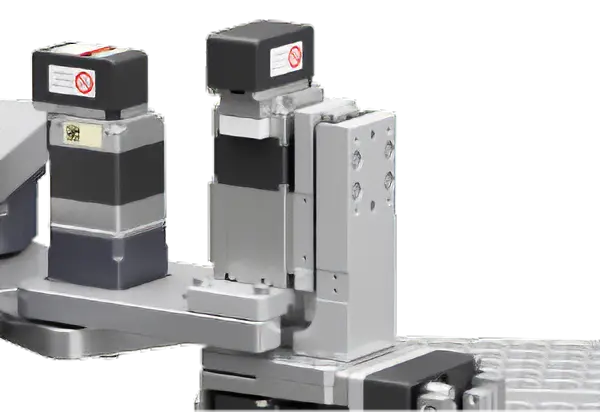
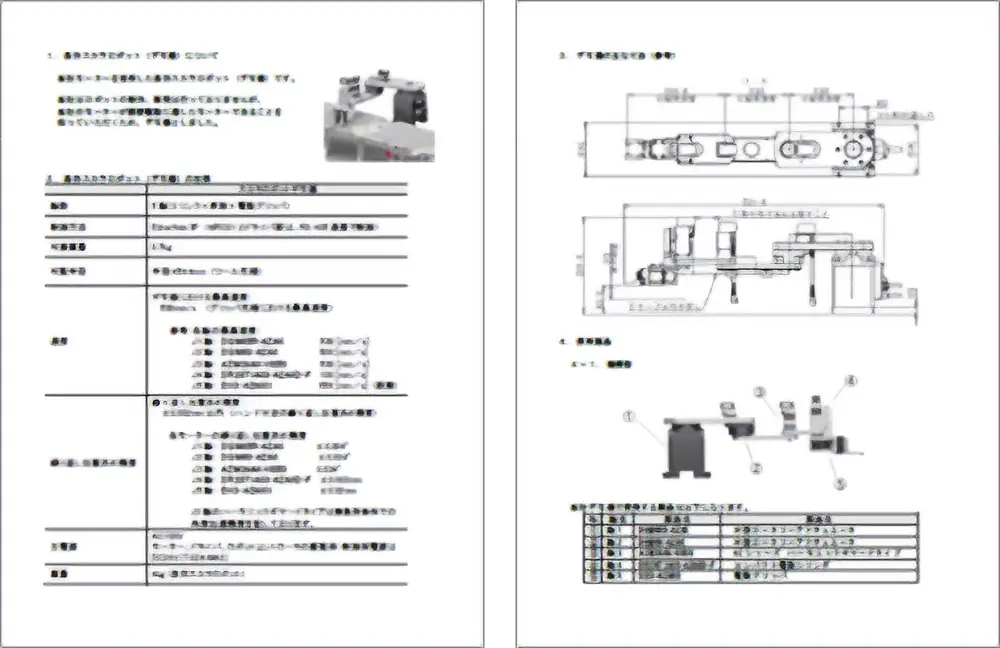
スカラロボット(水平多関節ロボット) 内製事例 ワークのピック&プレイスや工程間搬送を自動化
装置実例 スカラロボット
装置概要
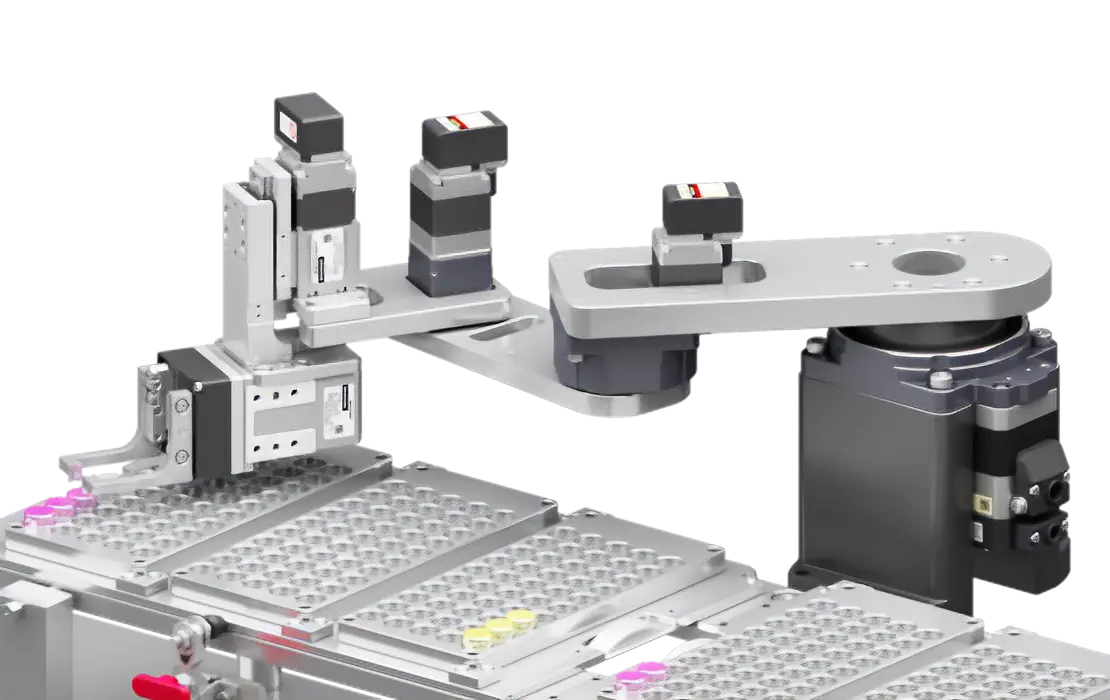
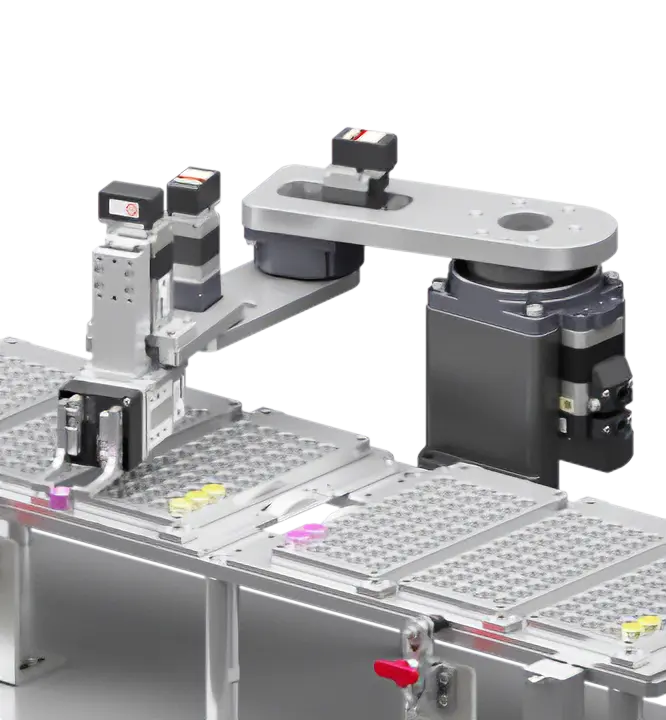
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。
従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。
限られたスペースでピック&プレイスや工程間の搬送を実現させる必要があったため、スカラロボットを内製しました。
| 軸数 | 5軸(3リンク+昇降+電動グリッパ) | |
|---|---|---|
| ロボット制御 | ロボットコントローラ MRC01 | |
| 可搬質量 | 0.7kg | |
| 最高速度 | 500mm/s
(グリッパ先端における最高速度) |
|
| 各軸の最高速度 | 軸1 | 500mm/s |
| 軸2 | 500mm/s | |
| 軸3 | 500mm/s | |
| 軸4 | 40mm/s | |
| 軸5 | 156mm/s(両側) | |
| 装置主電源 | AC100V | |
| 駆動用・制御用電源 | DC24V | |
| 質量(スカラロボット部) | 4kg | |
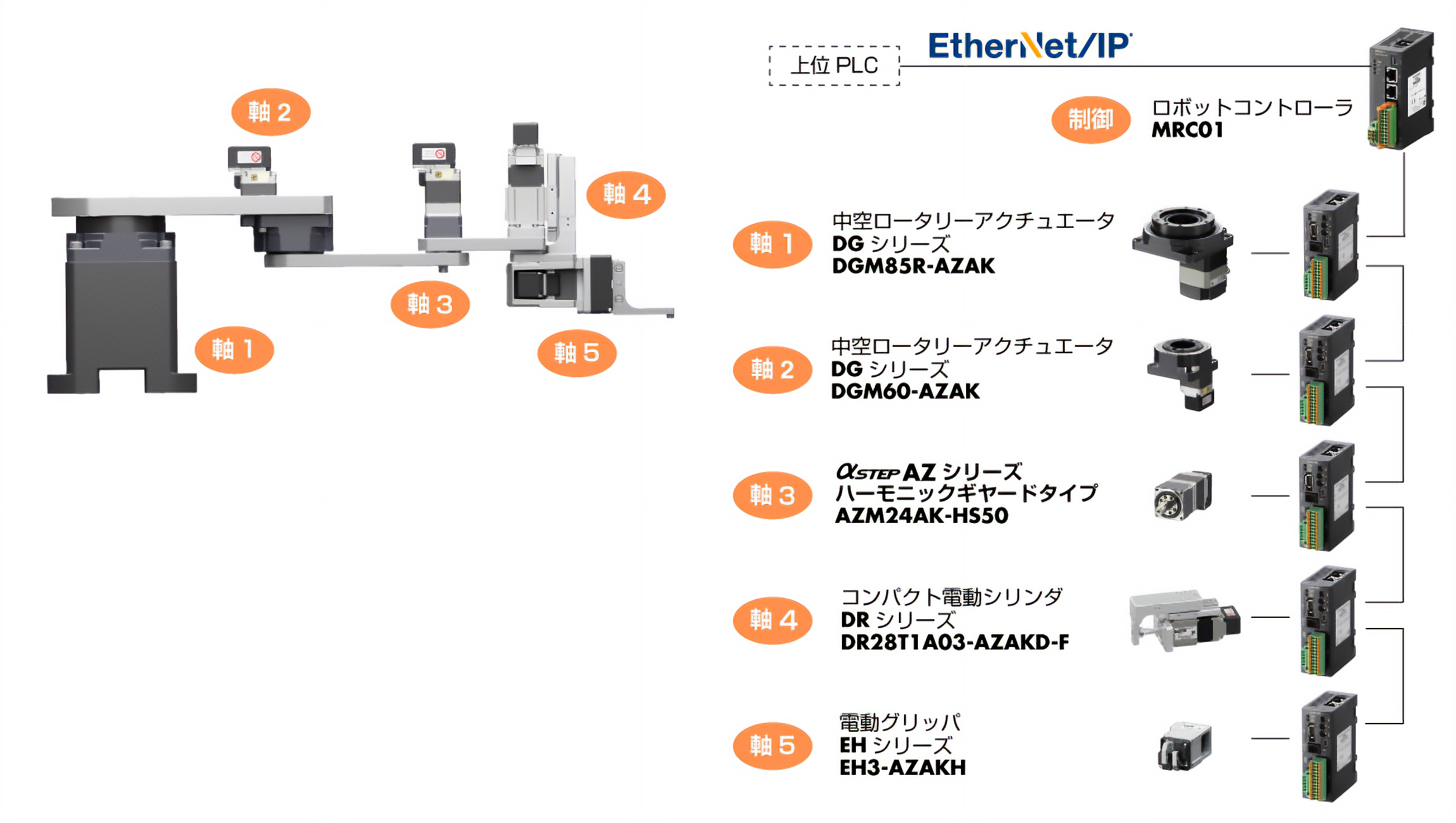
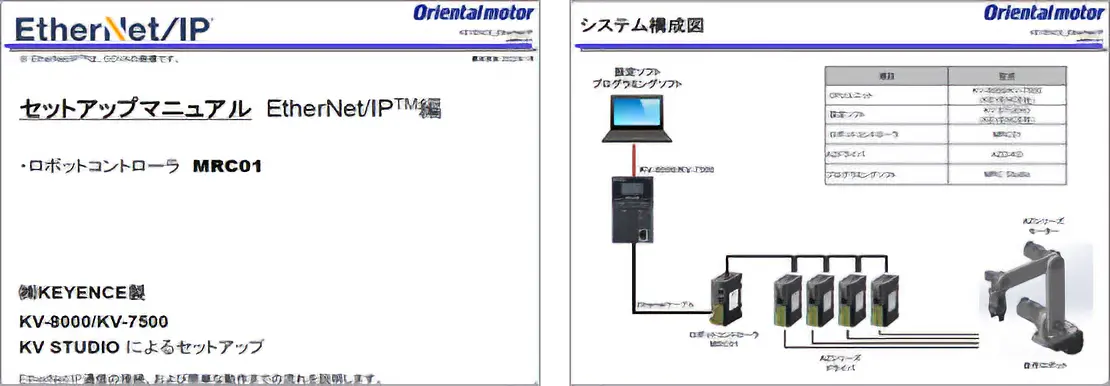
システム構成
Ethernet/IPで制御しています。MRC01とAZシリーズのドライバ間は、RS-485通信で制御しています。
組み立て手順
構成品一覧
| 品名 | 定価 | (WEBショップ価格) | ||
|---|---|---|---|---|
| 軸1 | 中空ロータリーアクチュエータ | DGM85R-AZAK | 187,600円 | (168,840円) |
|
|
ドライバ (位置決め機能内蔵タイプ) |
AZD-KD | 47,200円 | (42,480円) |
| 可動接続ケーブル | CC030VZR2 | 11,200円 | (10,080円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| RS-485通信用ケーブル | CC001-RS4 | 2,500円 | (2,250円) | |
| 軸2 | 中空ロータリーアクチュエータ | DGM60-AZAK | 104,700円 | (94,230円) |
|
|
ドライバ (位置決め機能内蔵タイプ) |
AZD-KD | 47,200円 | (42,480円) |
| 可動接続ケーブル | CC030VZ2R2 | 11,200円 | (10,080円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| RS-485通信用ケーブル | CC001-RS4 | 2,500円 | (2,250円) | |
| 軸3 | αSTEP ハーモニックギヤードタイプ | AZM24AK-HS50 | 92,300円 | (83,070円) |
|
|
ドライバ (位置決め機能内蔵タイプ) |
AZD-KD | 47,200円 | (42,480円) |
| 可動接続ケーブル | CC030VZ2R2 | 11,200円 | (10,080円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| RS-485通信用ケーブル | CC001-RS4 | 2,500円 | (2,250円) | |
| 軸4 | コンパクト電動シリンダ | DR28T1A03-AZAKD-F | 129,700円 | (116,730円) |
|
|
ドライバ (位置決め機能内蔵タイプ) |
AZD-KD | 47,200円 | (42,480円) |
| 可動接続ケーブル | CC030VZ2R2 | 11,200円 | (10,080円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| RS-485通信用ケーブル | CC001-RS4 | 2,500円 | (2,250円) | |
| 軸5 | 電動グリッパ | EH3-AZAKH | 79,900円 | (71,910円) |
|
|
ドライバ (位置決め機能内蔵タイプ) |
AZD-KD | 47,200円 | (42,480円) |
| 可動接続ケーブル | CC030VZ2R2 | 11,200円 | (10,080円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| 制御 | ロボットコントローラ | MRC01 | 220,000円 | (198,000円) |

|
DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) |
| RS-485通信用ケーブル | CC001-RS4 | 2,500円 | (2,250円) | |
| 1,126,200円 | (1,013,580円) | |||






- モーターケーブルの長さは全て3mです。
- DC電源ケーブルの長さは全て1mです。
- RS-485通信用ケーブルの長さは全て0.1mです。
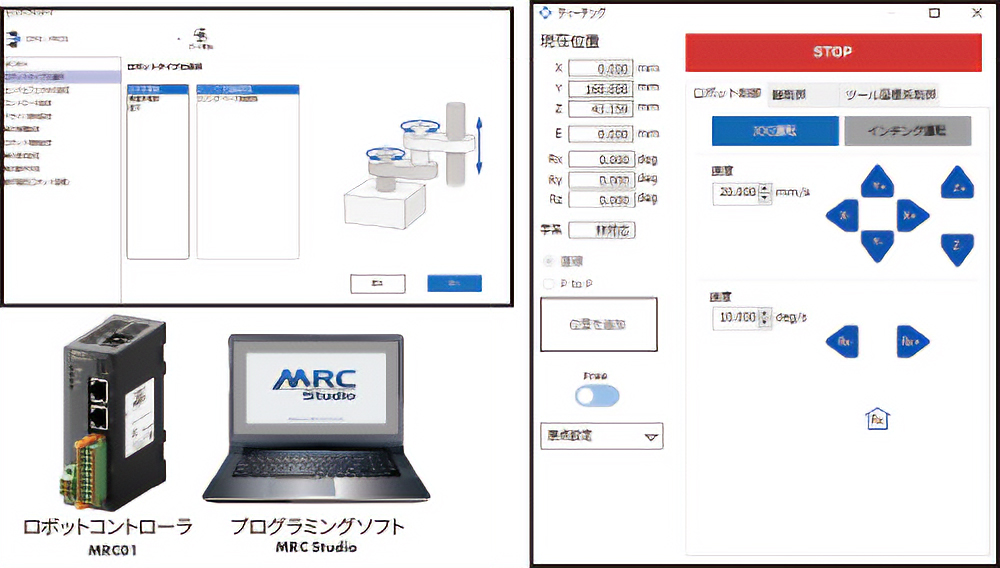
制御部(ロボットコントローラ)
制御部
MRC01

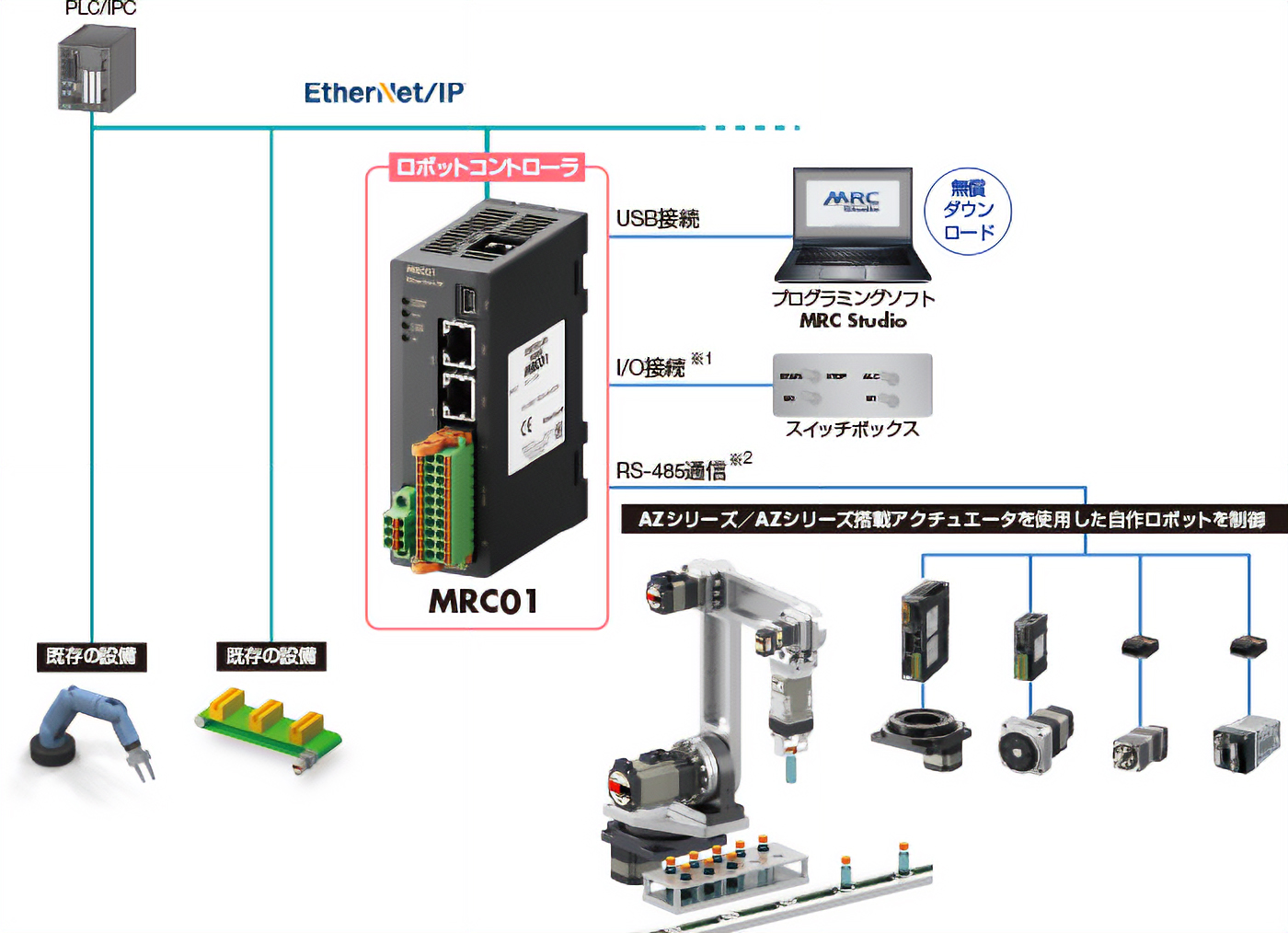
ロボットコントローラ MRC01
既存のシステムに、内製ロボットをかんたん導入
MRC01と上位システムとの連携は、EtherNet/IPTMでダイレクト制御。既存の設備の制御システムを大きく変更せずに、内製ロボットをかんたんに追加導入できます。
- EtherNet/IP™はODVAの商標です。
- ※1
- MRC01は、I/O接続(上位機器なし)でも動かすことができます。
- ※2
- MRC01とAZシリーズのドライバ間は、RS-485通信で制御しています。
初めてでも、かんたん設定
MRC01はプログラミング言語などの専門知識がなくても、初期設定から運転プログラムまで、かんたんに設定できます。ロボットタイプの選択や機構情報の入力などの初期設定はウィザード形式でかんたん。運転プログラムもティーチング操作で内製ロボットを動かしながら、目標としたコマンドを追加していくことができます。
実際に当社の若手設備設計者が初めて使用した際も、複数軸の設定を1つのコマンドで行うことが可能なので、2時間ほどでティーチングによるプログラミングが作成できました。
- プログラミングソフト MRC Studio、EDSファイルはこちらよりダウンロードできます。
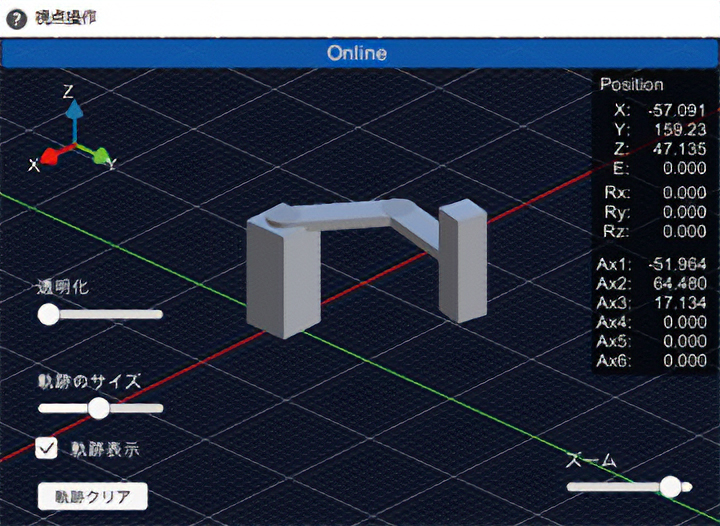
オンライン3Dシミュレーションで動作確認が可能
内製ロボットの運転プログラムを、モーターを駆動させずに、3Dシミュレーター上で確認することが可能です。
シミュレーションを行うのに、上位PLCとの接続は不要です。
「逆方向へ動いてしまう」「動かしすぎてロボットを破損させてしまう」 といったことを未然に防ぐことができます。
- オフラインでは使用できません。
エンドエフェクタ軸の制御も可能
産業用ロボットの代表的な構造である、垂直多関節ロボット、スカラロボット、直交ロボットに対応しています。
エンドエフェクタ軸もMRC01で制御でき、システム全体の省スペース、省配線、コストダウンに貢献します。
-
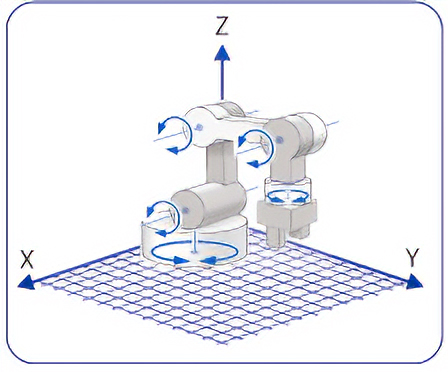
垂直多関節ロボット -
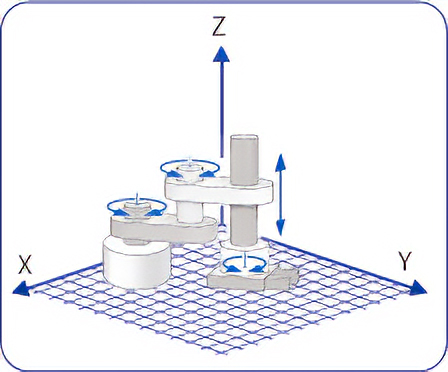
スカラロボット -
直交ロボット
- 対応するロボットの詳細は、取扱説明書をご覧ください。
豊富なラインアップに対応
AZシリーズと、それらを搭載している電動アクチュエータに対応しています。製品ラインアップも豊富なため、内製したいロボットタイプに合わせた自由度の高いロボット設計に貢献します。
AZシリーズドライバ
位置決め機能内蔵タイプ
-

単相100-120V、
単相/三相200-240V -

DC24/48V
mini ドライバRS-485 通信タイプ

AZシリーズモーター、AZシリーズ搭載電動アクチュエータ
-

モーター -

中空ロータリーアクチュエータ
DGⅡシリーズ -

コンパクト電動シリンダ
DRシリーズ
DRS2シリーズ
-

電動スライダ
EZSシリーズ
EASシリーズ
EZSHシリーズ -

電動シリンダ
EACシリーズ -

ラック・ピニオンシステム
Lシリーズ -

電動グリッパ
EHシリーズ
搭載製品

ロボットコントローラ MRC01
「初期設定」「動作プログラミング」「動作確認」の3ステップで、内製ロボットをかんたんに導入・制御できるロボットコントローラです。AZシリーズ/AZシリーズ搭載 電動アクチュエータと接続することができます。
関節軸、エンドエフェクタ
関節軸、エンドエフェクタ
AZシリーズ搭載製品

αSTEP AZシリーズ搭載製品
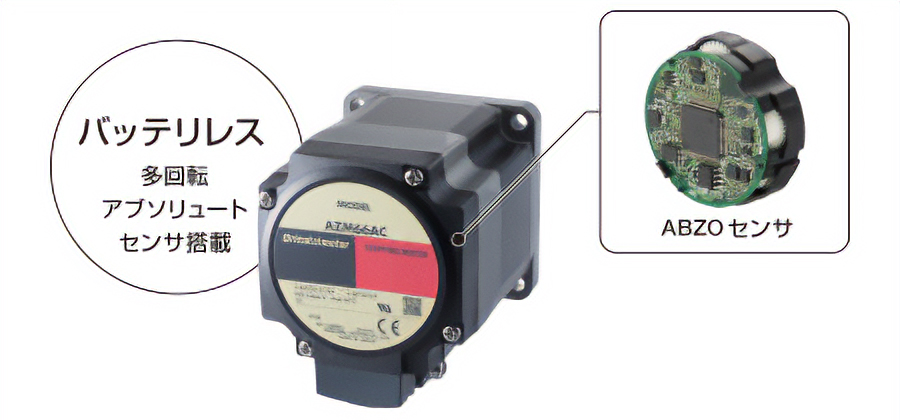
機械式多回転アブソリュートセンサでセンサの削減とバッテリレスを実現
αSTEP AZシリーズなら、原点などの外部センサを削減でき、省配線でコンパクトな構成に貢献します。機械式多回転アブソリュートセンサ〈ABZO〉を採用しているため、位置決め運転中に電源が非常停止や停電によって遮断されていても位置情報を保持します。機械式なのでデータ保持のためのバッテリは不要です。バッテリの購入コストや、運用時のトラブル、メンテナンス時期を気にする必要がありません。また、AZシリーズのモーター自体がセンサの代わりとなり、ロボットの状態を数値でモニタすることができます。
関節軸に最適 中空ロータリーアクチュエータと小型ギヤードタイプ
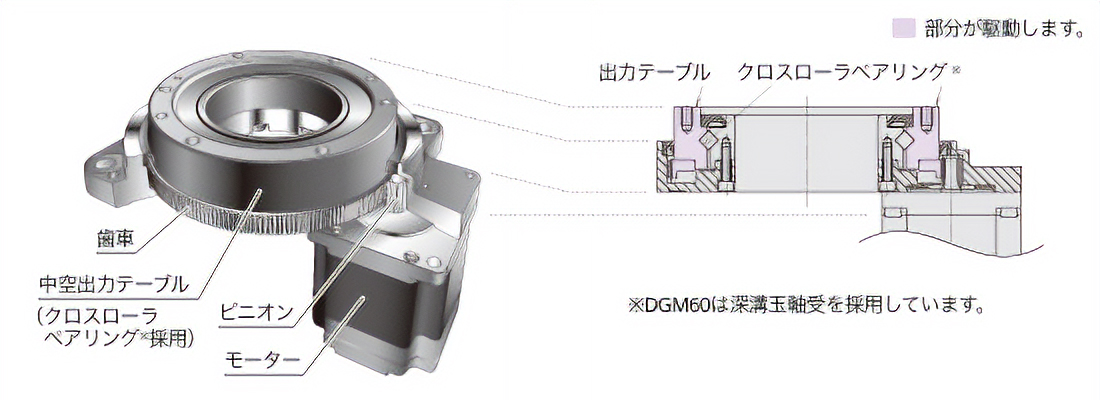
中空ロータリーアクチュエータ DGⅡシリーズ (軸1、軸2)
スカラロボットは軸1から離れたアーム先端のワークをつかむ際、大きな負荷モーメントが発生します。
DGⅡシリーズは中空出力テーブルの軸受にクロスローラーベアリングを採用し、高許容モーメントを実現しました。これによりアームの可動範囲拡大に貢献しています。
また、中空穴(貫通)は引き回しが複雑なケーブルの配線に利用することができ、装置設計の簡略化が図れます。


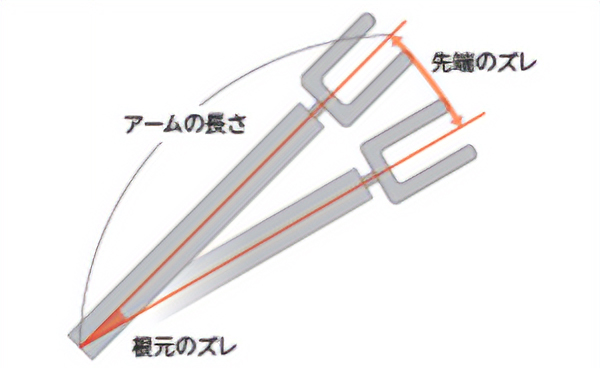
αSTEP AZシリーズ ハーモニックギヤードタイプ (軸3)
小さなズレでも、アーム先端では大きくなり、ワークを正確につかむことができない場合があります。ハーモニックギヤードタイプはノンバックラッシなので、ズレを抑え、正確な動作を実現しています。
ロボット機構先端の負荷を低減する小型・軽量アクチュエータ
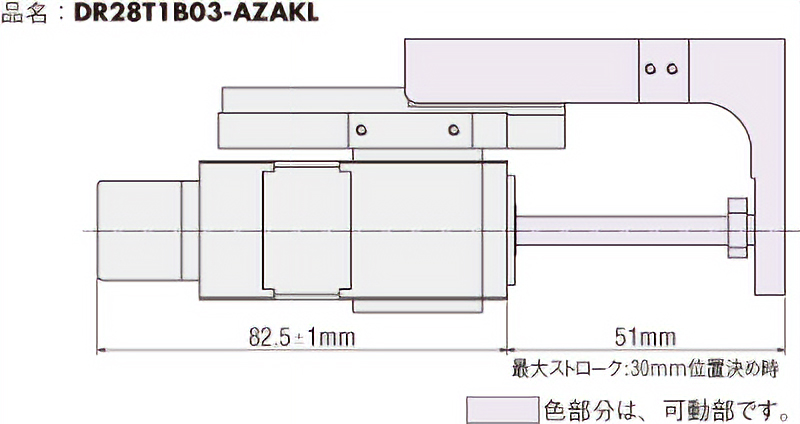
コンパクト電動シリンダ DRシリーズ (軸4)
αSTEP AZシリーズとボールねじを一体化したコンパクトボディで、装置の小型化・省スペース化に貢献することができます。装置先端の軽量化により、設計の自由度の向上が期待できます。
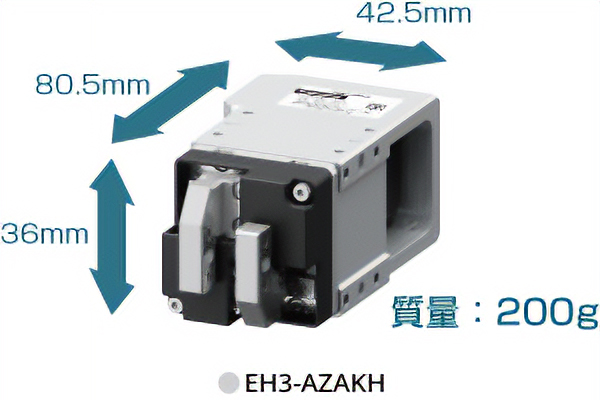
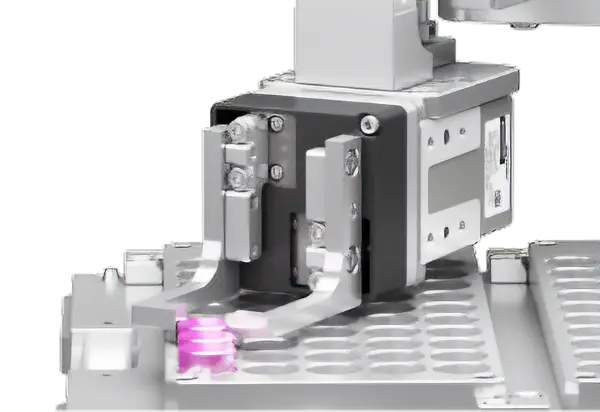
電動グリッパ EHシリーズ (軸5)
エンドエフェクタが小型・軽量になるほど、各関節の負担を軽減でき、ロボット全体の小型化・コストダウンに貢献します。
電動グリッパなら位置・把持時間・把持力を自在に設定可能。さまざまな把持を実現できます。
搭載製品

中空ロータリーアクチュエータ
DGⅡシリーズ
中空ロータリーテーブルとαSTEPの一体型製品です。アクチュエータ内部は減速機構のため、高出力駆動が可能です。

αSTEP バッテリレス アブソリュートセンサ搭載 AZシリーズ
当社独自のクローズドループ制御を採用したαSTEPに、新開発のABZOセンサを搭載。アブソリュートシステムをバッテリ不要で可能にしました。ネットワーク対応ドライバも取り揃えて、先進の位置決めをお求めやすい価格で実現します。

コンパクト電動シリンダ
DRシリーズ
αSTEPとボールねじを一体化。取付角寸法20mm、28mmの小型サイズでの高精度位置決めを実現します。タイプや付加機能の豊富な機構バリエーションをご用意しています。ABZOセンサを搭載し、省スペース・省配線に貢献します。

電動グリッパ EHシリーズ
ラック・ピニオン機構にαSTEP AZシリーズを組み合わせた電動グリッパです。人の指先のようなデリケートな「つかみ」を実現し、自動化・省人化をお手伝いします。
製品選定段階から装置設計をサポート
モーターの選定をサポート
専任スタッフがお客様に代わってモーターを選定します。
選定依頼書をダウンロードし、必要事項を記入の上、お問い合わせフォーム※からご依頼いただくか 、お近くのお客様ご相談センターへFAXでお送りください。
機構の概略図やイメージ図、CADデータなどお手持ちの資料からでも対応します。
- ※ ユーザー登録・ログインが必要です。
-
< 垂直多関節ロボット > -
< スカラロボット > -

< 直交ロボット >
-
装置に関する資料をご用意
装置の仕様や外形寸法に関する資料をご用意しています。同様の装置を検討する際にご活用ください。
-
当社製品とPLCの立ち上げ資料をご用意
PLCとの接続および簡単な動作までの流れを説明したセットアップマニュアルをご用意しています。立ち上げ時間の短縮にご活用ください。
トラブルの際はサービスエンジニアがサポート
モーターに関するさまざまな疑問やトラブルに対し、お客様の現場にサービスエンジニアがお伺いし対応します。
またオンラインサポートもおこなっておりますので、お気軽にご利用ください。
関連コンテンツ

ロボットの内製を幅広くサポート
実際に制作した垂直多関節ロボットデモ機を元に製品選定のポイントと、ロボット内製を検討されている方に向けて関連サービスをご紹介します。

多品種パーツ供給装置
さまざまなサイズのパーツを、パーツフィーダのように1つずつ供給する装置です。指定されたパーツをストッカーからラック・ピニオン機構で切り出し、供給口まで搬送します。

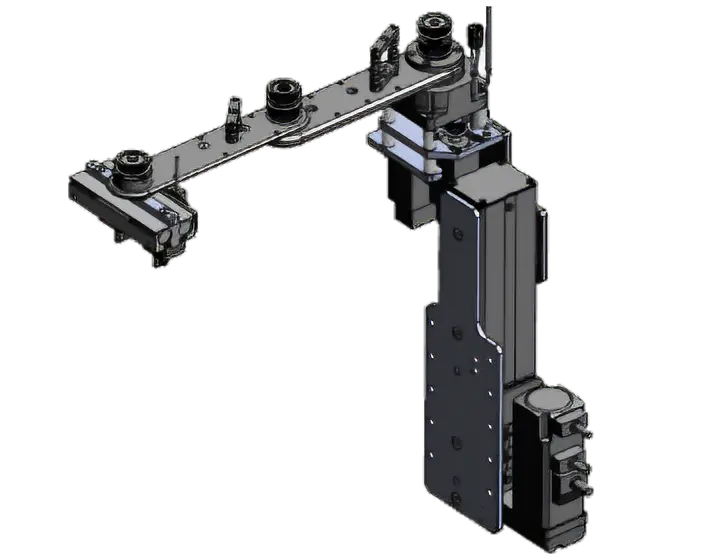
ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。


スカラロボット(水平多関節ロボット)
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。

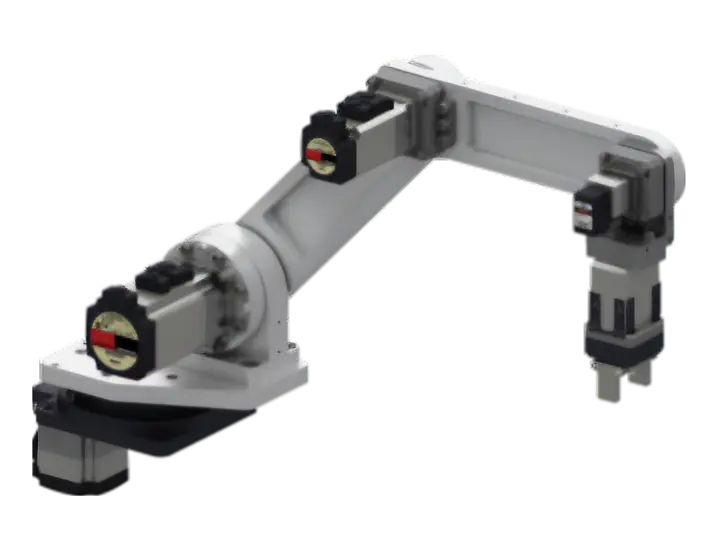
4軸多関節ロボットアーム
AZシリーズを搭載したロボットアームです。平行リンク機構により手首軸を制御することなく先端を水平に保ちます。(オリムベクスタWEBサイトへリンクします。)