ロボットコントローラMRC01で便利なアーチ動作やってみた!
やってみた!
~慎重なピック&プレイスには、設定の手間が省けて便利なアーチ動作~
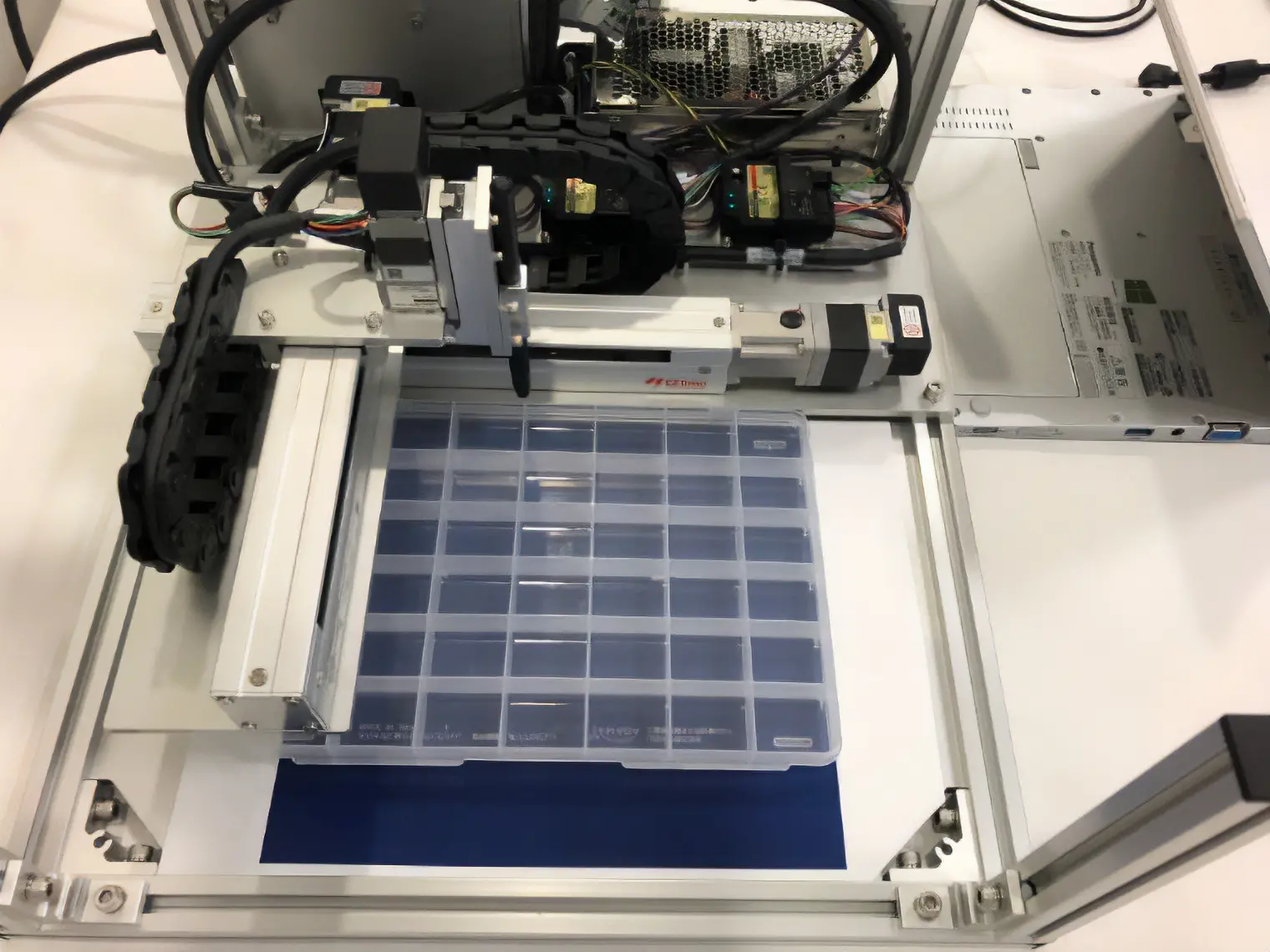
直交ロボットをイメージした卓上小型デモ機をつくりました。
X-Y-Z軸の3軸構成。 画像正面からみて X軸は縦方向、Y軸は横方向です。
デモ機サイズはおおよそ、奥行き 400mm ×幅 500mm ×高さ 270mm。
制御は、ロボットコントローラMRC01と、プログラミングソフトMRC Studioを使います。
各軸間はRS-485通信のModbus(RTU)制御です。MRC01はEtherNet/IPと接続可能です。
システム構成
最大ストロークは、X軸150mm、Y軸100mm、Z軸25mm。
リードは、X軸とY軸が6mmで、Z軸は1mmです。
速度上限はX軸とY軸が300mm/s、Z軸は20mm/sになります。
モータードライバは、AZD-KR2Dを使用。
このドライバは小型なので、モーターの隣にも設置できますし、
モーター~ドライバ間を10mまでなら離して配置できる自由度があります。
このデモ機はY軸が片持ちなのでZ軸で持てる重量はペンぐらい(100g程度)です。
今回は先端にスタイラスペンを取り付けています。
アーチ動作を見やすくするために、小物ケースを準備しました。
動作を上から見ると長方形を描く格好です。
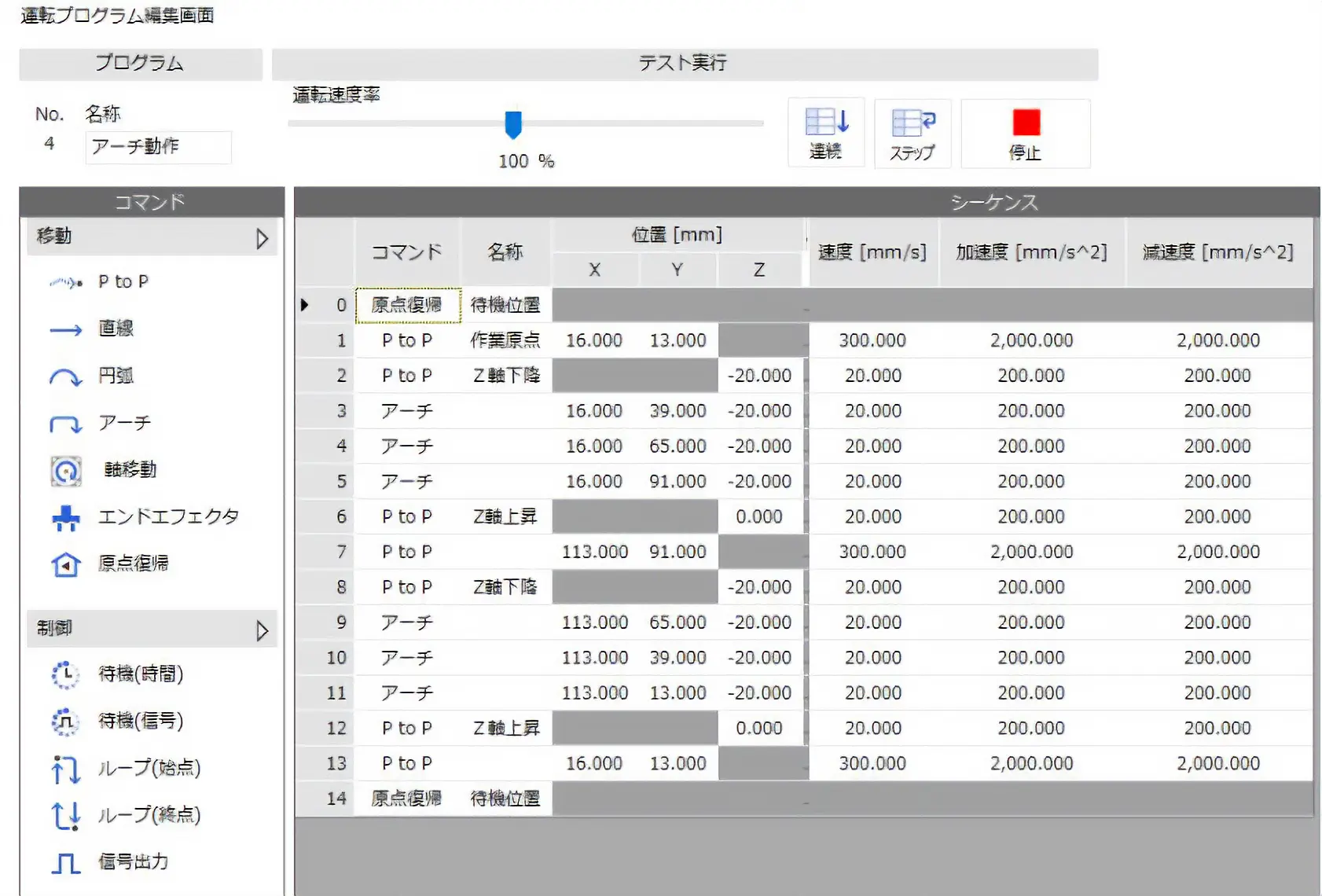
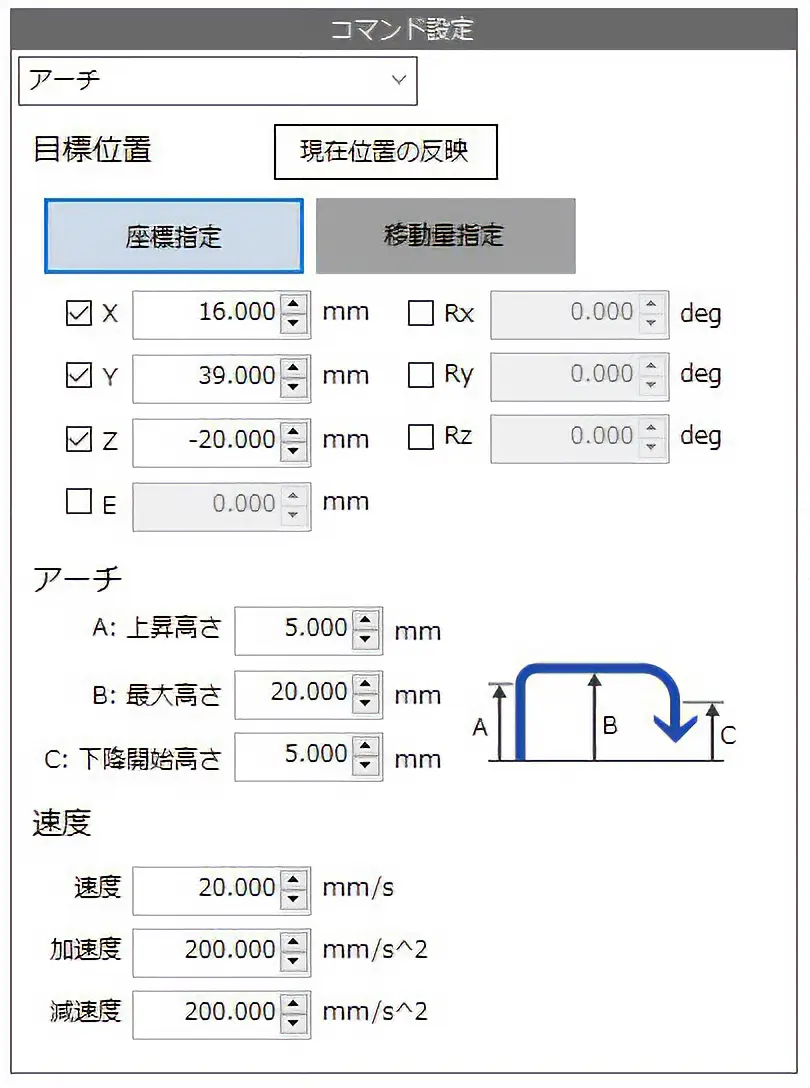
正面からみて横方向にアーチ速度20mm/sで3回アーチ動作、縦方向は高速300mm/sで運転します。
MRC Studioからのテスト実行のため、コマンド間で若干のタイムラグがあります。
慎重なピック&プレイス、丁寧な取り扱いが必要なワーク移載に使えそうです。
この動作プログラムをキャプチャしました。
上から順々にプログラムが実行されます。
動画にある一連のアーチ動作は、原点復帰を含めてプログラム行数15行で完結しており、
運転動作の流れが見やすいかと思います。
次にアーチ動作を使わないで同じような動きをプログラム記述した場合です。
今回は小型卓上デモ機ですので、機構の速度制限もありましたが、
Z軸を速度の速いアクチュエータを使うことで、アーチの高速化を実現できます。
- ※ デモ機を用いて実機確認したものですので保証値ではありません。
関連製品