ブラシレスモーター BXシリーズ
BX460A-15FR

ギヤヘッド/モーター/回路


この製品は現在販売のご案内を終了しています
| 製品種別 | 品名 | 定価 | 出荷日 |
|---|---|---|---|
| ギヤヘッド/モーター/回路 | BX460A-15FR | 80,000円 | 生産終了品(2019年3月31日 生産終了) |
付属品
- モーター、ギヤヘッド、回路、外部速度設定器 (信号線付)、回路用取付金具 (ねじ付)、取付用ねじ、平行キー、安全カバー (ねじ付)、取扱説明書
仕様
特性

回転速度-トルク特性
外形図
モーター/ギヤヘッド
回路
外部速度設定器
データダウンロード
その他仕様
共通仕様
| 項目 | 仕様 |
|---|---|
| 入力信号※ | フォトカプラ入力方式 入力抵抗2.3kΩ 内部電源電圧+15V CW入力、CCW入力、速度データ選択入力、モーター制御解除(FREE)入力、ブレーキ入力(アラーム出力時:アラームリセット入力) |
| 出力信号※ | オープンコレクタ出力 DC4.5~26.4V アラーム出力、ビジー出力(アラーム出力時:アラームパルス出力):40mA以下 スピード出力 ASG、BSG:20mA 以下 |
| 保護機能 | 次の保護機能が動作したときにモーターが自然停止し(電磁ブレーキ付モーターは制動がかかります)、アラーム出力をOFFにします。 ドライバのアラームLEDを( )内の回数点滅(アラームパルスを出力)します。
|
| 最大延長距離 | モーター・ドライバ間 20.4m(オプション 接続ケーブル使用時) |
| 時間定格 | 連続 |
- ※ 入力信号、出力信号は基本モデルとシステムアップ時または、システムアップ時の速度制御モードと位置制御モードで使用できる信号が異なります。
一般仕様
| 項目 | モーター部 | ドライバ部 | |
|---|---|---|---|
| 絶縁抵抗 | 常温常湿において連続運転後、コイルとケース間をDC500Vメガーで測定した値が100MΩ以上あります。(エンコーダを除く) | 常温常湿において連続運転後、電源端子とケース間、電源端子と入出力信号端子間をDC500Vメガーで測定した値が100MΩ以上あります。 | |
| 絶縁耐圧 | 常温常湿において連続運転後、コイルとケース間に50Hz、AC1.5kVを1分間印加しても異常を認めません。(エンコーダを除く) | 常温常湿において連続運転後、電源端子とケース間に50Hz、AC1.5kV、電源端子と入出力信号端子間に50Hz、AC1.8kVを1分間印加しても異常を認めません。 | |
| 温度上昇 | 常温常湿において定格連続運転後、熱電対法でコイルの温度上昇を測定した値が50℃以下、ケース表面の温度上昇を測定した値が40℃以下※1です。 | 常温常湿において定格連続運転後、熱電対法で放熱板の温度上昇を測定した値が50℃以下です。 | |
| 使用環境 | 周囲温度 | 0~+50℃(凍結のないこと) | |
| 周囲湿度 | 85%以下(結露のないこと) | ||
| 標高 | 海抜1000m以下 | ||
| 雰囲気 | 腐食性ガス、塵埃のないこと、放射性物質、磁場、真空などの特殊環境での使用は不可 | ||
| 振動 | 連続的な振動や過度の衝撃が加わらないことJIS C 60068-2-6正弦波振動試験方法に準拠 周波数範囲:10~55Hz、片振幅:0.15mm 掃引方向:3方向(X、Y、Z) 掃引回数:20回 |
||
| 保存環境※2 | 周囲温度 | −20~+60℃(凍結のないこと) | −25~+70℃(凍結のないこと) |
| 周囲湿度 | 85%以下(結露のないこと) | ||
| 標高 | 海抜3000m以下 | ||
| 耐熱クラス | UL/CSA規格:105(A)、EN規格:120(E) | − | |
| 保護等級 | IP54(丸シャフトタイプの取付面、コネクタ部を除く) | IP10 | |
- ※1
- 丸シャフトタイプは、モーターケース表面温度が90℃以下になるように、以下のサイズの放熱板(材質:アルミニウム)に取り付けてください。
30Wタイプ:115×115mm 厚さ5mm、60Wタイプ:135×135mm 厚さ5mm、120Wタイプ:165×165mm 厚さ5mm
200Wタイプ:200×200mm 厚さ5mm、400Wタイプ:250×250mm 厚さ6mm - ※2
- 保存環境は、輸送中を含めた短期間の値です。
ご注意
- モーターとドライバを接続した状態では、絶縁抵抗測定、耐圧試験をおこなわないでください。
速度制御仕様
- 基本モデル:モーター、ドライバの基本ユニットで使用したときに適用される仕様です。
- システムアップ時:別売りのシステムアップツール(OPX-1AまたはMEXE01)を使用したときに適用される仕様です。
| 項目 | 基本モデル | システムアップ時 |
|---|---|---|
| 速度制御範囲 | 30~3000r/min(アナログ設定時) | 30~3000r/min(アナログ設定時) 3~3000r/min(デジタル設定時1r/min単位で設定) |
| 回転速度設定方法 | 次のいずれか1つによります。
|
次のいずれか1つによります。
|
| 加速時間・減速時間 | 0.1~15秒(3000r/min 無負荷時) 加速時間・減速時間は全速度データに共通 |
次のいずれか1つによります。(3000r/min 無負荷時)
|
| 多段速度設定方法 |
2速:
内部速度設定器による1速と、外部速度設定器(20kΩ、1/4W)または外部直流電圧(DC0~5V)による1速
|
次のいずれか1つによります。
|
許容ラジアル荷重-許容アキシアル荷重
コンビタイプ・平行軸ギヤヘッド
| 品名 | 減速比 | 許容ラジアル荷重 | 許容アキシアル荷重 N |
|
|---|---|---|---|---|
| シャフト先端から 10mm N |
シャフト先端から 20mm N |
|||
| BX230■-□S | 5 | 100 | 150 | 40 |
| 10、15、20 | 150 | 200 | ||
| 30、50、100、200 | 200 | 300 | ||
| BX460■-□S | 5 | 200 | 250 | 100 |
| 10、15、20 | 300 | 350 | ||
| 30、50、100、200 | 450 | 550 | ||
| BX5120■-□S | 5 | 300 | 400 | 150 |
| 10、15、20 | 400 | 500 | ||
| 30、50、100、200 | 500 | 650 | ||
| BX6200■-□S BX6400S-□S BX6400SM-□S |
5、10、15、20 | 550 | 800 | 200 |
| 30、50 | 1000 | 1250 | 300 | |
| 100、200 | 1400 | 1700 | 400 | |
コンビタイプ・中空軸フラットギヤヘッド
| 品名 | 減速比 | 許容ラジアル荷重 | 許容アキシアル荷重 N |
|
|---|---|---|---|---|
| ギヤヘッド取付面から 10mm N |
ギヤヘッド取付面から 20mm N |
|||
| BX230■-□FR | 5、10 | 450 | 370 | 200 |
| 15、20、30、50、100、200 | 500 | 400 | ||
| BX460■-□FR | 5、10 | 800 | 660 | 400 |
| 15、20、30、50、100、200 | 1200 | 1000 | ||
| BX5120■-□FR | 5、10 | 900 | 770 | 500 |
| 15、20 | 1300 | 1110 | ||
| 30、50、100、200 | 1500 | 1280 | ||
| BX6200■-□FR BX6400S-□FR BX6400SM-□FR |
5※、10 | 1230 | 1070 | 800 |
| 15、20 | 1680 | 1470 | ||
| 30、50、100 | 2040 | 1780 | ||
- ※ BX6400S-□FR、BX6400SM-□FR のみ。
丸シャフトタイプ
| 品名 | 許容ラジアル荷重 | 許容アキシアル荷重 | |
|---|---|---|---|
| シャフト先端から 10mm N |
シャフト先端から 20mm N |
||
| BX230■-A | 87.2 | 107 | モーター質量の半分以下 |
| BX460■-A | 117 | 137 | |
| BX5120■-A | 156 | 176 | |
| BX6200■-A BX6400S-A BX6400SM-A |
197 | 221 | |
許容ラジアル荷重計算
許容ラジアル荷重の計算式は、機構によって異なります。
負荷軸の片側を軸受ユニットで受けない場合
ラジアル荷重が最も厳しい機構です。負荷軸は段付タイプを推奨します。
F0[N]:
フランジ取付面の位置での許容ラジアル荷重
Lp[mm]:
フランジ取付面からラジアル荷重点までの距離
B[mm]:
フランジ取付面から軸受ユニットまでの距離
| 品名 | 許容ラジアル荷重 W[N] |
|---|---|
| GFS2G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{36}{36 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| GFS4G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{40}{40 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| GFS5G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{50}{50 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| GFS6G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{60}{60 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
負荷軸の片側を軸受ユニットで受ける場合
| 品名 | 許容ラジアル荷重 W[N] |
|---|---|
| GFS2G□FR GFS4G□FR GFS5G□FR GFS6G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{\mathrm{B}}{\mathrm{B} - \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| 品名 | 回転速度 | 減速比 | F0[N] |
|---|---|---|---|
| GFS2G□FR | 3~3000r/min 時 | 5、10 | 570 |
| 15~200 | 630 | ||
| 4000r/min 時 | 5、10 | 520 | |
| 15~200 | 580 | ||
| GFS4G□FR | 3~3000r/min 時 | 5、10 | 1000 |
| 15~200 | 1500 | ||
| 4000r/min 時 | 5、10 | 910 | |
| 15~200 | 1370 | ||
| GFS5G□FR | 3~3000r/min 時 | 5、10 | 1080 |
| 15、20 | 1550 | ||
| 30~200 | 1800 | ||
| 4000r/min 時 | 5、10 | 980 | |
| 15、20 | 1430 | ||
| 30~200 | 1680 | ||
| GFS6G□FR | 3~3000r/min 時 | 5、10 | 1430 |
| 15、20 | 1960 | ||
| 30~100 | 2380 | ||
| 4000r/min 時 | 5、10 | 1320 | |
| 15、20 | 1810 | ||
| 30~100 | 2210 |
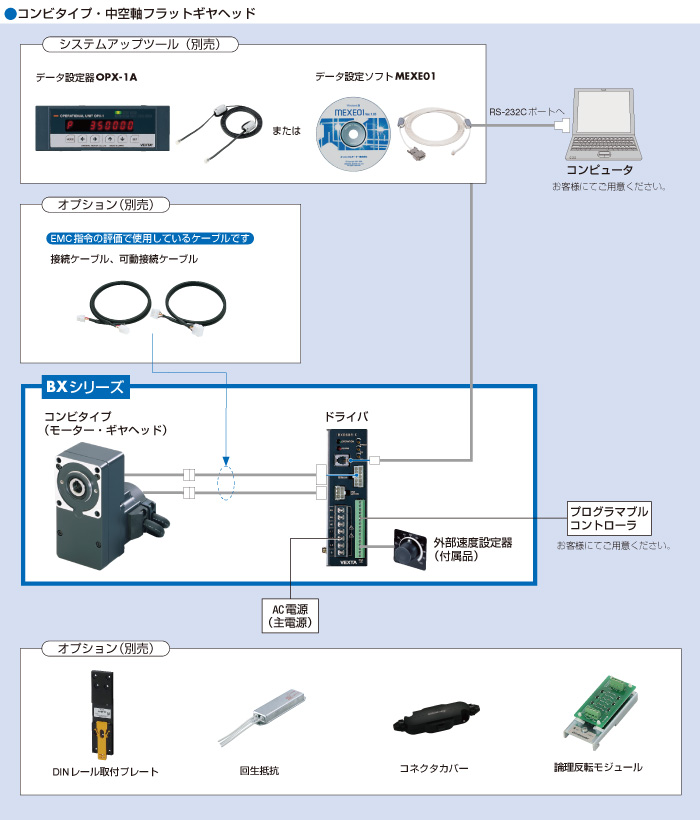
システム構成
ケーブル・周辺機器
品名欄にチェックを入れて「ショップで見積・購入」への追加ができます。
close
close