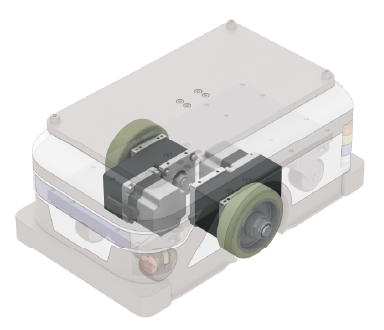
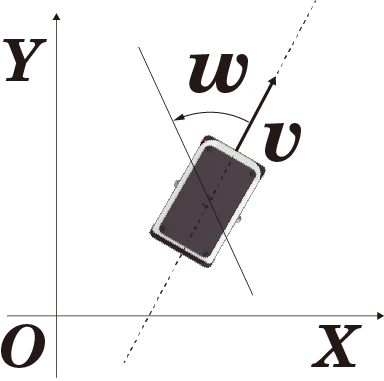
この座標の変換と左右の車輪の速度制御に加えてIMUセンサを搭載したモバイルロボットコントローラMVC01が発売されたので、是非、ソフト設計のお客様にご紹介してね。あと、忘れないで!BLVシリーズRタイプには、車輪を付けるだけで低床設計のAGV・AMRの足回りができる「駆動車輪用モーター」をラインアップ追加したの。機械設計と組み立ての手間を省くことができるから是非おすすめしてね。

今回のポイント
- 搬送ロボットを選定するには、車輪幅が必要。車輪幅が大きいほど慣性が大きくなって、モーターが必要とするトルクも大きくなる。また、床との設置面積が大きくなればグリップ力が上がって安定した旋回ができるようになる。
- 制御に必要な機構の情報としては、「車輪の半径」「左右の車輪の中心間の距離」「ギヤの減速比」の3点。この3つの値を使って、位置を制御するための座標への変換計算や、コーナーを回るときの左右の車輪の速度制御を行う。