研究開発・技術
幅広い産業分野への貢献を目指して、さまざまな「動き」のニーズに応える製品を研究開発しています。お客様の声に⽿を傾け、時代に応じた機能・性能を搭載した、魅力ある製品の研究開発に取り組んでいます。
基礎工学
磁気設計
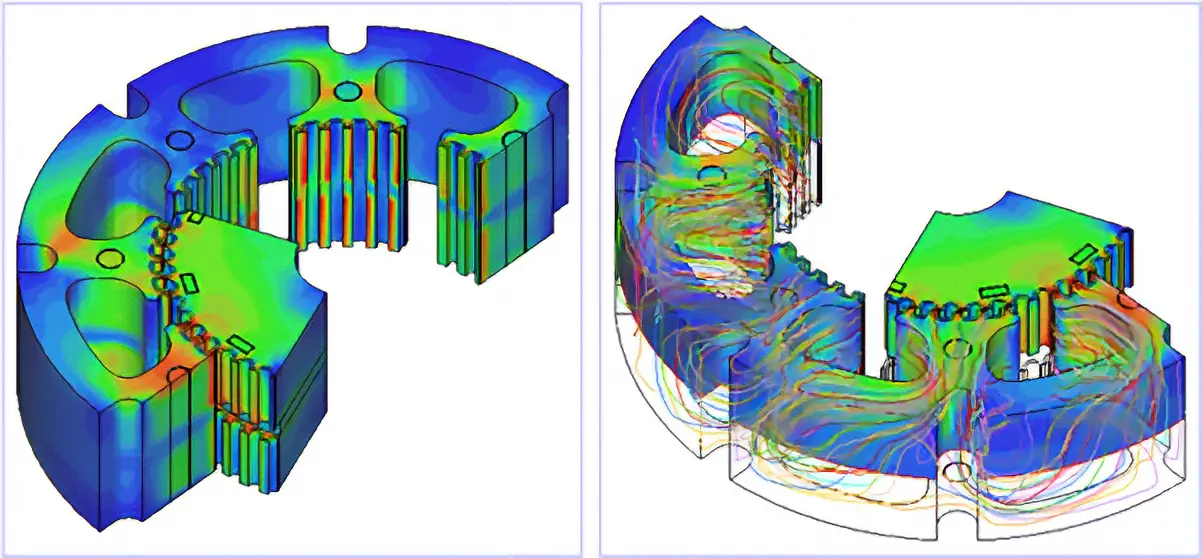
HB型ステッピングモーターの電磁界解析
ハイブリッド(HB)型ステッピングモーターのステーター(固定子)とローター(回転子)は、複雑な三次元磁気回路を構成しているため、磁束の流れが複雑となります。また、狭小ギャップ、微小ステップ、局所的な強い磁気飽和、加工歪など、電磁界解析を困難としている要素が数多く存在し、従来の手法では精度の高い解析が困難でした。独自の研究により、材料の正確な磁気特性データや、磁気特性劣化の影響を、解析条件に加えることで、より精度の高い電磁界解析が可能となりました。新商品開発や製品改良に活用されています。
モーター制御設計
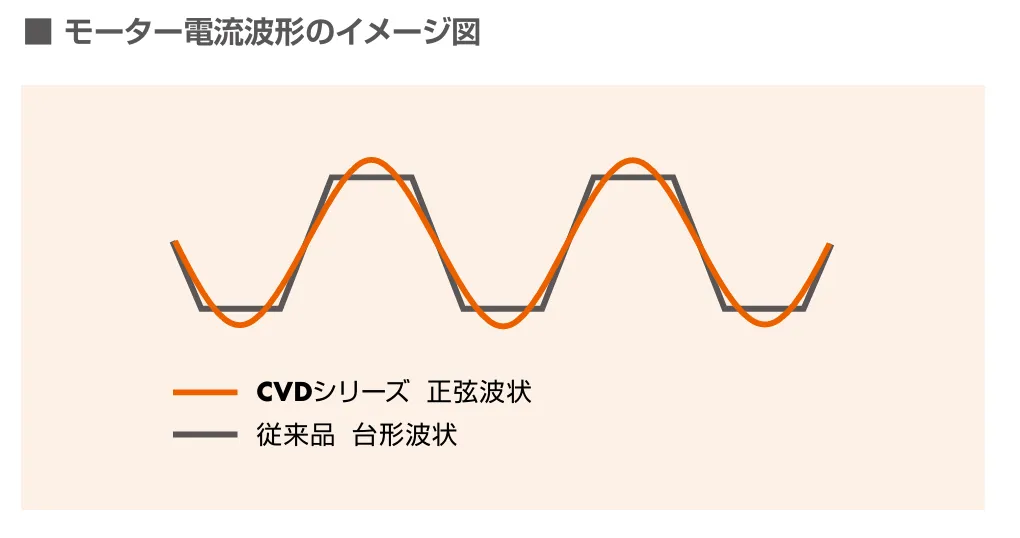
モーター制御による低振動技術
ステッピングモーターは、センサーを使用せずに位置決めが可能という特長を持つ一方で、構造上、回転時に振動が発生しやすいという課題があります。オリエンタルモーターでは、モーターに流れる電流を精密に制御することで、低振動性能に優れた設計を実現しました。従来のマイクロステップ駆動技術に加え、当社独自の正弦波駆動制御を採用することで、滑らかな動作と高応答・高精度な位置決めを両立。さらに、振動や騒音を抑えることで、モーターのトルク特性を最大限に引き出し、静音性が求められる環境でも安定した運用が可能です。
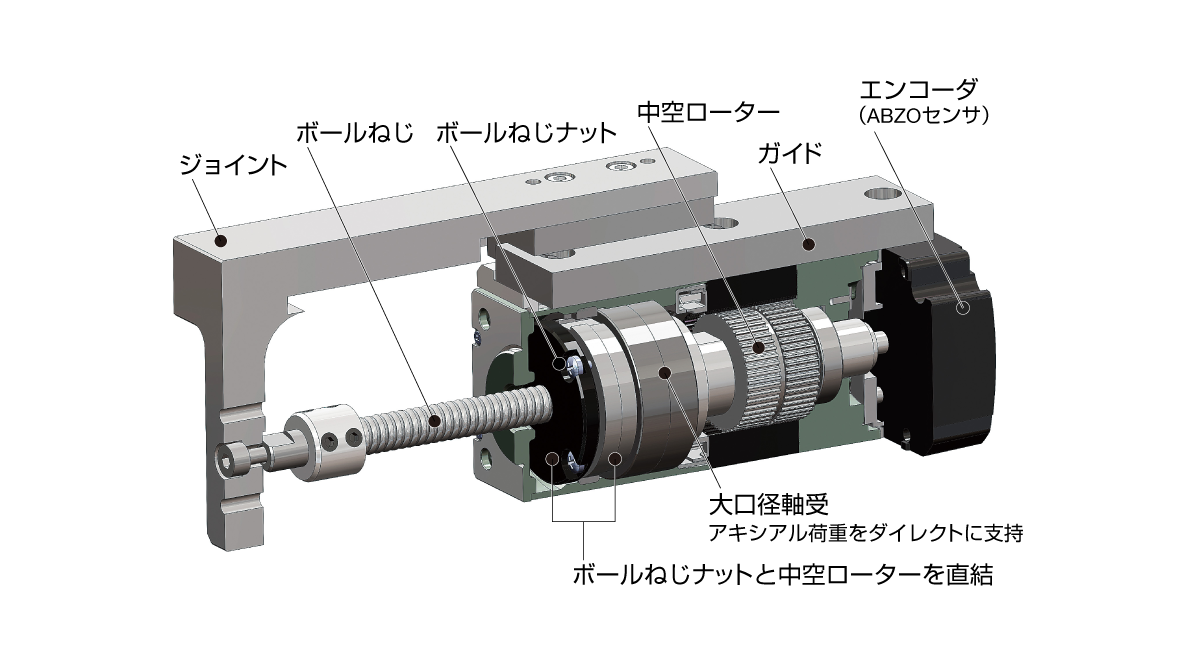
アクチュエータ設計
オリエンタルモーターのアクチュエータやギヤヘッドは、モーターシャフトに直接歯切りを施すことで小型化を実現。DRシリーズのようにボールねじをモーター内部に組み込み一体化した製品も提供しています。各モーターの特性を最大限に活かせる機構として設計され、AZシリーズ搭載商品ではお客様がすぐに使用できるようアクチュエータとして最適化されたパラメータを設定済みでお届けします。これにより、導入後すぐにスムーズな運用が可能となり、装置設計の効率化に貢献します。
ロボット設計
より高度化する生産現場の自動化ニーズに応えるため、当社の強みである多種多様な製品群と幅広いコア技術を活かし、ロボット製品の開発に取り組んでいます。具体的には以下のような技術開発を進めています。
- 複数のモーターやアクチュエータを組み合わせた、多様な構造のロボット機構設計
- ロボットの構造モデルに基づいたリアルタイム性の高い高精度軌跡制御技術
- カメラや各種センサとロボットを連携させたシステム開発、自律走行技術の開発
- ロボットの動作検証用のシミュレーションソフトウェアの開発
これにより複雑で多様な動きを実現し、お客様の課題解決にダイレクトに貢献します。

テクニカルレポートRENGA
RENGAは1966年3月に第1号を発行して以来、お客様のお役に立つ技術情報やオリエンタルモーターの研究開発に関する取り組みをお伝えしているテクニカルレポートです。(論文形式)