「つくばチャレンジ2025」に協賛・参加しました
オリエンタルモーターが協賛する「つくばチャレンジ」の本走行が12月7日(日)につくば市内で開催されました。
「つくばチャレンジ」は、つくば市内の遊歩道等、一般の人がいる日常の市街地で移動ロボットが自律走行する技術チャレンジです。
研究者や地域が協力しておこなう、先端技術への挑戦と公開実験の場として、2007年より開催されています。2025年度は、大学研究室や研究機関、企業、学生など全99チームが参加し、7チームが完走しました。


オリエンタルモーター製作の自律走行ロボット「Oriver」で参加
オリエンタルモーターは、チーム名「Orientalmotor」として、自社で製作した自律走行ロボット「Oriver(オリバー)」でつくばチャレンジに参加しました。
モバイルロボットコントローラMVC01で差動二輪を制御し、2D LiDARを用いたSLAM技術により安定した自律走行を実現しています。
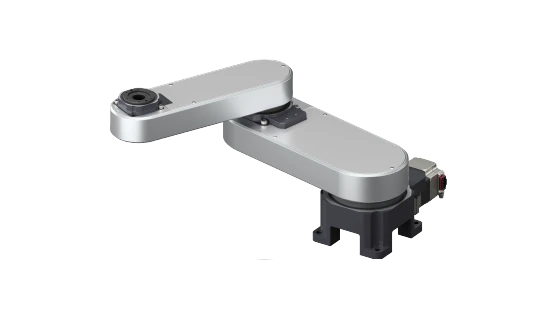
また、全方向に動作可能な水平多関節ロボットと電動昇降装置を、ロボットコントローラユニットMRCUシリーズで制御することでワーク搬送の機能を搭載しました。
「Oriver(オリバー)」は「つくばチャレンジ2025」において、約800 mの自律走行をおこないました。
ロボットの概要

| 最大並進速度 | 2.0 m/s |
|---|---|
| 最大回転速度 | 3.141592 rad/s |
| 最小旋回半径 | 0.55 m |
| 主電源 | DC24 V(50 Ah) |
| ロボット本体質量 | 100 kg |
| 稼働時間 | 6時間程度 |
| 構想~ハードウェア設計期間 | 3か月 |
|---|---|
| 組立期間 | 1か月 |
| ソフトウェア設計期間 | 3か月 |
| 試験期間 | 1か月 |
| 合計 8か月 | |
システム構成

走行部
(1)モバイルロボットコントローラMVC01
(2)ウェブカメラ
(3)2D LiDAR
(4)BLVシリーズRタイプ 駆動車輪用モーター 開発品
BLVシリーズRタイプ ドライバ BLVD-KRD
アーム部
(5)小型ロボットOVR 開発品
(6)電動昇降装置ELシリーズ 開発品
(7)ロボットコントローラユニットMRCUシリーズ MRCU5AK
(8)電動グリッパEHシリーズ EH4-AZAKH
(9)デプスカメラ
共通部
(10)PC
(11)モニタ
(12)非常停止スイッチ
(13)バッテリ