サーボモーター
KXRシリーズ

- 出力 400 W/750 W
- 高速・高応答・高分解能で、装置性能の向上に貢献
- ギヤヘッド(減速機)などの周辺機器もラインアップ
- 実働5日の短納期出荷対応
- 高速ワーク搬送から高精度位置決めまで幅広い用途に対応
特徴 | サーボモーター KXRシリーズ
高速・高応答・高分解能で、装置性能の向上に貢献
様々な業界・用途で求められる機能や特性を高い水準で備えています。
- タクトタイム短縮により、装置の生産能力向上に貢献
- 高精度動作により、装置の検査精度や加工精度向上に貢献
-
最高速度 7000 r/min
位置決め時間の短縮により、装置の生産能力向上を実現します。
-
エンコーダ分解能 26 bit
滑らかな動き、細かい指令にも追従した動きにより、装置の加工精度向上に貢献します。
-
速度周波数応答 3.5 kHz以上
指令に対する応答性が高まり、装置の加工精度・生産能力向上に貢献します。
-
外付けバッテリ不要
外付けバッテリ不要(バッテリレス)でモーターの位置情報を保持できます。
-
EtherCAT/FSoE※
EtherCATによる高速通信とFSoE対応の安全システムに対応します。
-
安全機能搭載※(STO、SS1-t)
安全停止を最適化し、人の安全確保と設備設計の自由度向上に貢献します。
- ※STO、SS1-t、FSoEは今後搭載予定の機能です。
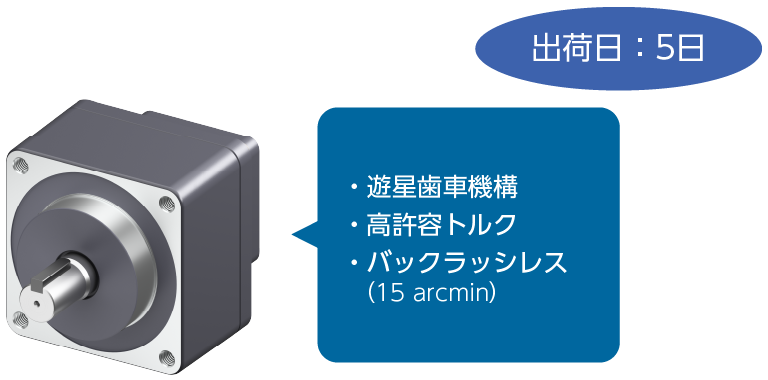
モーター・ドライバ・ギヤヘッド(減速機)を5日※で出荷
モーター・ドライバ・ギヤヘッドなど装置に必要な製品一式を、短納期で出荷します。
- 納期を気にせず、設計期間の確保が可能
- 短納期案件やトラブル時のモーター交換にも素早く対応
- ※ご注文日を含めて5日目(土日祝日除く)に出荷(3台まで)
- 一部ケーブル長については、5日以上の納期で出荷
周辺機器のラインアップにより、設計・発注の手間を削減
ギヤヘッドをはじめ、装置構成に必要な周辺機器をラインアップ。
- 技術相談、見積もり、発注などの窓口統一により、設計・発注の手間を削減
-
減速機 PSギヤヘッド
タイプ 適用モーター出力
[W]取付角寸法
[mm]減速比 最大回転速度
[r/min]定格トルク
[N・m]
400 90 5、10、25 減速比
5:1100
減速比
10:550
減速比
25:2204.5、
9.5、23.5750 90 5 9.5 750 120 10、25 19、49 -
中空ロータリーアクチュエータ DGⅡシリーズ

タイプ 適用モーター出力
[W]取付角寸法
[mm]減速比 最大入力回転速度
[r/min]許容トルク
[N・m]
400 170 18 5500 16 750 200 30
設計・立ち上げ・保守まで、安心のサポート体制

簡単チューニングにより、早期立ち上げを実現
用途と求める応答性に応じて、複数のチューニング機能を備えています。
- 立ち上げ時間を短縮
- 初めての方でも簡単に調整が可能
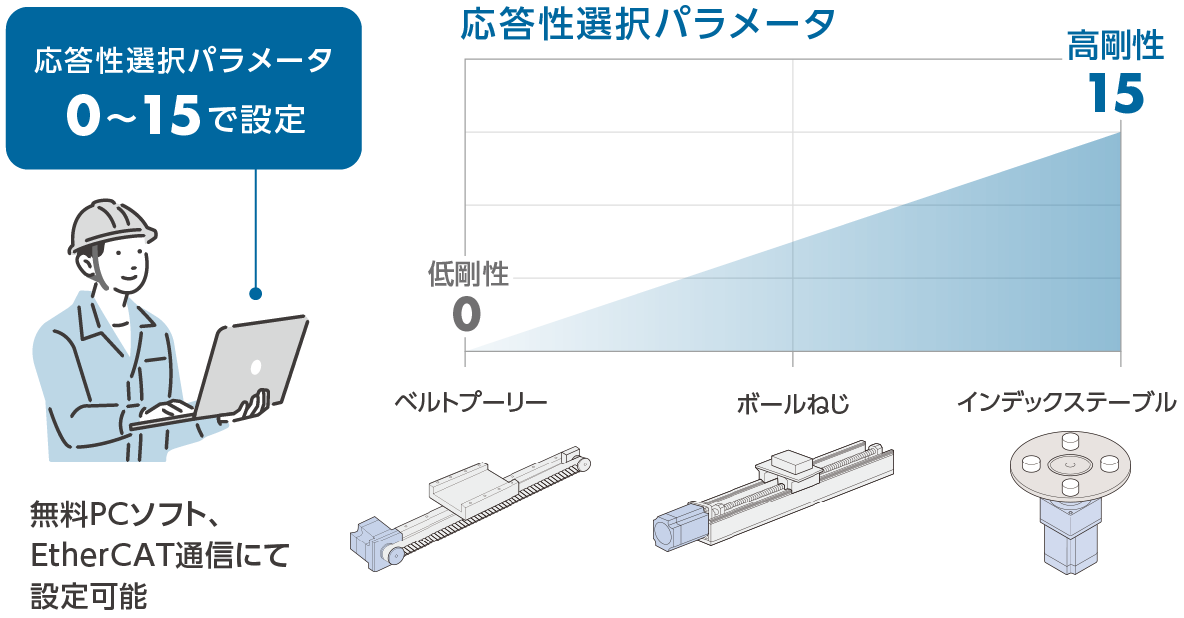
ワンパラメータチューニング
機構に合わせて16段階の応答性パラメータから1つ選ぶだけで調整が完了します。
複数のパラメータ調整作業が不要になります。
UPD(User Profile Drive-based)チューニング
実際の機構や運転条件と同じ状態で、最適なパラメータを自動調整するチューニング機能です。機能を有効にして実運転をEtherCAT通信で繰り返すことで、最適パラメータを自動で設定します。

すべてユーザー側で実施
- 動作指令
- 結果確認
- パラメータ調整

ユーザー側で実施
- 動作指令(EtherCAT)
ドライバ側で自動実施
- 結果確認
- パラメータ調整
安全機能搭載で、安全設計をシンプルに STO、SS1-t、FSoEは今後搭載予定の機能です
STO(Safe Torque Off)機能により、省配線/省スペース化を実現
モーターへの電力供給を遮断する、STO(Safe Torque OFF)機能を搭載予定です。
モーターへの通電を遮断することで、装置可動部の意図しない動作を防止し、人への危険リスクを低減します。
- コンタクタが不要になるため省配線、省スペース化に貢献


SS1-t(Safe Stop 1)機能により、制御停止後、動力を遮断
指定した時間内に減速制御による停止をおこない、動力遮断をおこなうSS1-t(Safe Stop 1)機能を搭載予定です。
- 緊急停止時の各モーターの同期ズレを防止し、製品や機構の破損を防ぐことが可能

SS1-tが有効になると、指定した時間内に減速制御による停止をおこない、その後STO機能によってモーターへの電力供給を遮断します。
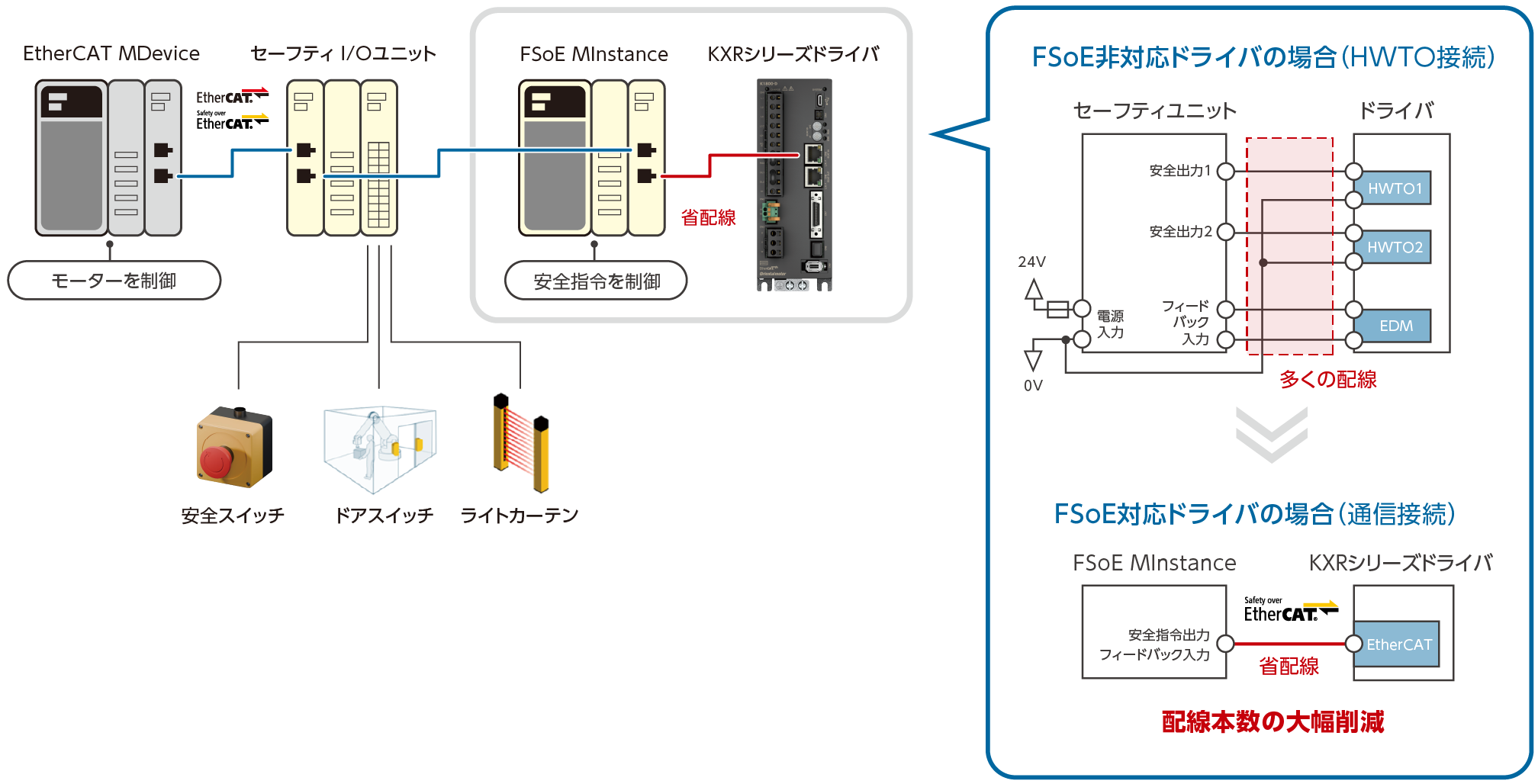
FSoE(Safety over EtherCAT)対応により、省配線/省スペース化を実現
安全通信プロトコルのFSoE(Safety over EtherCAT)に対応予定です。
安全制御とモーター制御を同一の通信にまとめることが可能です。
- 配線数の削減により、配線作業の手間削減や省スペース化に貢献
- 機能安全(STO、SS1-t)に対応し、高い安全性とシンプルなシステム構成を両立
安全機能の動作確認をご希望の際は、お近くの支店・営業所にお問い合わせください。
装置設計に役立つ便利な特徴、機能
装置設計や保守のムダを減らし、運用を安定させる実用機能を備えています。
-
コネクタ向き300 °回転により設計の自由度向上
コネクタ位置を300 °回転させることが可能です。
- 配線取り回しの自由度向上
- 筐体設計の制約を軽減

-
バッテリ不要で位置保持が可能
全固体電池内蔵のアブソリュートエンコーダにより、外付けバッテリ不要(バッテリレス)でモーター位置情報の保持が可能です。
- バッテリ不要のため、メンテナンスの手間やコストを削減

保持ブレーキ自動制御機能により、設計負担軽減/省配線化を実現
保持ブレーキが自動的に ON/OFF する機能を標準搭載しています。
励磁状態では保持ブレーキが自動的に解除され、無励磁状態では保持ブレーキが自動的に作動し、負荷を保持します。
- 別途ブレーキ用電源や制御回路の用意、設計が不要
- 配線作業の手間削減や省スペース化に貢献

ダウンロード
仕様外形図集のダウンロードはこちら
- 仕様外形図集
お問い合わせ
各種資料や技術的な相談はこちら
- お見積り、購入
- 技術相談
関連情報
ダウンロード
今後、リニューアル品を発売予定です。
パンフレット

取扱説明書
| 機種 | 言語 | ファイル名 |
|---|---|---|
| モーター | 日本語 | HM-60529J.pdf |
| ドライバ(仕様書) | 日本語 | K1800-D_ドライバ仕様書.pdf |
| ドライバ(通信編) | 日本語 | K1800-D_技術資料(通信編).pdf |
| ドライバ(調整編) | 日本語 | K1800-D_技術資料(調整編).pdf |
| PSギヤヘッド | 日本語 | HG-8044J.pdf |
| 中空ロータリーアクチュエータ DGⅡシリーズ | 日本語 | HL-80023J.pdf |
サポートソフト
ESIファイル
CADデータ
| 機種 | タイプ | 品名 | CAD番号 | |
|---|---|---|---|---|
| 2DCAD | 3DCAD | |||
| モーター | 400W 保持ブレーキなし | KXRM640AC | C282.dxf | C282.zip |
| 400W 保持ブレーキ付 | KXRM640MC | C283.dxf | C283.zip | |
| 750W 保持ブレーキなし | KXRM875AC | C284.dxf | C284.zip | |
| 750W 保持ブレーキ付 | KXRM875MC | C285.dxf | C285.zip | |
| ドライバ | EtherCAT | K1800-D | C286.dxf | C286.zip |
| PSギヤヘッド | 400W用 減速比5 | PSN90-5 | C277.dxf | C277.zip |
| 400W用 減速比10 | PSN90-10 | C277.dxf | C277.zip | |
| 400W用 減速比25 | PSN90-25 | C278.dxf | C278.zip | |
| 750W用 減速比5 | PSN90-5B | C279.dxf | C279.zip | |
| 750W用 減速比10 | PSN120-10 | C280.dxf | C280.zip | |
| 750W用 減速比25 | PSN120-25 | C281.dxf | C281.zip | |
| 中空ロータリーアクチュエータ DGⅡシリーズ | 400W用 | DGN170R2-18 | D7936.dxf | D7936.zip |
| 750W用 | DGN200R2-18 | D7929.dxf | D7929.zip | |