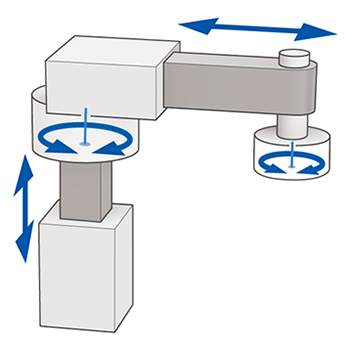
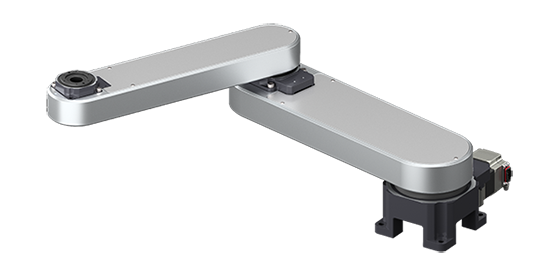
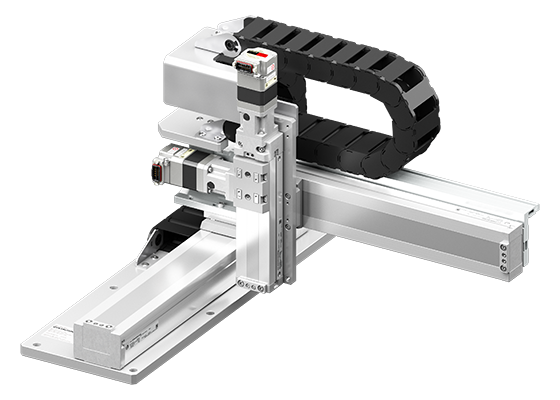
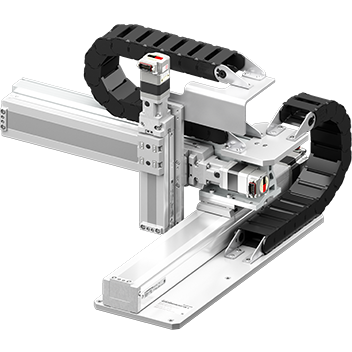
ロボットコントローラ MRC01 対応ロボットタイプ
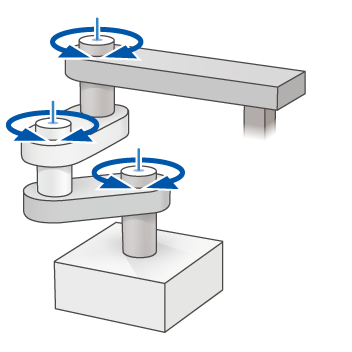
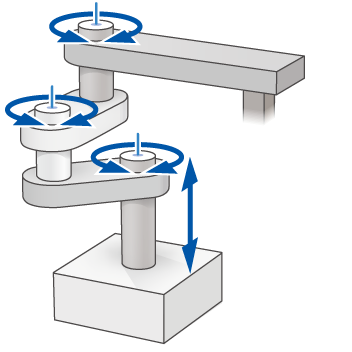
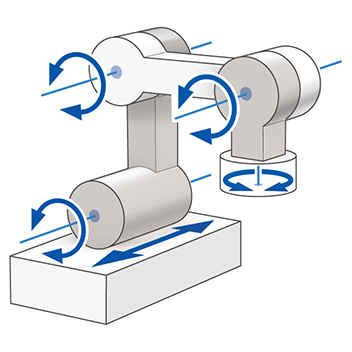
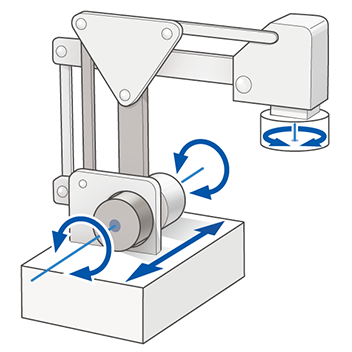
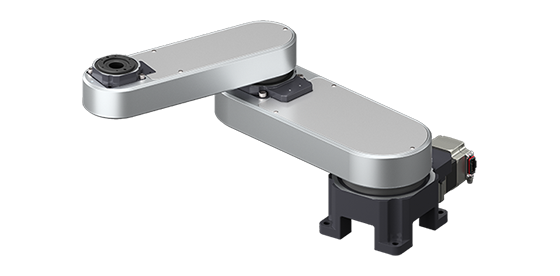
水平多関節
-
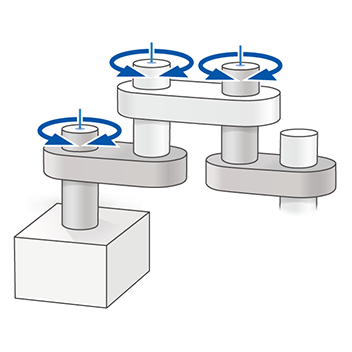
2リンク 昇降軸なし -
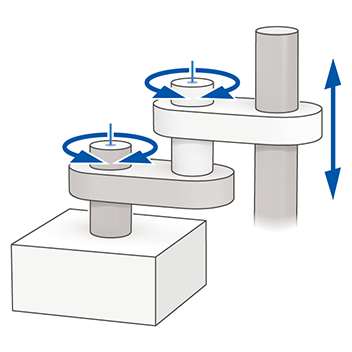
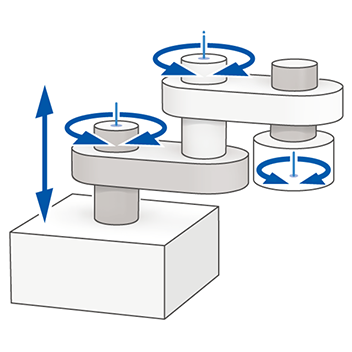
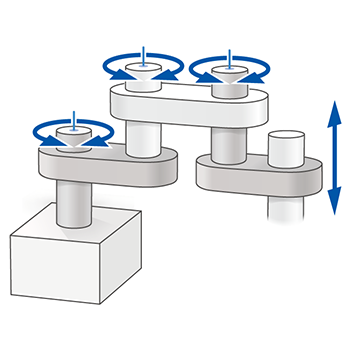
2リンク 先端軸昇降 -
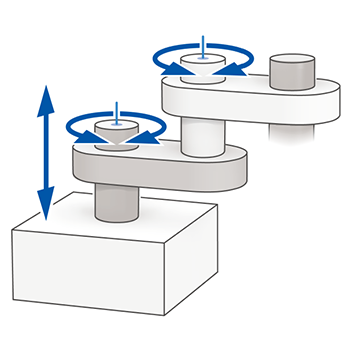
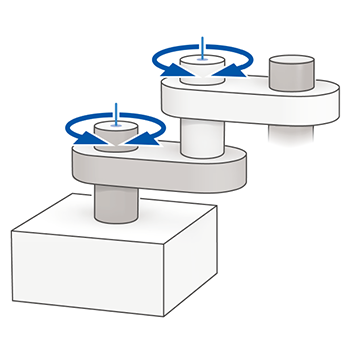
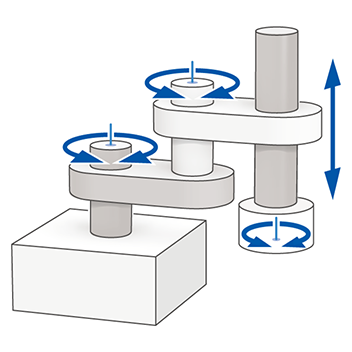
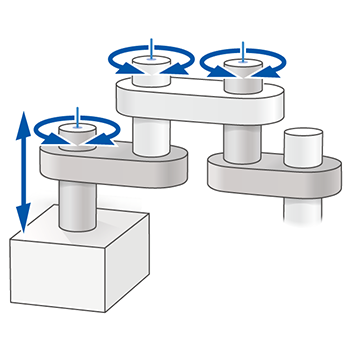
2リンク ベース軸昇降 -
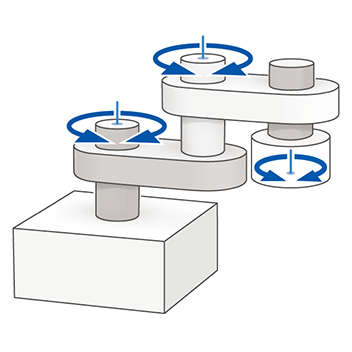
2リンク 昇降軸なし+Rz軸 -
2リンク 先端軸昇降+Rz軸 -
2リンク ベース軸昇降+Rz軸 -
3リンク 昇降軸なし -
3リンク 先端軸昇降 -
3リンク ベース軸昇降 -
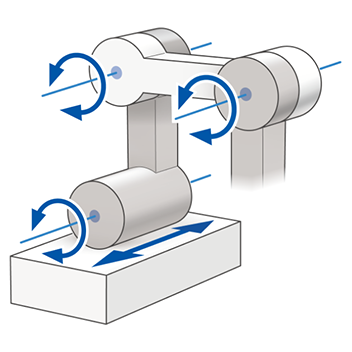
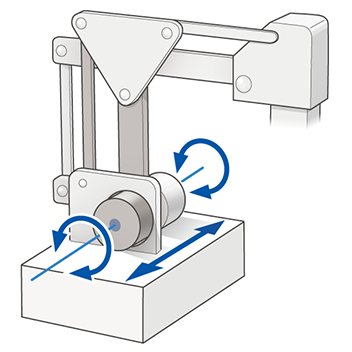
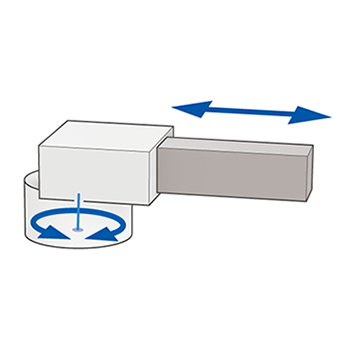
2リンク ベース軸直動
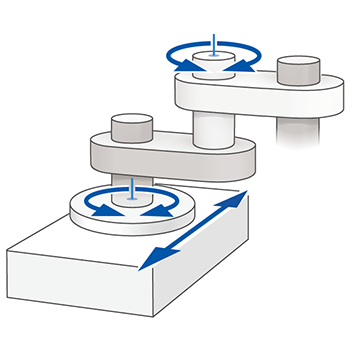
昇降軸なし -
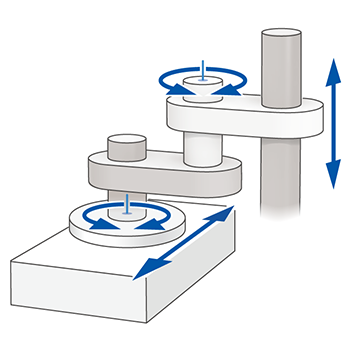
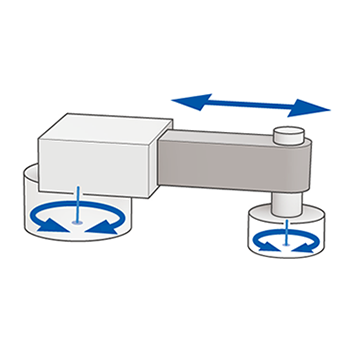
2リンク ベース軸直動
先端軸昇降 -
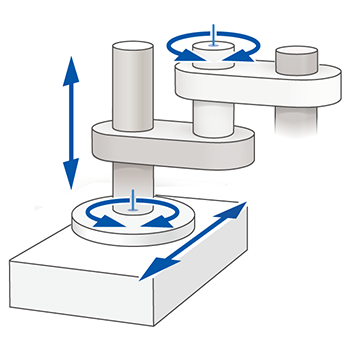
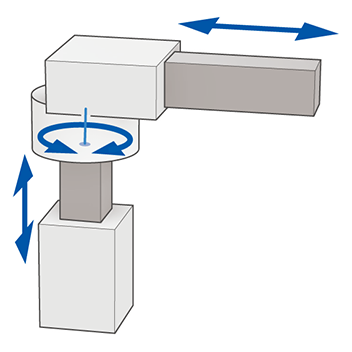
2リンク ベース軸直動
ベース軸昇降
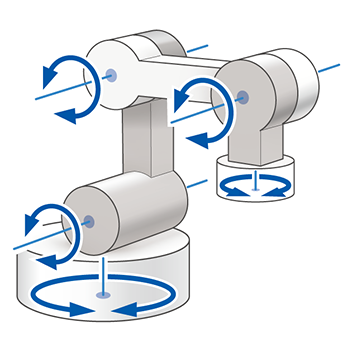
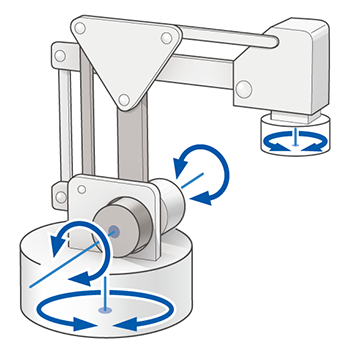
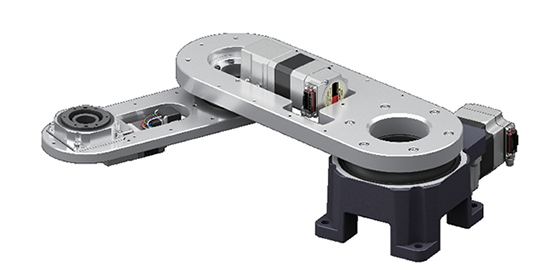
水平多関節 全方位
-
3リンク 昇降軸なし -
3リンク ベース軸昇降
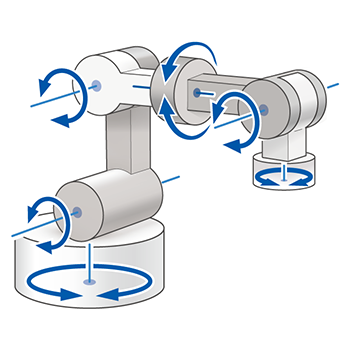
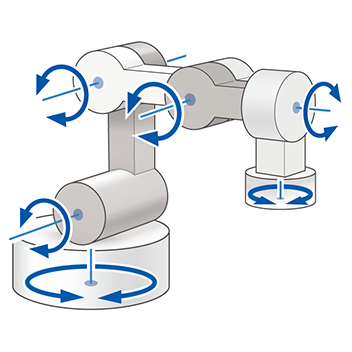
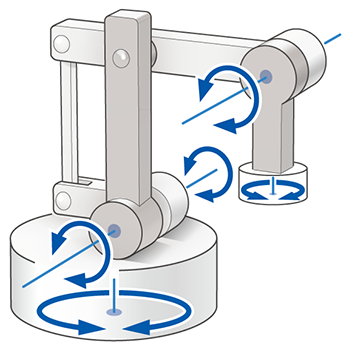
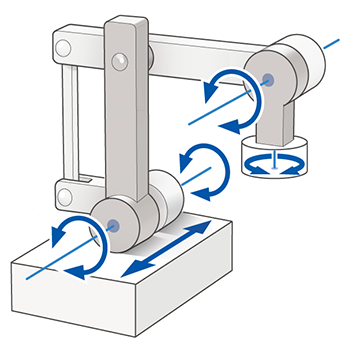
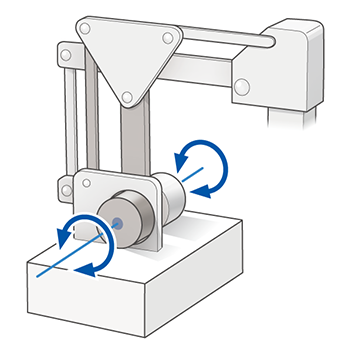
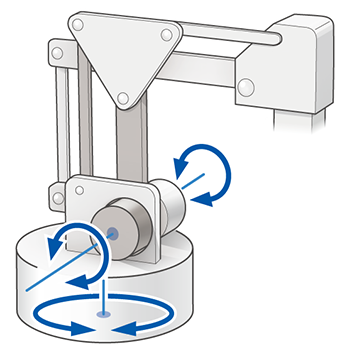
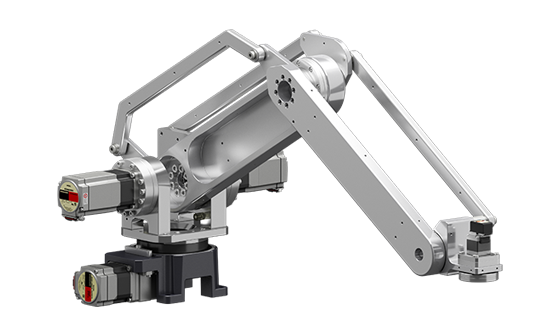
垂直多関節
-
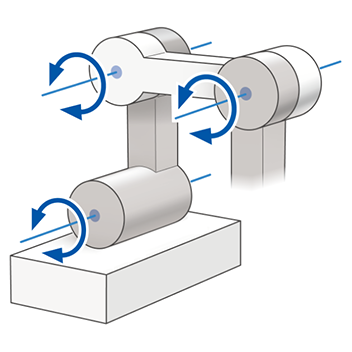
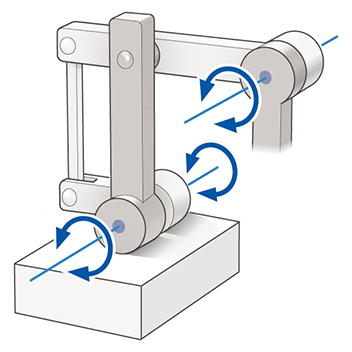
3リンク ベース軸なし -
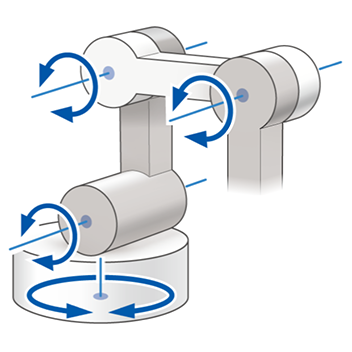
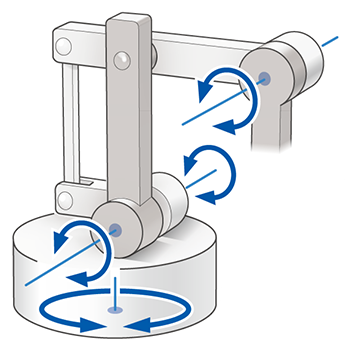
3リンク ベース軸旋回 -
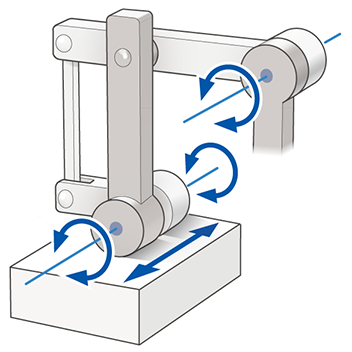
3リンク ベース軸直動 -
3リンク ベース軸旋回+Rz軸 -
3リンク ベース軸直動+Rz軸 -
6軸垂直多関節 モデル1 -
6軸垂直多関節 モデル2
パレタイザー
-
1リンク機構 ベース軸なし -
1リンク機構 ベース軸旋回 -
1リンク機構 ベース軸直動 -
1リンク機構 ベース軸旋回+Rz軸 -
1リンク機構 ベース軸直動+Rz軸 -
2リンク機構 ベース軸なし -
2リンク機構 ベース軸旋回 -
2リンク機構 ベース軸直動 -
2リンク機構 ベース軸旋回+Rz軸 -
2リンク機構 ベース軸直動+Rz軸
直交
-
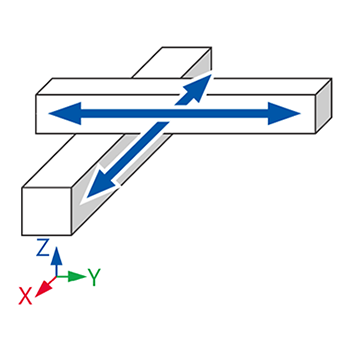
XY -
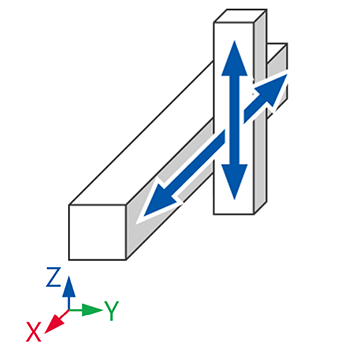
XZ -
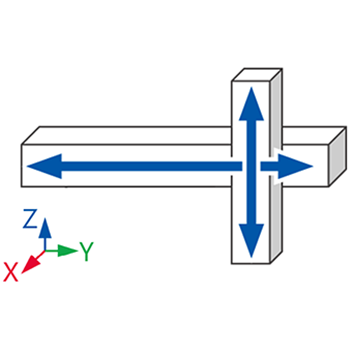
YZ -
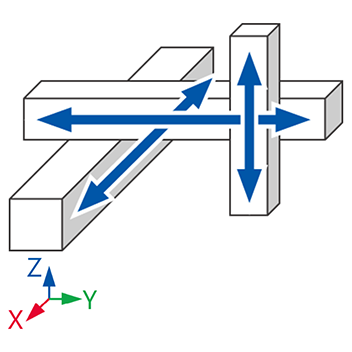
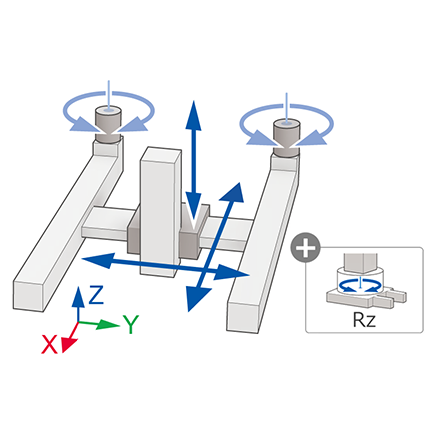
XYZ -
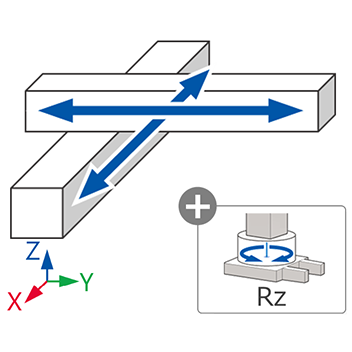
XY+Rz軸 -
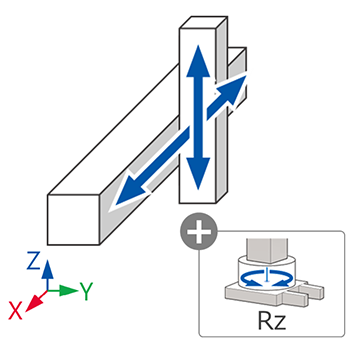
XZ+Rz軸 -
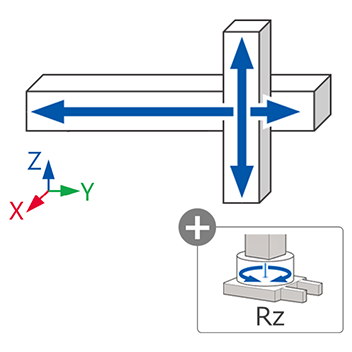
YZ+Rz軸 -
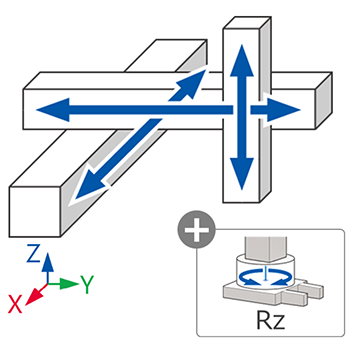
XYZ+Rz軸 -
平面ガントリ(XY) -
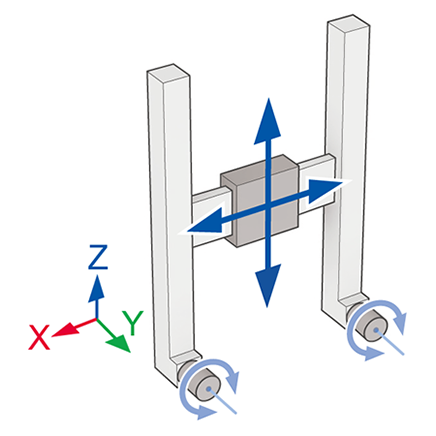
平面ガントリ(XZ) -
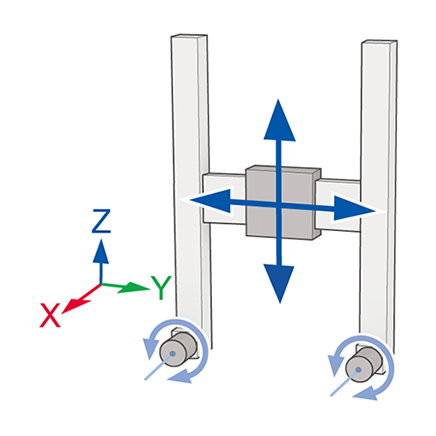
平面ガントリ(YZ) -
平面ガントリ(XYZ) -
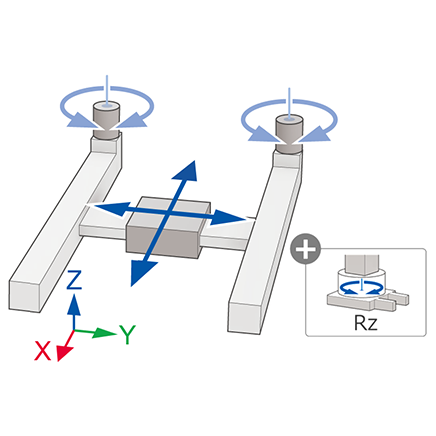
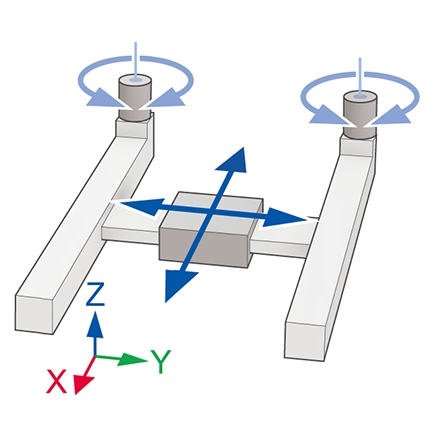
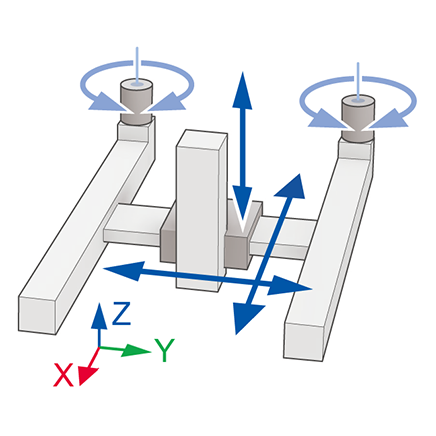
平面ガントリ(XY+Rz軸) -
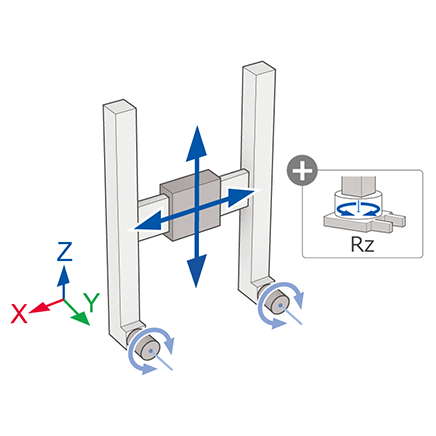
平面ガントリ(XZ+Rz軸) -
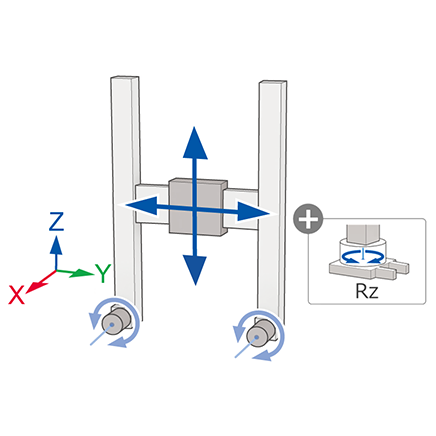
平面ガントリ(YZ+Rz軸) -
平面ガントリ(XYZ+Rz軸)
パラレルリンク
-
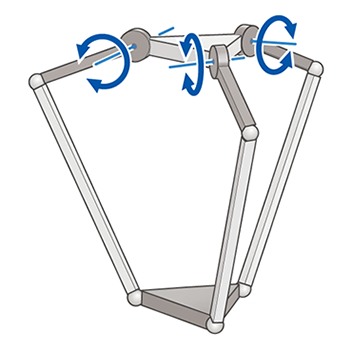
パラレルリンク -
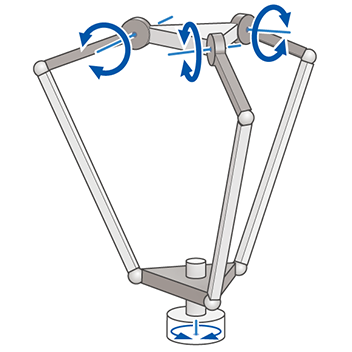
パラレルリンク+Rz軸
極座標/円筒座標
-
極座標 -
極座標+Rz軸 -
円筒座標 -
円筒座標+Rz軸
小型ロボット OVR
自動化・省人化の課題解決に、小型・軽量のロボットをご用意しています。
垂直多関節
-

OVR4048K5-V(4軸多関節) -

OVR4068K5-V(4軸多関節) -
OVR4088K5-V(4軸多関節)
-

OVR5035K1-V(5軸多関節) -

OVR6048K1-V(6軸多関節)
水平多関節
-
OVR3041K3-V(3軸多関節) -
OVR3046K10-H(3軸多関節) -
OVR3070K3-H(3軸多関節)
直交
-
OVR3AL030030Z10K-C(Lタイプ) -
OVR3AR030030Z10K-C(Rタイプ)
教育用ロボット Motion System Master
機械・ソフトの両面から学習できる、安価な教育用3軸小型卓上ロボットアームです。
-

MSE3039K1-V