ねじ締め自動化ロボット 内製事例
当社生産設備の実例からねじ締め装置を取り上げ、製品の採用ポイントを解説します。
あわせて、装置設計をサポートするためのサービスをご案内します。ご検討の際は、お気軽にご相談ください。
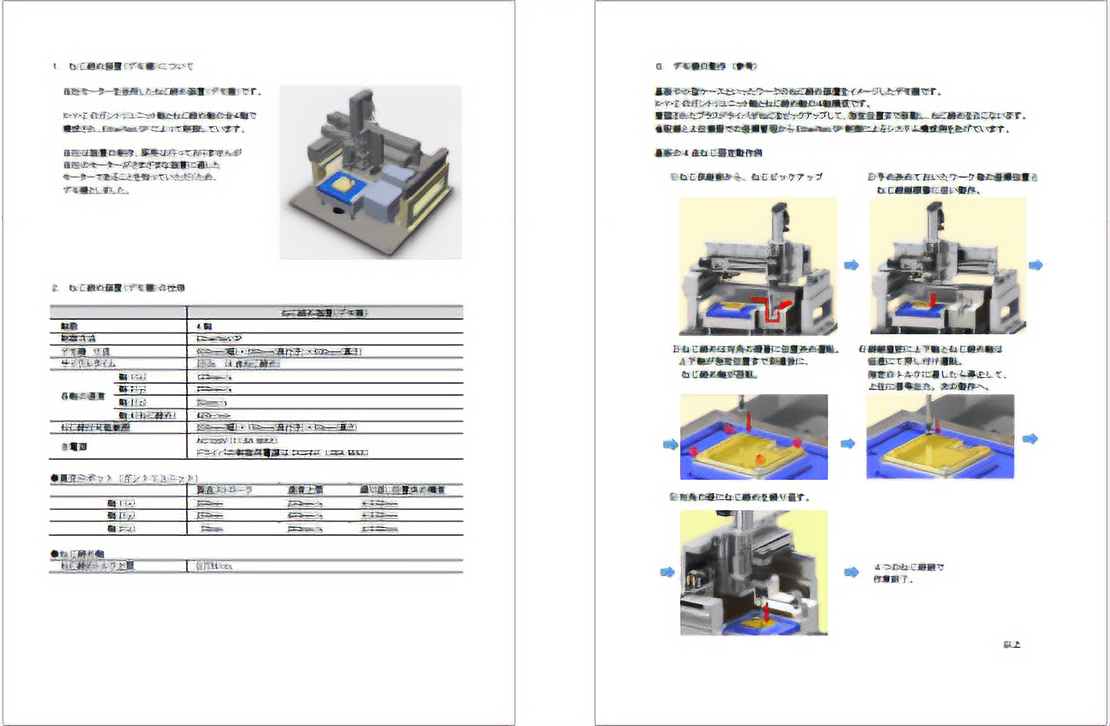
装置実例 ねじ締め装置
装置概要
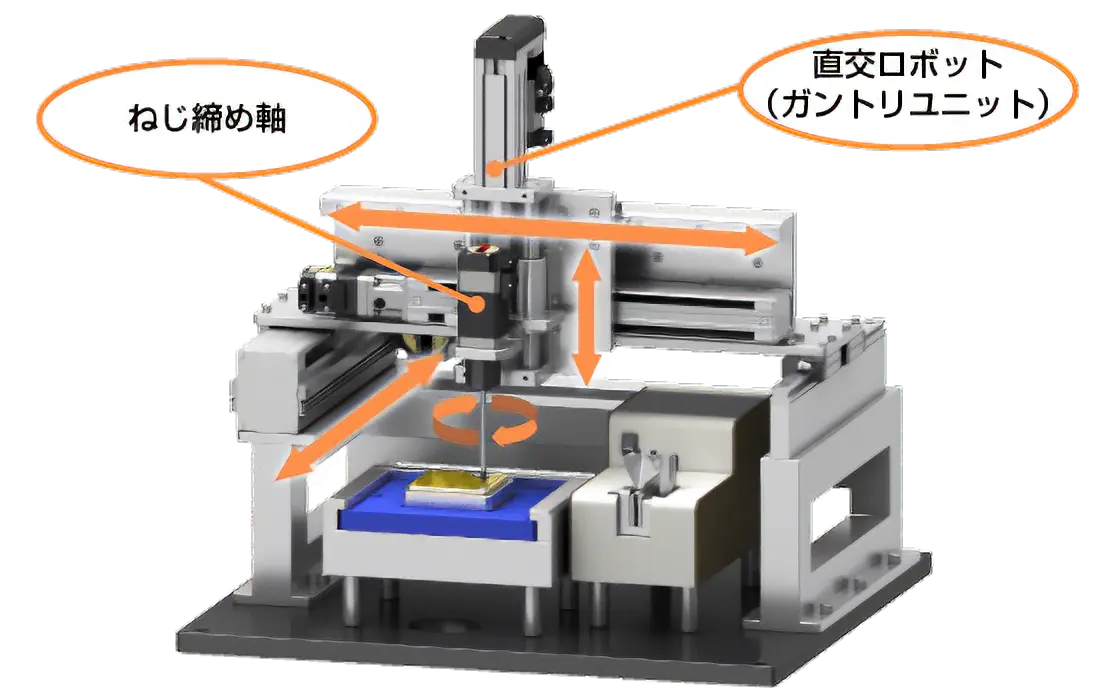
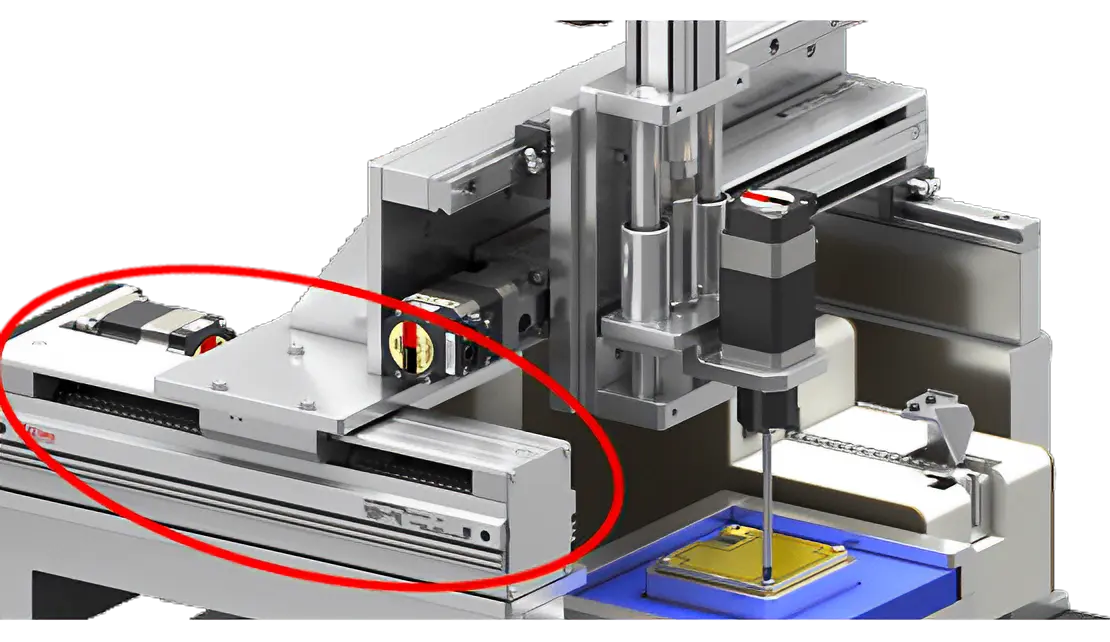
直交ロボット(ガントリユニット)とねじ締め軸で構成された、ねじ締め装置です。
直交ロボット(ガントリユニット)が4箇所のねじの位置に合わせて動き、AZシリーズのモーターで締め付けをおこないます。
この装置により手動で行っていたねじ締めの自動化を実現し、装置サイズのコンパクト化、作業者の負担軽減・作業時間の平準化に貢献しました。
| 軸数 | 4軸 |
|---|---|
| サイクルタイム | 23.0s (4点ねじ締め) |
| ストローク | 軸1(x) 125mm/s |
| 軸2(y) 250mm/s | |
| 軸3(z) 50mm/s | |
| 軸4(ねじ締め) 420r/min | |
| ねじ締付可能範囲 | W200mm×D150mm×H50mm |
| 主電源 | AC100V※ |
※ ドライバの駆動用・制御用電源はDC24Vです。
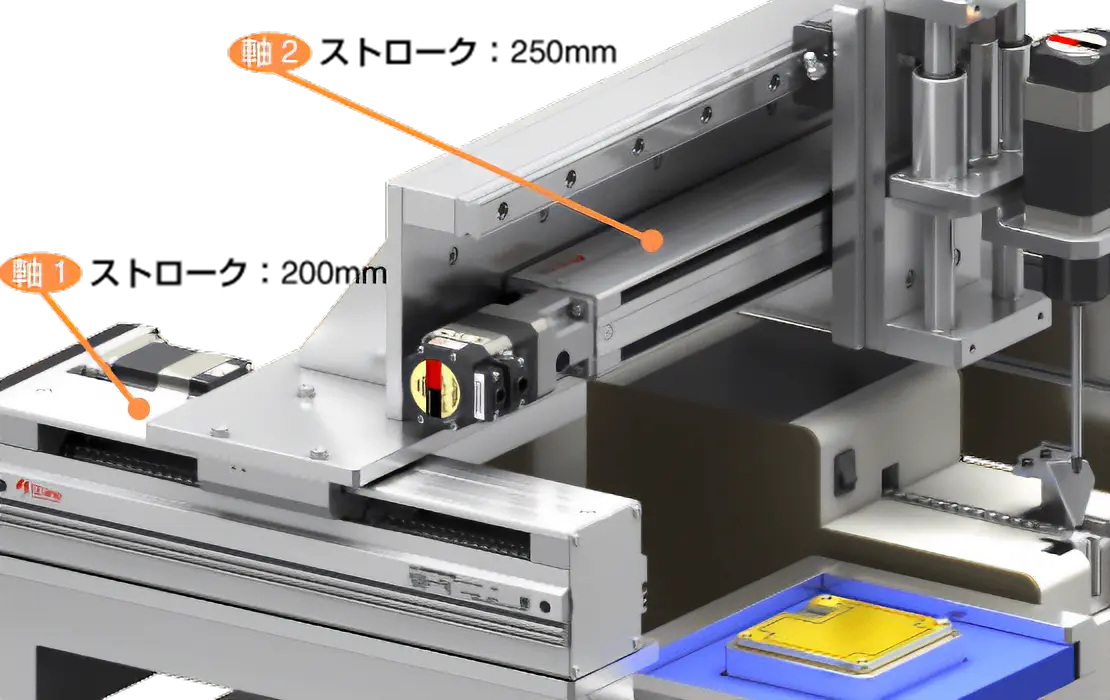
直交ロボット(ガントリユニット)
| 製品のストローク | 速度上限 | 繰り返し位置決め精度 | |
|---|---|---|---|
| 軸1(x) | 200mm | 230mm/s | ±0.02mm |
| 軸2(y) | 250mm | 400mm/s | ±0.02mm |
| 軸3(z) | 50mm | 280mm/s | ±0.02mm |
ねじ締め軸
| ねじ締めトルクの上限 | 0.77N・m |
|---|
社内設備設計者に聞いた:ねじ締め装置における直交ロボット(ガントリユニット)のポイント
必要最低限の設置面積で、ラインの流れを止ないねじ締めの自働化を実現
ねじ締めの自働化にあたって、「市販品だとワークに対して装置のサイズが大きい」「コストをもっと下げたい」といった設計の課題があり、直交ロボット(ガントリユニット)の内製による課題解決を図りました。
【直交ロボット(ガントリユニット)を選択した背景】
- ワークに合ったストロークの電動アクチュエータを使用することで、最低限のスペースでねじ締めを自働化
- 主軸側(XYZ軸)が動くため流れを止めない生産ラインを実現可能
テーブルが移動する門型の特徴[上から見た図]
| 必要設置面積: | 直交ロボット(ガントリユニット)よりも広い ワークサイズに関わらずテーブルの可動域分のスペースが必要 |
|---|---|
| ラインの流れ: | 2工程発生(①コンベヤ→テーブル、②テーブル→コンベヤ) |
![テーブルが移動する門型の特徴[上から見た図]](/sites/default/files/image/solutions/casestudies/in-house-machine/05/in-house-machine-05_02.webp)
直交ロボット(ガントリユニット)の特徴[上から見た図]
| 必要設置面積: | 門型よりも狭い ワークに合ったストロークの電動アクチュエータを使用することで、設置面積の省スペース化が可能 |
|---|---|
| ラインの流れ: | 止まらない |
![直交ロボット(ガントリユニット)の特徴[上から見た図]](/sites/default/files/image/solutions/casestudies/in-house-machine/05/in-house-machine-05_03.webp)
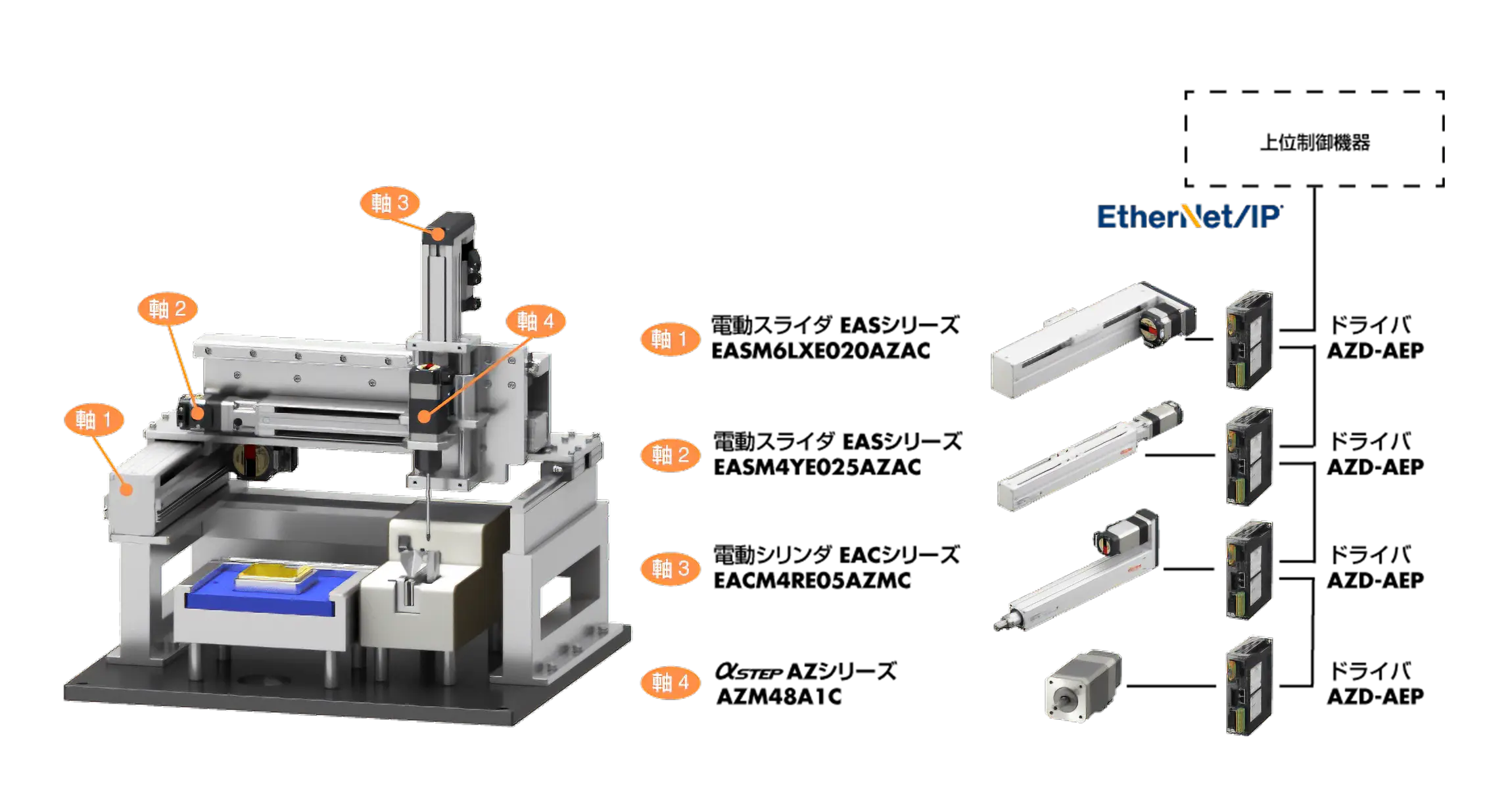
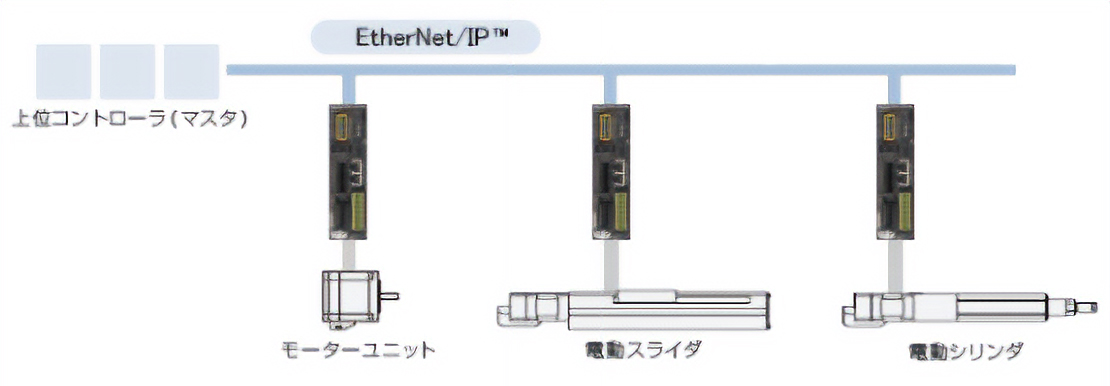
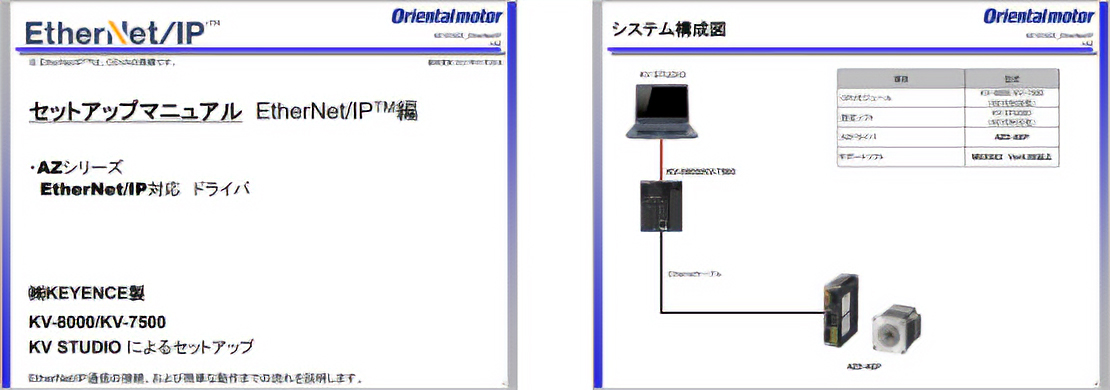
システム構成
各軸をEtherNet/IPで制御しています。
EASM6LXE020AZACは2026年3月生産中止予定です。推奨代替品については生産終了品・代替品検索でご確認ください。
AZシリーズで自作したロボットをかんたんに、
設定・プログラムして動かせるロボットコントローラもご用意しております。

※今回の装置内製事例にMRC01は使用しておりません。
構成品一覧
| 品名 | 定価 | (WEBショップ価格) | ||
|---|---|---|---|---|
| 軸1 | 電動スライダ | EASM6LXE020AZAC | 102,600円 | (92,340円) |


|
EtherNet/IP対応ドライバ | AZD-AEP | 69,000円 | (62,100円) |
| 接続ケーブル | CC050VZF | 11,100円 | (9,990円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| 軸2 | 電動スライダ | EASM4YE025AZAC | 79,400円 | (71,460円) |

|
EtherNet/IP対応ドライバ | AZD-AEP | 69,000円 | (62,100円) |
| 可動接続ケーブル | CC050VZR | 14,300円 | (12,870円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| 軸3 | 電動シリンダ | EACM4RE05AZMC | 76,200円 | (68,580円) |

|
EtherNet/IP対応ドライバ | AZD-AEP | 69,000円 | (62,100円) |
| 可動接続ケーブル | CC050VZRB | 19,400円 | (17,460円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| 軸4 | αSTEP | AZM48A1C | 35,400円 | (31,860円) |

|
EtherNet/IP対応ドライバ | AZD-AEP | 69,000円 | (62,100円) |
| 可動接続ケーブル | CC050VZR | 14,300円 | (12,870円) | |
| DC電源用ケーブル | CC02D010-3 | 1,250円 | (1,120円) | |
| 633,700円 | (570,310円) | |||
- ※ モーターケーブルの長さは全て5mです。
- ※ DC電源用ケーブルの長さは全て3mです。
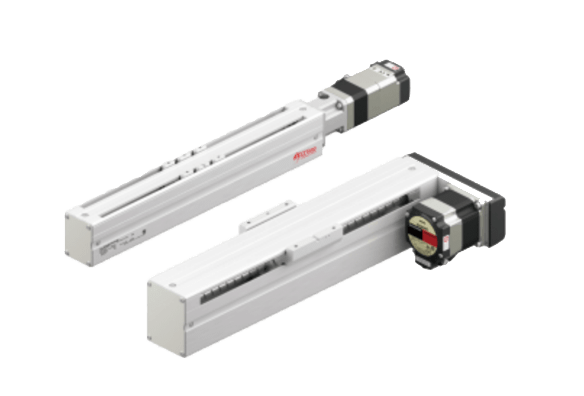
軸1、軸2
電動スライダ EASシリーズ
軸3
電動シリンダ EACシリーズ

軸4
αSTEP AZシリーズ

軸①② 直交ロボット(ガントリユニット[XY軸])
<高許容モーメント> 電動スライダ EASシリーズ
製品不良(ねじのかじり・位置ズレ)を減らす高剛性設計
機構の剛性が低いとねじ締めの反力に耐えられず、機構全体がたわむ恐れがあります。機構全体のたわみは、ねじのかじりや位置ズレなどの不良の原因になります。
剛性の高いEASシリーズは装置のたわみを抑え、製品不良の削減に貢献します。
EAS6の場合
張出し長さが1mの場合でも、押付け力110Nまで許容可能です。
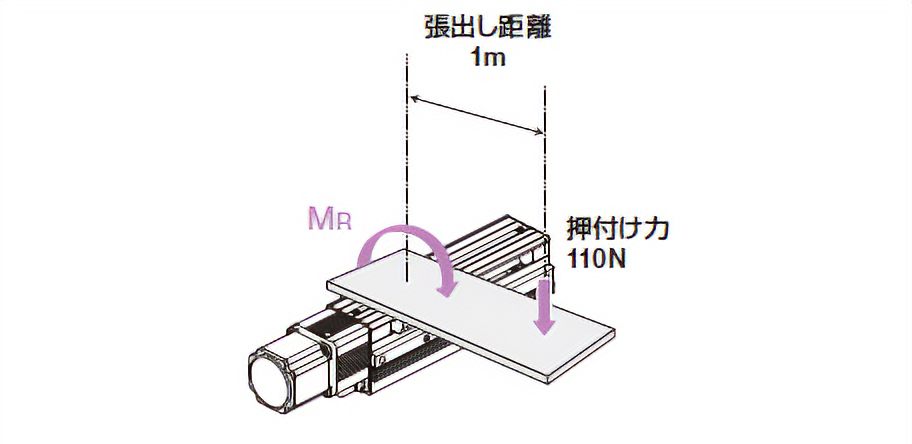
押付け力や荷重は、EAS6の静的許容モーメント110.0N・mから算出した値です。(板の重さは考慮していません。)
許容モーメント値
| 型番 | 静的許容モーメント※1[N・m] | 動的許容モーメント※2[N・m] |
|---|---|---|
| EAS6 | MP:86.0 MY:34.0 MR:110.0 |
MP:31.8 MY:10.3 MR:40.6 |
| EAS4 | MP:58.3 MY:16.0 MR:53.3 |
MP:16.3 MY:4.8 MR:15.0 |
- ※1 停止中にリニアガイドが許容できる負荷モーメント
- ※2 動作中にリニアガイドが許容できる負荷モーメント
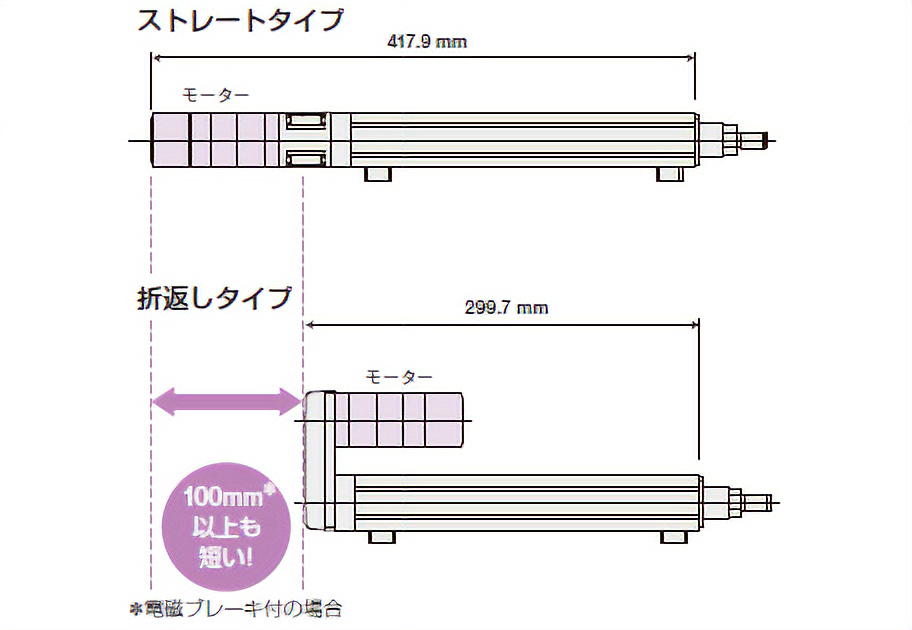
モーター折り返し仕様で装置全体をコンパクトに
スライダの全長が短い折り返しタイプを採用することにより、装置のコンパクト設計を実現しました。これにより、ラインの装置幅の制限に収めることができました。
直交ロボット(ガントリユニット)をX軸側から見た図
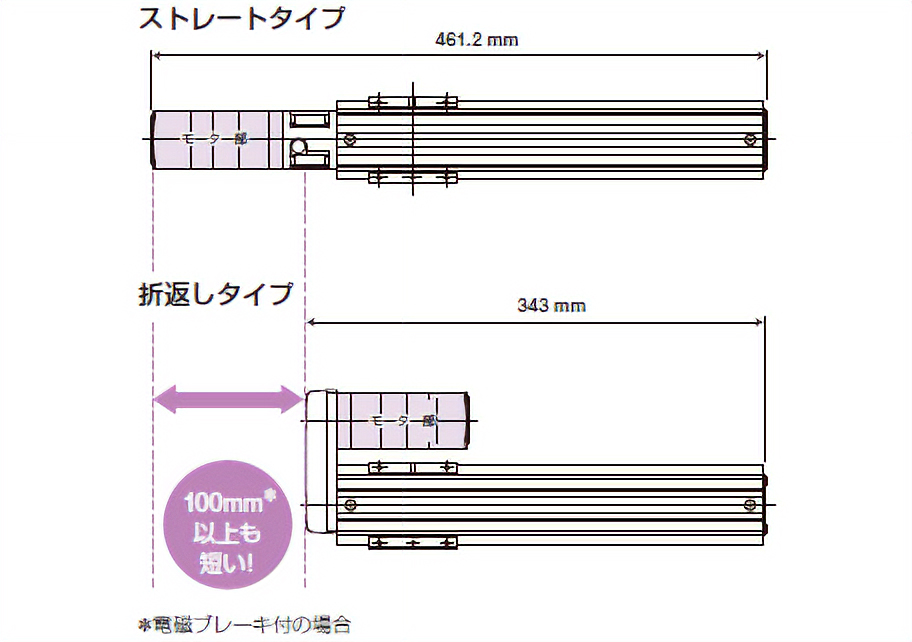
EAS4 電磁ブレーキ付 ストローク 200mmの場合
豊富なストロークで組み合わせ自在
EASシリーズは50mm~850mmまで50mm単位でストロークのラインアップをご用意しています。ワークの大きさに合わせてX軸、Y軸の組み合わせが可能です。
搭載製品

電動スライダ EASシリーズ
モーター部に高効率・省エネルギーなαSTEP ARシリーズ、AZシリーズを搭載。スライダ部はストレートタイプと折返しタイプの2種類をご用意しています。載せて運ぶご用途は、まずEASシリーズからお選びください。
関連製品

電動スライダ EZSシリーズ
<製品不良(ねじのかじり・位置ズレ)の削減に貢献する高剛性設計>
モーター部に高効率・省エネルギーなαSTEP
ARシリーズ、AZシリーズを搭載。スライダ部はストレートタイプと折返しタイプの2種類をご用意。ステンレスシートを採用した簡易防塵構造によって異物の侵入を防止し、発塵も抑制します。
軸③ 直交ロボット(ガントリユニット[Z軸])
電動シリンダ EACシリーズ
Z軸・ねじ締め部の張り出しを軽減
電動シリンダは電動スライダよりも厚みが薄い構造で、張り出しを軽減できます。
また、スライダの全長が短い折り返しタイプを採用することにより、装置のコンパクト設計を実現しました。
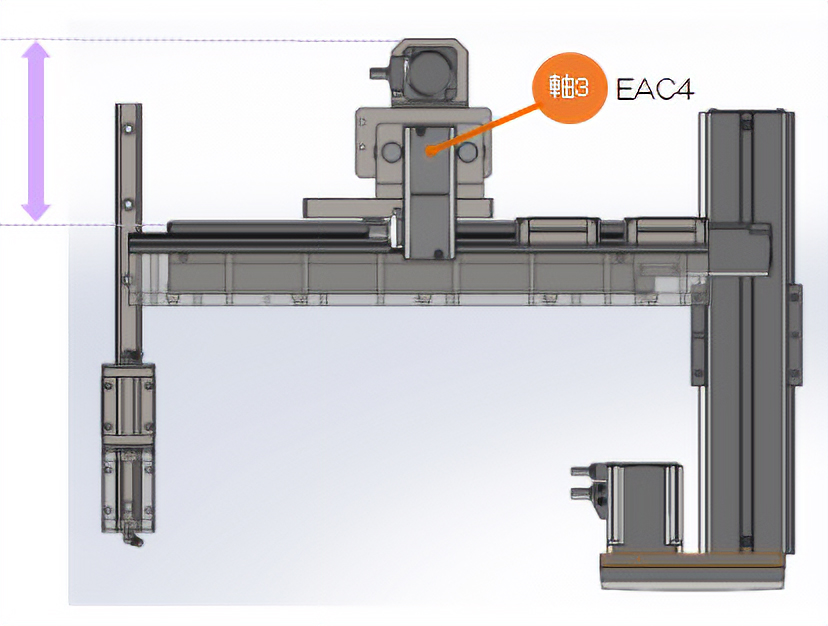
ねじ締め装置を上から見た図
EAC4 電磁ブレーキ付タイプ ストローク 200mmの場合
ねじ締め時に適切な力で押し付け
トルク制限値(トルクリミット)を設定できる押し当て運転機能により、適切な力でねじを押し付けます。押し当て力は、押し当て電流の設定で制限することができます。
最大押し当て力と押し当て電流上限値(参考値)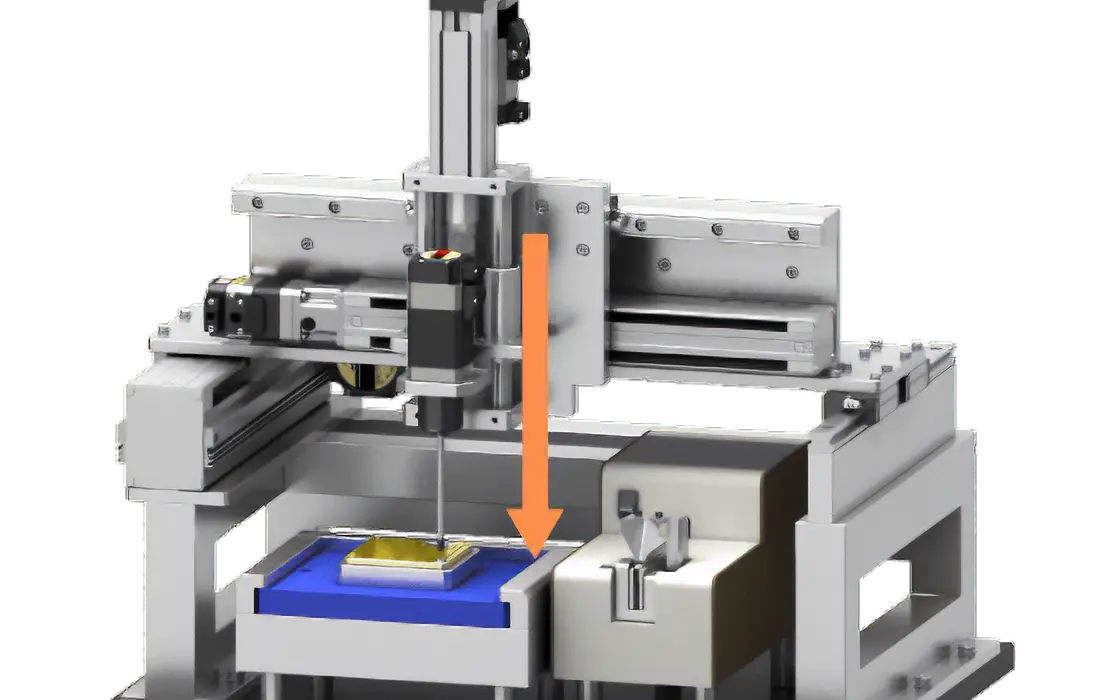
搭載製品

電動シリンダ EACシリーズ
モーター部に高効率・省エネルギーなαSTEP ARシリーズ、AZシリーズを搭載。シリンダ部はストレートタイプと折返しタイプの2種類をご用意しています。押して運ぶご用途は、まずEACシリーズからお選びください。
軸④ ねじ締め軸
αSTEP AZシリーズ
発生トルクを制限し、ねじのかじり・締めすぎを防止
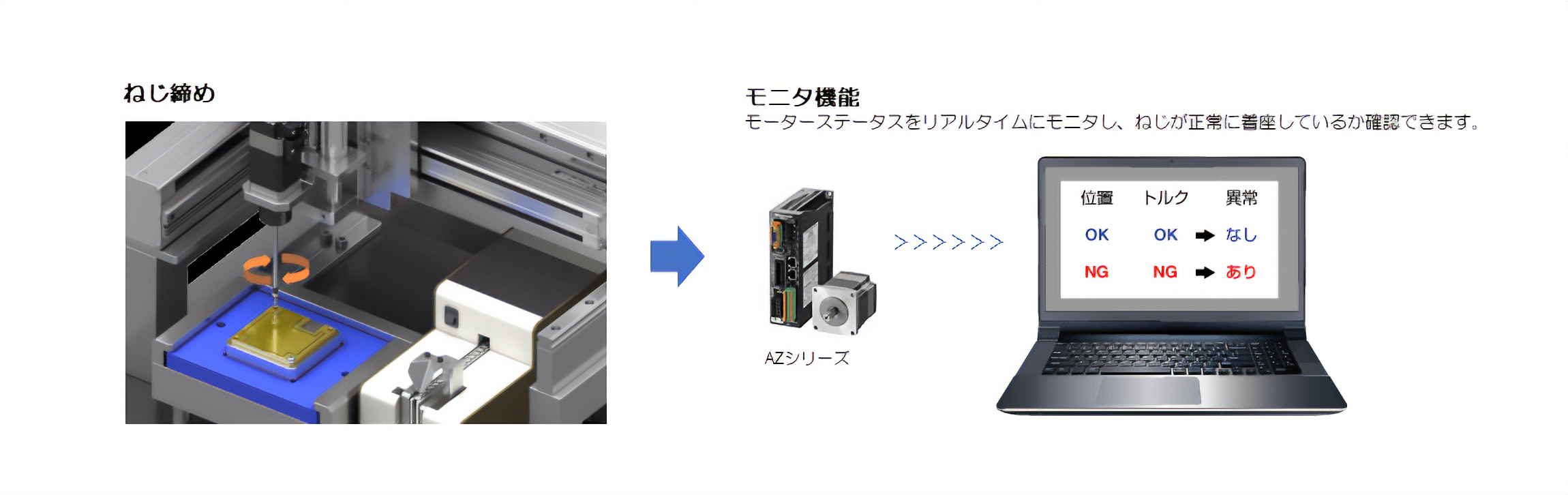
トルク制限値(トルクリミット)を設定できる押し当て運転機能により、締めすぎによる破損を防止します。 設定したトルク制限値に達した時に出力するTLC出力と、モニタ機能から位置や負荷トルクの情報を取り込むことで、締め付けの状態を確認できます。 また、モニタ機能では製品不良となる「ねじのかじり」や「ねじの位置ズレ」など、異常の確認も可能です。
トルクや張力の調整に最適なモーターのご紹介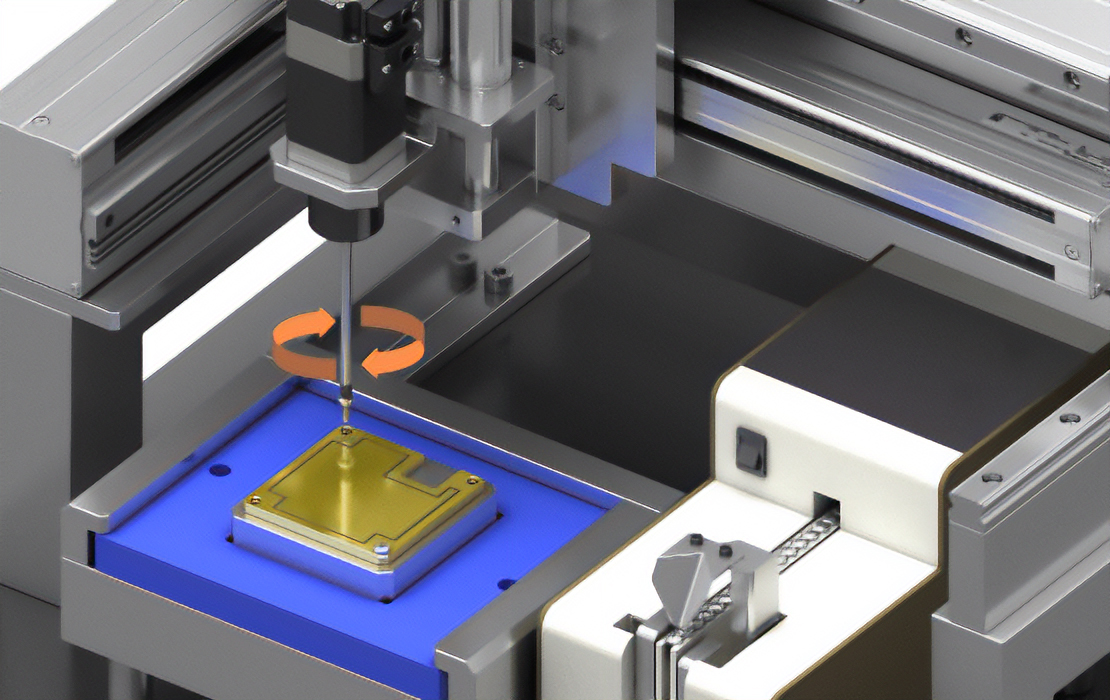
搭載製品

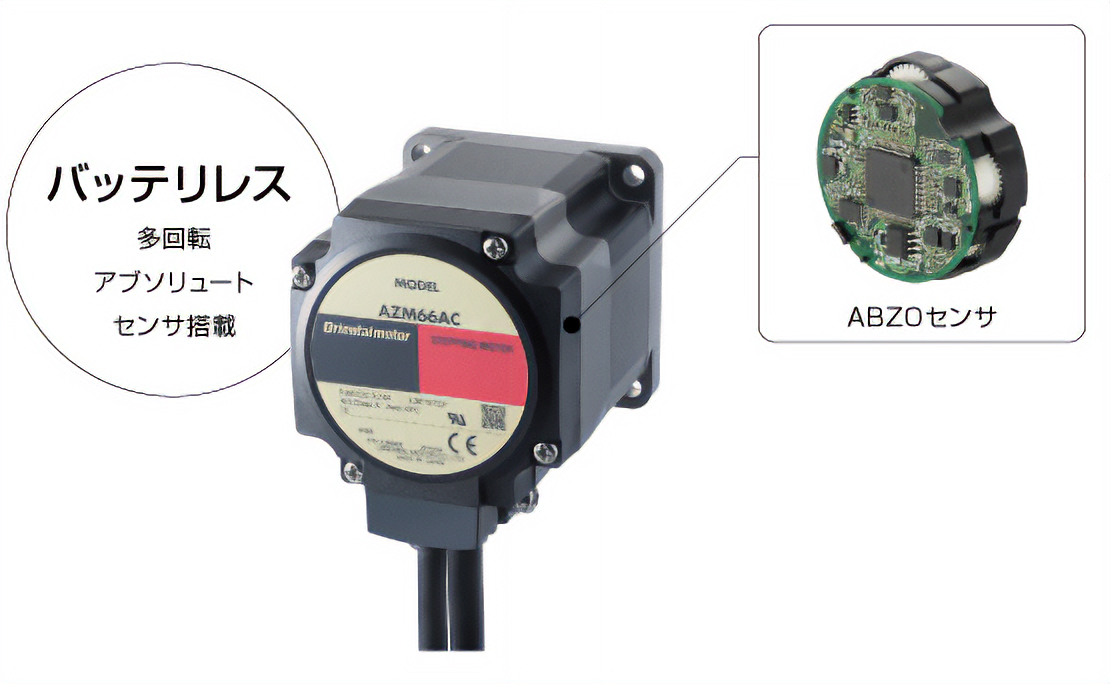
αSTEP バッテリレスアブソリュートセンサ搭載 AZシリーズ
当社独自のクローズドループ制御を採用したαSTEPに、新開発のABZOセンサを搭載。
アブソリュートシステムをバッテリ不要で可能にしました。ネットワーク対応ドライバも取り揃えて、先進の位置決めをお求めやすい価格で実現します。
全軸共通
αSTEP AZシリーズ EtherNet/IP™対応ドライバ
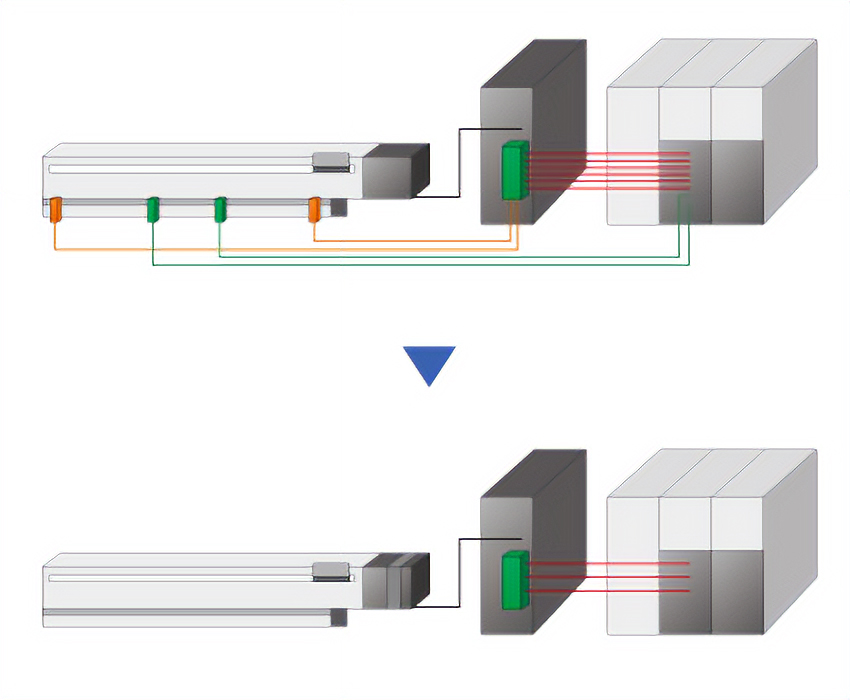
ネットワーク上からモーターを制御
ネットワーク上からの直接制御が可能です。上位制御機器とEtherNet/IP対応ドライバをEtherNet/IP通信ケーブル1本で接続するため、省配線を実現します。
他にも、各種FAネットワークに対応した製品をご用意しています。
- EtherNet/IP™はODVAの商標です。
EDSファイルをご用意
EtherNet/IP対応製品をより簡単にお使いいただけるよう、EDSファイルをご用意しています。EDSファイルは、各製品詳細ページからダウンロードできます。
αSTEP AZシリーズ
製品不良となる装置の状態やねじ締めの異常を検出
AZシリーズはモーターの位置、負荷率などのモニタができます。各項目のモニタ状態が任意の設定値に達したとき、信号を出力します。
モニタ機能により、位置やトルクなどの変化から製品不良となる装置の状態やねじ締めの異常を検出できます。
さらに、使用開始時からの積算回転量などもモニタできるため、これまで経験をたよりにしていたノウハウの見える化や、予知保全にも貢献します。
機械式アブソリュートセンサで外部センサ・バッテリ不要
AZシリーズはバッテリレス機械式アブソリュートセンサ<ABZOセンサ>を搭載。位置決め運転中に非常停止や停電により電源が遮断されても、モーター・ドライバ間のケーブルを外しても、位置情報を保持します。
また、絶対位置情報で原点、ソフトリミットの設定ができるため、外部センサが不要です。
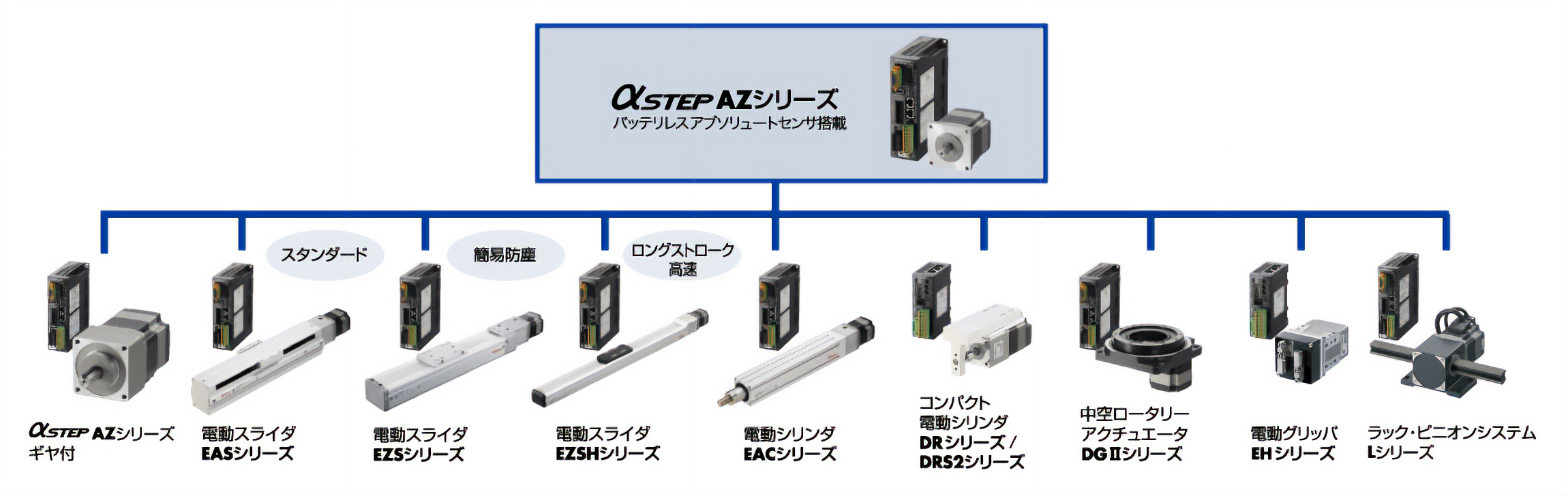
さまざまな動きを統一した制御で実現
αSTEP AZシリーズは、小型から揃う標準タイプモーターのほか、電磁ブレーキ付、ギヤ付などのラインアップをご用意。また、モーターとアクチュエータを組み付けた機構製品も展開しています。それぞれモーター、ドライバ、ケーブルなどが共通なため、配線、制御、保守部品を統一でき、立ち上げの時間や手間を削減できます。
搭載製品

αSTEP AZシリーズEtherNet/IP™対応ドライバ
EtherNet/IPに対応したドライバです。当社のAZシリーズのモーターと、それらを搭載している電動アクチュエータを接続できるため、幅広い用途にお使いいただけます。
αSTEP バッテリレスアブソリュートセンサ搭載 AZシリーズ
当社独自のクローズドループ制御を採用したαSTEPに、新開発のABZOセンサを搭載。
アブソリュートシステムをバッテリ不要で可能にしました。ネットワーク対応ドライバも取り揃えて、先進の位置決めをお求めやすい価格で実現します。
製品選定段階から装置設計をサポート
モーターの選定をサポート
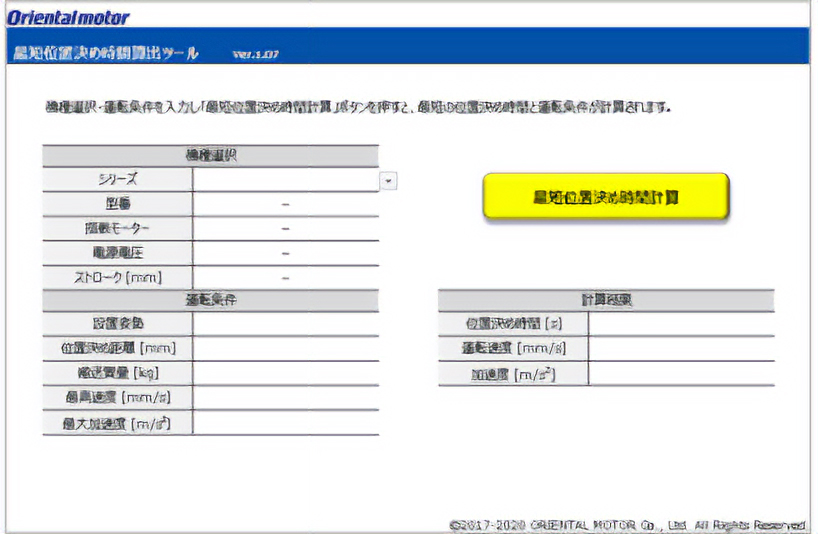
パソコンでモーターの選定がおこなえる「モーター選定ツール」をご用意しています。
また、専任スタッフがお客様に代わってモーターを選定するサービスもご用意しています。詳細はリンク先をご参照ください。
-

< モーター選定ツールイメージ >
当社製品とPLCの立ち上げ資料をご用意
PLCとの接続および簡単な動作までの流れを説明したセットアップマニュアルをご用意しています。立ち上げ時間の短縮にご活用ください。
〈対象メーカー〉
- オムロン株式会社、
- 株式会社キーエンス、
- 株式会社日立産機システム、
- 富士電機株式会社、
- 三菱電機株式会社、
- 株式会社安川電機、
- シーメンス株式会社
サンプルCADデータをご用意
電動アクチュエータの取り付けに使用する周辺プレートのサンプルCADデータを、WEBサイト上でダウンロードできます。装置設計や製品の検討にお役立てください。
トラブルの際はサービスエンジニアがサポート
モーターに関するさまざまな疑問やトラブルに対し、お客様の現場にサービスエンジニアがお伺いし対応します。
またオンラインサポートもおこなっておりますので、お気軽にご利用ください。
関連コンテンツ

ロボットの内製を幅広くサポート
実際に制作した垂直多関節ロボットデモ機を元に製品選定のポイントと、ロボット内製を検討されている方に向けて関連サービスをご紹介します。

多品種パーツ供給装置
さまざまなサイズのパーツを、パーツフィーダのように1つずつ供給する装置です。指定されたパーツをストッカーからラック・ピニオン機構で切り出し、供給口まで搬送します。

ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。


スカラロボット(水平多関節ロボット)
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。

4軸多関節ロボットアーム
AZシリーズを搭載したロボットアームです。平行リンク機構により手首軸を制御することなく先端を水平に保ちます。(オリムベクスタWEBサイトへリンクします。)