ステッピングモーター
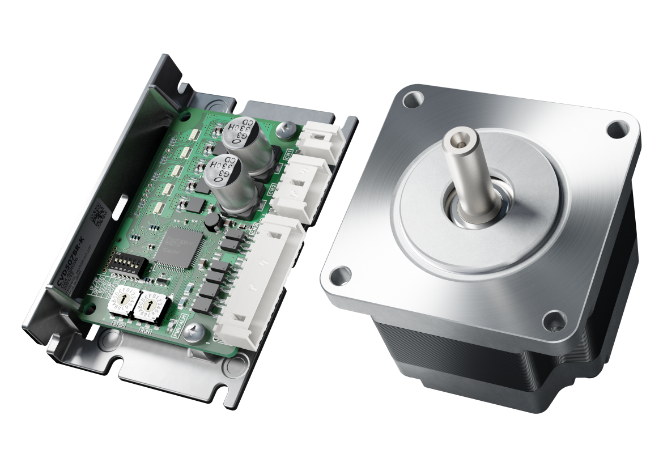
パルス信号に正確に同期し、高精度の位置制御が可能です。 高トルク・低振動で、短い距離の短時間位置決めに適しています。
シリーズが決まっていない方
セレクションガイド詳細へ
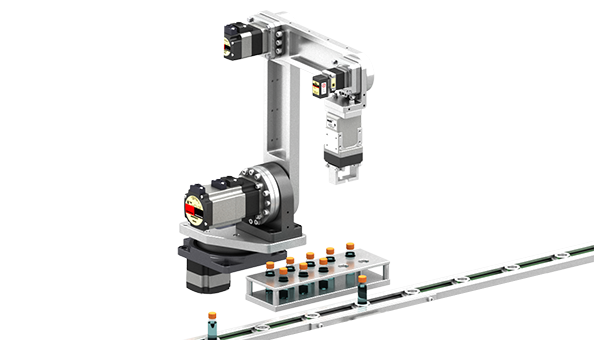
セレクションガイド
お客様の装置に最適な製品シリーズをご案内するセレクションガイドです。装置アプリケーション例を選び、ガイダンスに従い項目を選択することで、製品シリーズを選べます。
さらに詳しく
課題解決事例集詳細へ
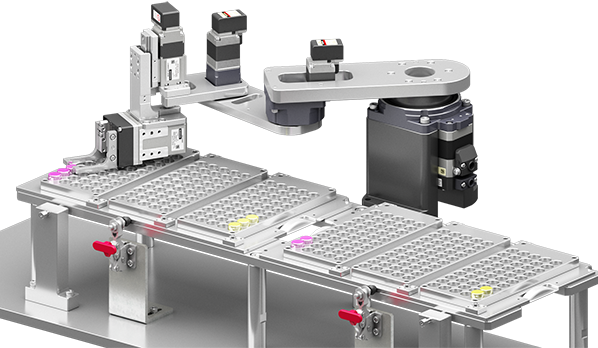
課題解決事例集
お客様の装置課題に対するソリューション情報です。実際の製造現場で使われている装置の内製事例や、従来装置の課題を解決する当社おすすめの製品の活用事例をご紹介しています。
さらに詳しく
関連情報
ロータリーエンコーダ詳細へ
ロータリーエンコーダ
- 小型・薄型・軽量のインクリメンタル形エンコーダ
- 100~4000P/R(14種類)の分解能
- ラインドライバ出力、電圧出力、オープンコレクタ出力
- 機械原点とZ相信号の位置合わせが簡単
さらに詳しく