ラック・ピニオンシステム LBEシリーズ
LBE2F90MS-2-1

リニアドモーター/回路
この製品は現在販売のご案内を終了しています
| 製品種別 | 品名 | 定価(WEBショップ価格) | 出荷日 |
|---|---|---|---|
| リニアドモーター/回路 | LBE2F90MS-2-1 | 75,300円(64,000円) | 生産終了品(2024年3月31日 生産終了) |
付属品
- リニアドモーター、回路、接続ケーブル (1 m)、外部速度設定器 (信号線付)、取扱説明書
仕様
特性
データダウンロード
その他仕様
一般仕様
| 項目 | リニアドモーター部 | ドライバ部 | |
|---|---|---|---|
| 絶縁抵抗 | 常温常湿において連続運転後、コイルとケース間をDV500 Vメガーで測定した値が100 MΩ以上あります。 | 常温常湿において連続運転後、電源端子と保護接地端子間、電源端子とI/O 端子間をDC500 Vメガーで測定した値が100 MΩ以上あります。 | |
| 絶縁耐圧 | 常温常湿において連続運転後、コイルとケース間に50 Hz、AC1.5 kVを1分間印加しても異常を認めません。 | 常温常湿において連続運転後、電源端子と保護接地端子間に50 Hz、AC1834 V、電源端子とI/O端子間に50 Hz、AC3 kVを1分間印加しても異常を認めません。 | |
| 温度上昇 | 常温常湿において連続運転後、熱電対法でコイルの温度上昇を測定した値が50 ℃以下、ケース表面の温度上昇を測定した値が40 ℃以下です。 | 常温常湿において連続運転後、熱電対法で放熱板の温度上昇を測定した値が50 ℃以下です。 | |
| 使用環境 | 周囲温度 | 0 ~ +50 ℃ | |
| 周囲湿度 | 85 %以下(結露のないこと) | ||
| 標高 | 海抜1000 m以下 | ||
| 雰囲気 | 腐食性ガス、塵埃にないこと、放射性物質、磁場、真空などの特殊環境での使用は不可 | ||
| 振動 | 連続的な振動や過度の衝撃が加わらないこと JIS C 60068-2-6 正弦波振動試験方法に準拠 周波数範囲:10 ~ 55 Hz、片振幅:0.15 mm 掃引方向:3方向(X、Y、Z) 掃引回数:20回 |
||
| 保存環境※ | 周囲温度 | −25 ~ +70 ℃(凍結のないこと) | |
| 周囲湿度 | 85 %以下(結露のないこと) | ||
| 標高 | 海抜3000 m以下 | ||
| 絶縁階級 | EN規格:E種(120 ℃) | - | |
- ※ 保存環境は、輸送中を含めた短期間の値です。
ご注意
- リニアドモーターとドライバを接続した状態では、絶縁抵抗測定、耐圧試験をおこなわないでください。
ラック許容回転トルク (モーメント)
ラックにかかる回転トルクは、下表の値以下にしてください。
| 品名 | ラック許容回転トルク (モーメント) |
|---|---|
| LBE2タイプ | 0.3Nm 以下 |
| LBE4タイプ | 0.5Nm 以下 |
- 回転トルクは、必ず許容値以下にしてください。 回転トルクがかかりすぎると、ラックブッシュの摩耗が早くなります。
最大ラジアル荷重
| ストローク mm |
最大ラジアル荷重 N |
|||
|---|---|---|---|---|
| LBE2□90 | LBE2□300 | LBE4□50 | LBE4□300 | |
| 100 | 25 | 25※1 | 120 | 60※1 |
| 200 | 20 | 10※1 | 90 | 40※1 |
| 300 | 10 | 10※1 | 70 | 30※1 |
| 400 | 10 | 10※1 | 60 | 25※1 |
| 700 | - | - | 40 | 10※1 |
| 800 | ※2 | ※2 | - | - |
| 1000 | - | - | 15 | ※2 |
- ※1
- 運転速度は90mm/s以下でお使いください。90mm/sを超えて使用するときは、ラジアル荷重をかけないでください。
また、必ず外部にガイドを設けてください。 - ※2
- ラジアル荷重をかけないでください。必ず外部にガイドを設けてください。
- 品名中の□には、
ラック移動方向を表すFまたはBが入ります。
共通仕様 回路部
| 品名 | BLED3AM | BLED6AM | BLED3CM | BLED6CM | BLED3SM | BLED6SM | |
|---|---|---|---|---|---|---|---|
| 電源入力 | 定格電圧 V | 単相100-120 | 単相200-240 | 三相200-240 | |||
| 電圧許容範囲 | −15~+10% | ||||||
| 定格周波数 Hz | 50/60 | ||||||
| 周波数許容範囲 | ±5% | ||||||
| 定格入力電流 A | 1.3 | 2.0 | 0.8 | 1.2 | 0.45 | 0.7 | |
| 最大入力電流 A | 3.5 | 4.5 | 2.1 | 2.6 | 1.2 | 1.5 | |
共通仕様 動作仕様
-
基本モデル:リニアドモーター、ドライバの基本ユニットで使用したときに適用される仕様です。
-
拡張機能:別売りのデータ設定器(OPX-2A)を使用したときに適用される仕様です。
| 項目 | 基本モデル | 拡張機能 |
|---|---|---|
| ラック速度設定方法 |
次のいずれか1つによります。
|
次のいずれか1つによります。
|
| 加速時間・減速時間 | 加速時間・減速時間設定器による設定:0.2~15秒 |
次のいずれか1つによります。
|
| 多段速度設定方法 | 2速:内部速度設定器による1速と、 外部速度設定器(20kΩ、1/4W)または 外部直流電圧(DC0~5V、またはDC0~10V)による1速 |
次のいずれか1つによります。
|
| 入力信号 | フォトカプラ入力方式 入力抵抗5.1kΩ 内部電源により動作:DC17V±10% 接続可能な外部直流電源:DC24V −15~+20% 電流100mA以上 |
|
| 正転入力(FWD)、 逆転入力(REV)、 ストップモード選択入力(STOP-MODE)、 速度設定選択入力(M0)、 アラームリセット入力(ALARM-RESET)、 電磁ブレーキ解除入力(MB-FREE)、 回生抵抗サーマル入力(TH) |
汎用入力X0~X6(7点)へ任意に信号割付可能 正転入力(FWD)、 逆転入力(REV)、 ストップモード選択入力(STOP-MODE)、 速度設定選択入力(M0、M1、M2)、 アラームリセット入力(ALARM-RESET)、 電磁ブレーキ解除入力(MB-FREE)、 回生抵抗サーマル入力(TH)、 外部異常入力(EXT-ERROR) |
|
| 出力信号 | オープンコレクタ出力 外部使用条件:制御電圧 DC4.5~30.0V 電流40mA以下 スピードアウト出力:5mA以上 |
|
| スピード出力(SPEED-OUT)、アラーム出力1(ALARM-OUT1) |
汎用出力Y0、Y1(2点)へ任意に信号割付可能 スピード出力(SPEED-OUT)、 アラーム出力1(ALARM-OUT1)、 モーター運転中出力(MOVE)、 速度到達出力(VA)、 アラーム出力2(ALARM-OUT2)、 ワーニング出力(WNG)、 トルク制限動作中出力(TLC) |
|
| 保護機能 | 過負荷、 センサ異常、 初期時センサ異常、 過電圧、 不足電圧、 過速度、 過電流、 EEPROM異常、 回生抵抗過熱、 外部停止※2、 初期時運転禁止※3、 主回路出力異常※4 |
|
| 最大延長距離 | モーター・ドライバ間 20.4m | |
| 時間定格 | 連続 | |
- ※1
- 内部速度設定器による1速と、外部速度設定器(20kΩ、1/4W)または外部直流電圧(DC0~5V、またはDC0~10V)による1速です。
- ※2
- データ設定器(OPX-2A)を使用して、EXT-ERRORを割り付けている場合に限ります。
- ※3
- データ設定器(OPX-2A)を使用して、有効に設定した場合のみ発生します。
- ※4
- データ設定器(OPX-2A)を使用して、トルク制限値を200%未満に設定したときは発生しません。
トルク制限機能
別売りのデータ設定器(OPX-2A)を使用することにより、リニアドモーターの出力トルクに制限を設定することができます。
| 項目 | 仕様 |
|---|---|
| トルク制限設定方法 |
次のいずれか1つによります。
|
| トルク制限範囲 |
モーターの定格トルク値を100%としたとき、次の範囲でトルク制限値を設定します(初期値200%)。
|
ご注意
- 設定速度や電源電圧、モーターケーブル延長距離により、設定値と発生トルクの誤差が最大±20%程度生じます。
押し当て力 (参考値)
押し当て力は、別売りのデータ設定器(OPX-2A)を使用することにより、データモード · トルク制限値を設定することができます。
ご注意
- 上記は水平運転時の目安値です。 保証値ではありません。
- 垂直方向でご使用になる場合は、(負荷質量 + ラック質量)× 重力加速度分の外力が加わるため、その外力と推力との関係を考慮する必要があります。
ご使用に際しては実際の押し当て力を測定し、トルク制限値を設定してください。 - 押し当て運転は、押し当て力の条件(ラック速度、トルク制限値)内でおこなってください。 この条件を超えるとラックが当て止めされ、モーターが破損するおそれがあります。
オーバーラン (参考値)
ラック速度、負荷質量によってオーバーラン量が変化します。 使用条件を確認してから、ご使用ください。
- 品名中の □ には、ラック移動方向を表すFまたはBが入ります。
品名中の ■ には、ストロークを表す数字が入ります。
システム構成
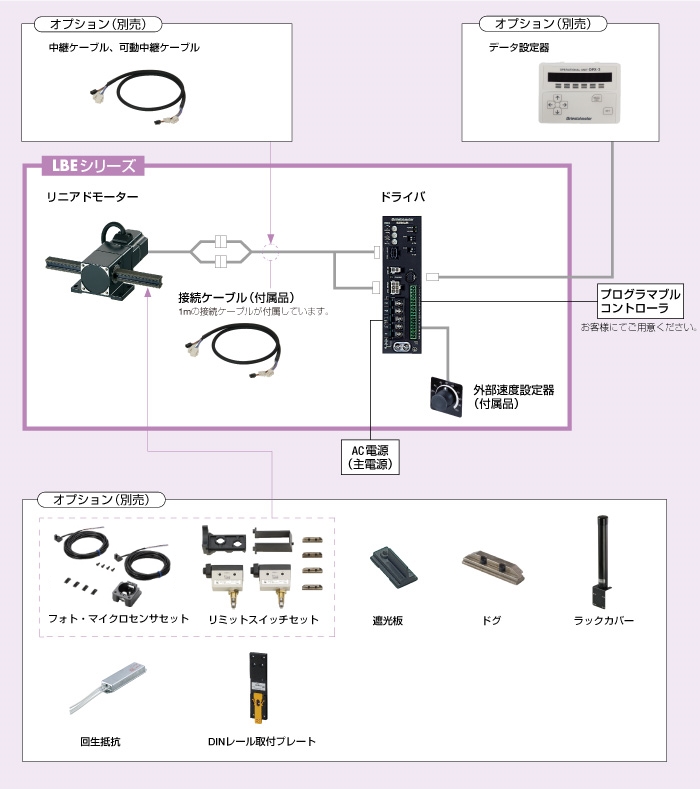
ケーブル・周辺機器
品名欄にチェックを入れて「ショップで見積・購入」への追加ができます。
close
close
close
close
close