パレタイジングシステムの生産性向上を実現する小型ロボットOVR 3軸直交ロボット
| 業種 | マテハン |
|---|---|
| 工程・装置名 | パレタイジングシステム |
| 課題 | 生産性向上、省人化、コスト削減 |
課題:手作業でおこなっていたパレタイジング工程の自動化を推進したい
従来の問題点・要望
- 手作業によるパレタイジングが作業者の負担増と作業ムラを招き、生産性向上の妨げとなっていた。
- 一般的な産業用ロボットは現場の作業に対してオーバースペックで、導入コストも高く自動化の実現を阻む要因となっていた。
解決策:小型ロボットOVR 3軸直交ロボットで、生産性の向上を実現
パレタイジングとは、小型工業部品をパレットに整然と配置する工程であり、部品メーカーの工場においては生産性向上の重要なポイントとなっています。現在、この作業は人手によっておこなわれているが、産業用ロボットによる自動化が検討されています。しかし、一般的な産業用ロボットのサイズや機能が過剰であるため、導入時のコストやスペースの面で課題があります。また、ロボット導入の経験がないことから、SIerへの依頼に伴う費用やスキル不足も懸念されています。
こうした課題に対して、小型で扱いやすい「OVR 3軸直交ロボット」を導入することで、パレタイジング工程の自動化と生産性向上を効率的に実現することが可能です。
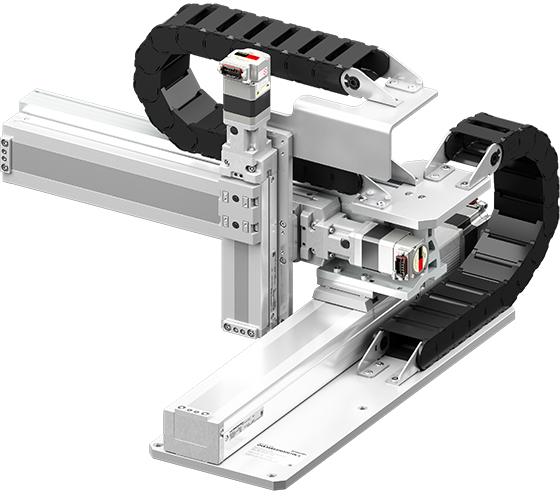
ロボット組み立て作業が不要で、装置立ち上げの時間が短縮
小型ロボット OVR 3軸直交ロボットは、可動範囲300 mm × 300 mm × 100 mm、可搬質量2.5 ㎏で、小型のワーク移載の自動化にちょうどいいサイズです。電動スライダ3軸を組み立てた状態で納品されるため組立工数が不要となり、装置立ち上げの時間が短縮可能です。部品点数が少ないため、部品表作成・発注・受入の手間も削減できます。
パレタイジングシステムへのロボットの導入イメージ


低コストでパレタイジング工程の自動化を導入可能
一般的な産業用ロボットをSIerに委託して導入する合計費用よりも、小型ロボット OVR 3軸直交ロボットは、部品代のみ考慮すればよいため、低コストです。ロボット本体だけでなく、制御に必要な機器やケーブルも合わせてお届けします。
構成価格例
| 品名 | 数量 | 定価 | 小計 | |
|---|---|---|---|---|
| ロボット | OVR3AR030030Z10K-C | 1 | 682,500円 | 682,500円 |
| ロボットコントローラ | MRC01-C | 1 | 100,000円 | 100,000円 |
| ドライバ | AZD-KD | 3 | 47,200円 | 141,600円 |
| モーター・ドライバ間ケーブル(3 m) | CCM030Z1CBF | 1 | 8,700円 | 8,700円 |
| CCM030Z1CVR | 1 | 13,500円 | 13,500円 | |
| CCM030Z1DFR | 1 | 17,600円 | 17,600円 | |
| RS-485通信ケーブル(0.1 m) | CC001-RS4 | 3 | 2,500円 | 7,500円 |
| 合計 971,400円 |
- * 上記以外にエンドエフェクタ、DC電源が必要です。
簡単に制御できるロボットコントローラ
MRC01-Cは、小型ロボットOVR3軸直交ロボットを制御するロボットコントローラであり、初心者でも直感的に設計できることが特徴です。セットアップは、無料でダウンロードできるプログラミングソフトMRC Studioでおこないます。プログラミングソフトMRC Studioで設定した動作プログラムは、PCだけで簡単にティーチングと動作確認をすることが可能です。
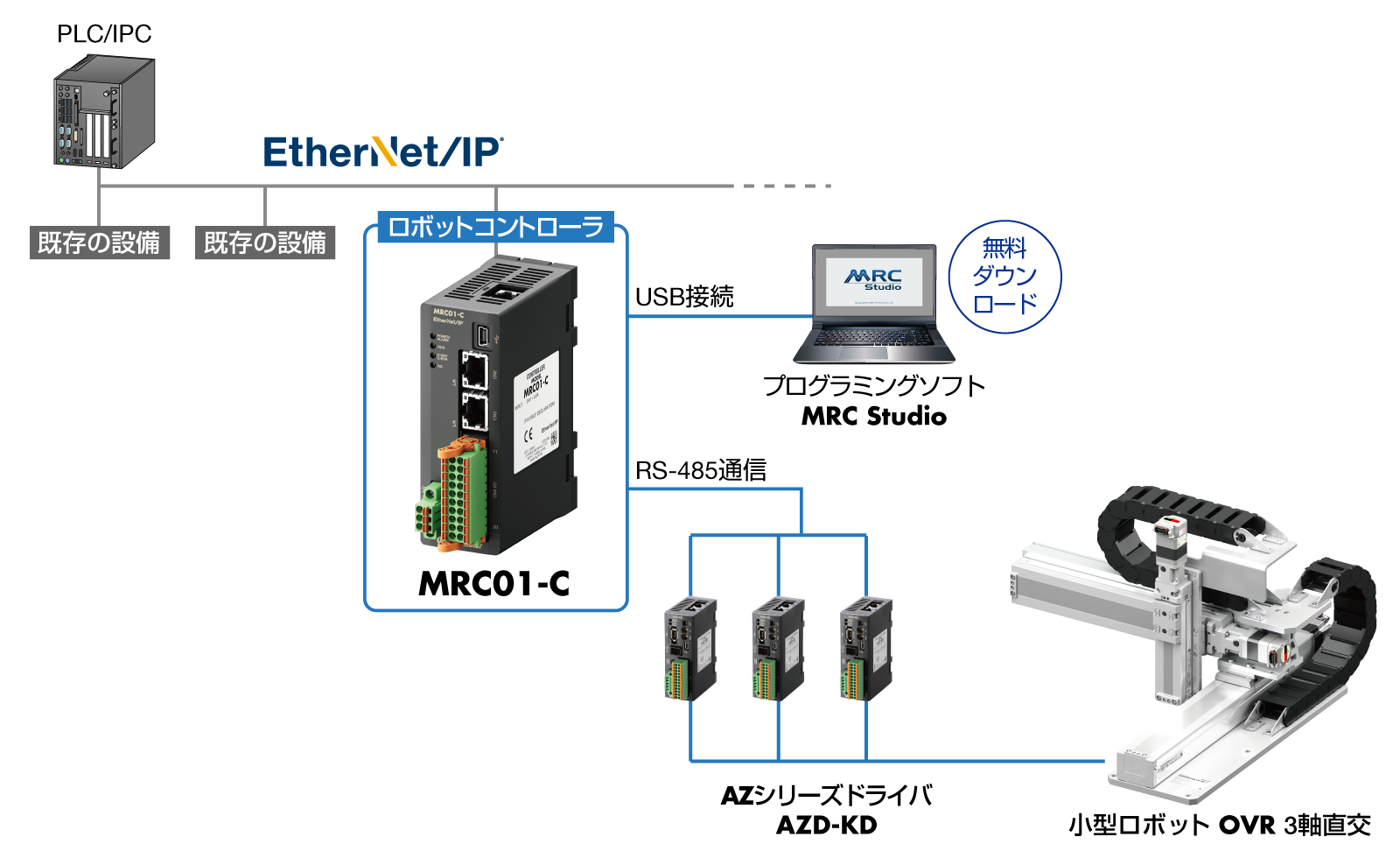
システム構成
MRC01-CとプログラミングソフトMRC Studioを使用することで簡単にロボット制御が可能です。
MRC01-Cに接続できる推奨ドライバは DC 電源入力タイプのドライバ AZD-KD、またはminiドライバAZD-KR2Dです。
2Dビジョンセンサとの連携機能で、さらに高度な作業を自動化
ロボットコントローラ MRC01 は、ビジョンセンサで取得したワークの位置や角度の情報を使って、ロボットを運転させるための便利な機能を搭載しています。
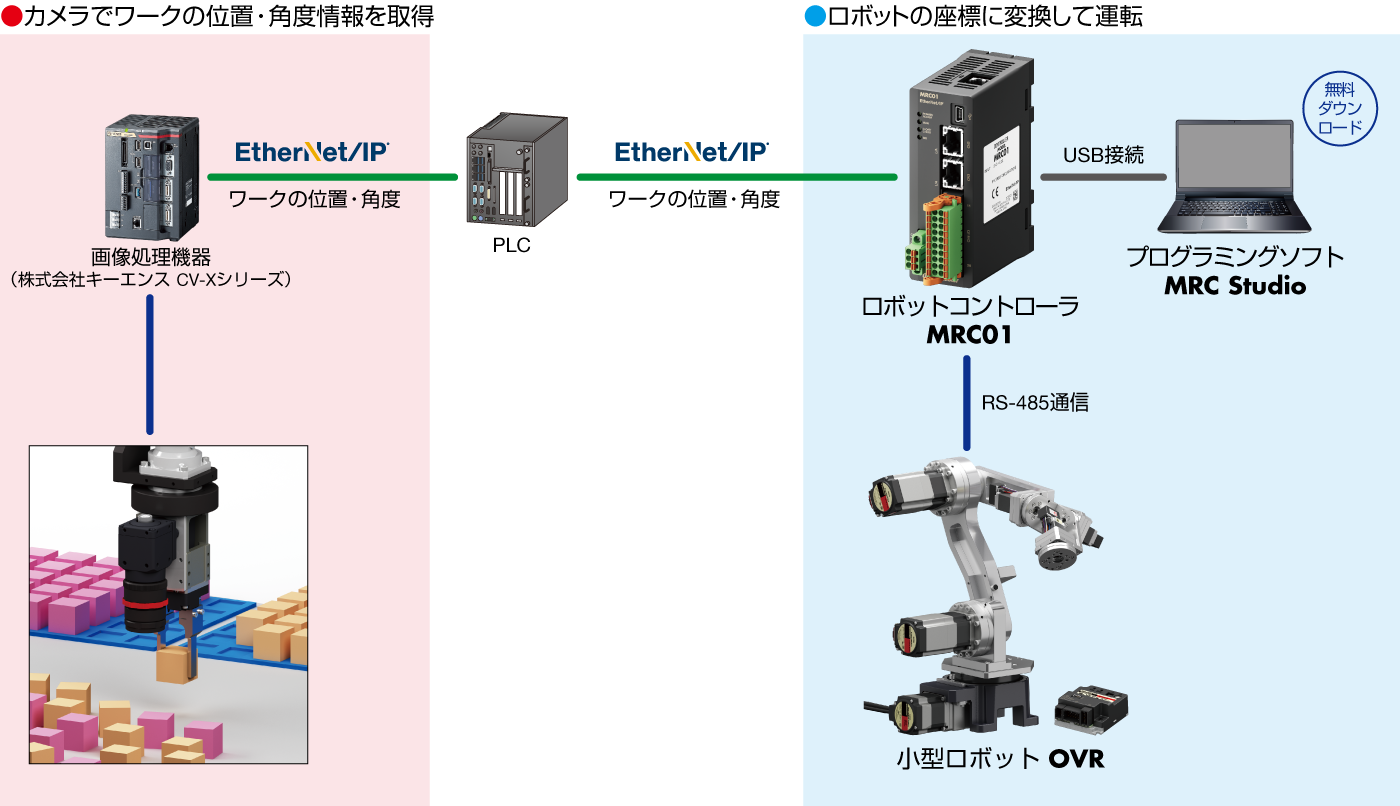
画像処理機器、PLCの対応機種について
上記構成図は、株式会社キーエンス製 CV-X シリーズとの接続例です。他社との接続も可能ですので、お問い合わせください。
キャリブレーションについて
2D カメラと連携するために、MRC Studio を使ってあらかじめキャリブレーションを行います。イラストを見ながら画面の指示に従って操作するだけで簡単に設定ができ、補正工数を削減できます。(カメラは 2 台までキャリブレーションができます。)
パレタイジングシステムにおけるビジョンセンサ情報のロボットコントローラMRC01への取り込みイメージ

安心のセットアップサポート
「小型ロボットOVRと、簡単プログラムができるロボットコントローラMRC01を購入したが、最初はうまく動かせるか不安」というお客様のために、装置に合わせたロボットのプログラムをお客様と一緒に作成し、ビジョンセンサの立ち上げをお手伝いする有償サービスを提供しています。お客様の業務の負担軽減や工数削減に貢献します。
提案製品:小型ロボットOVR 3軸直交ロボット
ロボットコントローラ
- MRC01
- ロボットコントローラユニットMRCUシリーズ
製品に関するお問い合わせのほか、課題のご相談、資料やサンプル提供など、どんなことでもご相談ください。
装置開発に役立つ ステッピングモーター技術解説ハンドブック配布中

量産装置向けにモーターを扱う方へ。トルク特性、振動/発熱対策等の技術解説や、当社製品のラインアップ、特注情報、採用メリットなど専門的な情報を一冊にまとめました。装置の研究開発・設計に役立つ必携資料です。