ACモーターの場合
(1)駆動機構部の仕様と運転条件
ボールねじを用いたテーブルの上下駆動に電磁ブレーキ付モーターを使用する場合の選定例です。
次の要求仕様を満たすようにモーターの選定をおこないます。
- テーブルとワークの総質量
- m=45[kg]
- テーブルの移動速度
- V=15±2[mm/s]
- 外力
- FA=0[N]
- ボールねじの傾斜角
- θ=90[°]
- ボールねじの全長
- LB=800[mm]
- ボールねじの軸径
- DB=20[mm]
- ボールねじのリード
- PB=5[mm]
- ボールねじ1回転当たりの移動距離
- A=5[mm]
- ボールねじの効率
- η=0.9
- ボールねじの材質
- 鉄(密度 ρ =7.9×103[kg/m3])
- 予圧ナットの内部摩擦係数
- μ0=0.3
- しゅう動面の摩擦係数
- μ =0.05
- モーターの電源
- 単相100V60Hz
- 稼動時間
- 1日5時間間欠運転
起動・停止を繰り返す停止中の負荷保持が必要
(2)ギヤヘッド減速比の決定
\(\begin{align}
\text{ギヤヘッド出力軸の回転速度}\ N_G=\frac{V \cdot 60}{A} &= \frac{(15 \pm 2) \times 60}{5}\\[ 5pt]
&= 180 \pm 24\ [ \mathrm{r/min}]\end{align}\)
電磁ブレーキ付モーター(4極)の60Hzの定格回転速度は1450?1550[r/min]ですから、この範囲内にあるギヤヘッドの減速比を選びます。
\(\begin{align}
\text{ギヤヘッド減速比}\ i=\frac{1450\text{~}1550}{N_G} &= \frac{1450\text{~}1550}{180 \pm 24}
=7.1\text{~}9.9
\end{align}\)
これにより減速比i=9を選びます。
(3)必要トルクTM[N・m]の計算
\(\begin{align}
\text { 運転方向荷重 }F & = F_A+m \cdot g\ (\sin \theta+\mu \cdot \cos \theta)\\[ 5pt ]
& = 0 + 45 \times \ 9.807(\sin 90^{\circ}+\ 0.05 \cos 90^{\circ})\\[ 5pt ]
& = 441\ [\mathrm{N}]\end{align}\)
\(\begin{align}
\text { ボールねじの予圧荷重 }F_0 = \frac{F}{3} = 147\ [\mathrm{N}]\end{align}\)
\(\begin{align}
\text { 負荷トルク } {T'}_L & =\frac{{F} \cdot {P_B}}{2 \pi \cdot \eta} + \frac{ \mu_0 \cdot F_0 \cdot P_B}{2 \pi} \\[ 5pt ]
& =\frac{441 \times 5 \times 10^{-3}}{2 \pi \times 0.9} + \frac{0.3 \times 147 \times 5 \times 10^{-3}}{2 \pi} \\[ 5pt ]
& =0.426\ [\mathrm{N} \cdot \mathrm{m}]
\end{align}\)
安全率Sf=2を考慮します。
\(T_L = {T'}_L \cdot S_f = 0.426 \times 2 = 0.86 \ [\mathrm{N}\cdot \mathrm{m}]\)
ここまでの計算結果(減速比i=9、負荷トルクTL=0.86[N・m])を条件に、ギヤヘッドの許容トルクを満足するギヤヘッドと電磁ブレーキ付モーターを選びます。
このとき、仕様を参照して、モーター:4RK25GN-AW2MJ、ギヤヘッド:4GN9Kを仮選定します。
この負荷トルクを、モーター出力軸の値に換算し、必要トルクTMを求めます。
\(\begin{align}T_M = \frac{T_L}{i \cdot \eta _G} = \frac{0.86}{9 \times 0.81} = 0.118 \ [\mathrm{N}\cdot \mathrm{m}] = 118\ [ \mathrm{m} \mathrm{N}\cdot \mathrm{m}] \end{align}\)
(ギヤヘッド4GN9Kの伝達効率 ηG=0.81)
先に選んだ4RK25GN-AW2MJの起動トルクは140[mN・m]で、必要トルク118[mN・m]を満足しているため、この機構を起動することができます。
さらに、停止中にはたらく重力荷重を電磁ブレーキで保持可能かを確認します。
ここでは、先に求めた負荷トルクと同等の負荷がはたらくものとみなします。
モーター出力軸で負荷保持に必要なトルクT'M
\(\begin{align}{T'}_M = \frac{T_L}{i} = \frac{0.86}{9} = 0.0956 \ [\mathrm{N}\cdot \mathrm{m}] = 95.6 \ [ \mathrm{m} \mathrm{N}\cdot \mathrm{m}] \end{align}\)
先に選んだ4RK25GN-AW2MJの電磁ブレーキ部の静摩擦トルクは 100[mN・m]で、負荷保持に必要なトルク95.6[mN・m]を満足しています。
(4)負荷慣性モーメントJ[kg・m2]の確認
ボールねじの慣性モーメント
\(\begin{align}
{J_B} & = \frac{\pi}{32}\cdot \rho\cdot{L_B}\cdot{{D_B}^4}\\[ 5pt ]
& = \frac{\pi}{32}\times\ 7.9 \times 10^3\ \times 800 \times 10^{-3}\times {\left(20\times 10^{-3} \right)}^4\\[ 5pt ]
& = 0.993 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]
\end{align}\)
テーブルとワークの慣性モーメント
\(\begin{align}
{J_m} & = \mathrm{m}\ \left(\frac{A}{2\pi}\right)^2\\[ 5pt ]
& = 45 \left(\frac{5 \times 10^{-3}}{2\pi}\right)^2\\[ 5pt ]
& = 0.286 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]
\end{align}\)
ギヤヘッド出力軸の負荷慣性モーメントJを求めます。
\(\begin{align}
J &= J_B + J_m = 0.993 + 0.286\\
&= 1.28 \times {10}^{-4}\ [\mathrm{kg} \cdot \mathrm{m^2}]
\end{align}\)
ここで減速比9のギヤヘッド4GN9Kの許容負荷慣性モーメントJGは、次の式になります。
\(\begin{align}
J_G &= 0.31 \times {10}^{-4} \times 9^2\\
&= 25.1 \times {10}^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]
\end{align}\)
そのため、J<JGとなり負荷慣性モーメントが許容値以下で問題ありません。トルクに余裕がありますから、無負荷時の回転速度(約1750r/min)で移動速度の確認をします。
\(\begin{align}
V &= \frac{N_M \cdot P_B}{60 \cdot i} = \frac{1750 \times 5}{60 \times 9} = 16.2\ [\mathrm{mm} / \mathrm{s}] \quad\quad N_M: \text{モーター回転速度}
\end{align}\)
仕様を満足していることが確認できました。
よってモーター:4RK25GN-AW2MJ、ギヤヘッド:4GN9Kを選定します。
αSTEPの場合 / ステッピングモーターの場合
(1)駆動機構部の仕様と運転条件
- テーブルとワークの総質量
- m=40[kg]
- しゅう動面の摩擦係数
- μ =0.05
- ボールねじの効率
- η =0.9
- 予圧ナットの内部摩擦係数
- μ0=0.3
- ボールねじの軸径
- DB=15[mm]
- ボールねじの全長
- LB=600[mm]
- ボールねじの材質
- 鉄(密度ρ =7.9×103[kg/m3])
- ボールねじのリード
- PB=15[mm]
- 要求分解能
(1 パルス当たりの送り量)
- Δl=0.03[mm/step]
- 送り量
- l=180[mm]
- 位置決め時間
- t0=0.8 秒以内
- 傾斜角度
- θ=0[°]
(2)必要分解能θSの計算
\(\begin{align}
\theta_S &= \frac{360^\circ \cdot \Delta l}{P_B}\\[ 5pt ]
&= \frac{360^\circ \times 0.03}{15}= 0.72^\circ
\end{align}\)
αSTEPAZシリーズが使用できます。
分解能の変更・設定が可能です。
出荷時分解能0.36°/パルス→0.72°/パルスに変更します。
①動作パルス数A[パルス]の計算
\(\begin{align}
A &= \frac{l}{P_B} \cdot\frac{360^\circ}{\theta_S}\\[ 5pt ]
&= \frac{180}{15} \times \frac{360^\circ}{0.72^\circ}= 6000\ [\text{パルス}]
\end{align}\)
②加速(減速)時間t1[s]の決定
加速(減速)時間はそれぞれ位置決め時間の25%が適当です。
\(\begin{align}
t_1= 0.8 \times 0.25 = 0.2 \ [\mathrm{s}]
\end{align}\)
③運転パルス速度f2[Hz]の計算
\(\begin{align}
f_2 &= \frac{A - f_1 \cdot t_1}{t_0 - t_1} \\[ 5pt ]
&= \frac{6000 - 0}{0.8 - 0.2} = 10000\ [\text{Hz}]
\end{align}\)
![③運転パルス速度f2[Hz]の計算](/sites/default/files/image/tech/calculation/sizing-motor06/tech-calculation-sizing-motor06_03_ja.gif)
④運転速度NM[r/min]の計算
\(\begin{align}
N_M &= \frac{\theta_S}{360^\circ} f_2 \cdot 60\\[ 5pt ]
&= \frac{0.72^\circ}{360^\circ}\times 10000 \times 60\\[ 5pt ]
&= 1200\ [\text{r/min}]
\end{align}\)
(4)必要トルクTM[N・m]の計算
計算式を参照
①負荷トルクTL[N・m]の計算
\(\begin{align}\text { 運転方向荷重 }F & = F_A+m \cdot g\ (\sin \theta+\mu \cos \theta)\\[ 5pt ]
& = 0 + 40 \times \ 9.807(\sin 0^{\circ}+\ 0.05 \cos 0^{\circ})\\[ 5pt ]
& = 19.6\ [\mathrm{N}]\end{align}\)
\(\begin{align}\text { 予圧荷重 }F_0 = \frac{F}{3} = \frac{19.6}{3}=6.53\ [\mathrm{N}]\end{align}\)
\(\begin{align}\text { 負荷トルク } {T_L} & =\frac{{F} \cdot {P_B}}{2 \pi \cdot \eta} + \frac{ \mu_0 \cdot F_0 \cdot P_B}{2 \pi} \\[ 5pt ]
& =\frac{19.6 \times 15 \times 10^{-3}}{2 \pi \times 0.9} + \frac{0.3 \times 6.53 \times 15 \times 10^{-3}}{2 \pi} \\[ 5pt ]
& =0.0567\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
②加速トルクTa[N・m]の計算
②-1 負荷慣性モーメントJL[kg・m2]の計算(計算式を参照)
ボールねじの慣性モーメント
\(\begin{align} {J_B} & = \frac{\pi}{32}\cdot \rho\cdot{L_B}\cdot{{D_B}^4}\\[ 5pt ]
& = \frac{\pi}{32}\times\ 7.9 \times 10^3\ \times 600 \times 10^{-3}\times {\left(15\times 10^{-3} \right)}^4\\[ 5pt ]
& = 0.236 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]
\end{align}\)
テーブルとワークの慣性モーメント
\(\begin{align}{J_r} & = \mathrm{m}\ \left(\frac{P_B}{2\pi}\right)^2\\[ 5pt ]
& = 40 \left(\frac{15 \times 10^{-3}}{2\pi}\right)^2\\[ 5pt ]
& = 2.28 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]
\end{align}\)
負荷慣性モーメント
\(\begin{align}J_L &=J_B + J_r\\
&= 0.236 \times10^{-4} + 2.28 \times 10^{-4}\\
& = 2.52 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]
\end{align}\)
②-2 加速トルクTa[N・m]の計算
\(\begin{align}T_a & =\frac{(J_0 + J_L)}{9.55} \cdot \frac{N_M}{t_1} \\[ 5pt ]
& =\frac{(J_0 + 2.52 \times 10^{-4})}{9.55} \times \frac{1200}{0.2} \\[ 5pt ]
& =628\ J_0 + 0.158\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
加速トルクをパルス速度で求める場合は以下のようになります。 計算結果は同じです。
\(\begin{align}T_a & =(J_0 + J_L) \cdot \frac{\pi \cdot \theta_S}{180^\circ} \cdot \frac{f_2 - f_1}{t_1} \\[ 5pt ]
& =(J_0 + 2.52 \times 10^{-4})\times \frac{\pi \cdot 0.72^\circ}{180^\circ}\times \frac{10000-0}{0.2} \\[ 5pt ]
& =628\ J_0 + 0.158\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
③必要トルクTM[N・m]の計算
安全率Sf=2とします。
\(\begin{align}T_M & =(T_L + T_a)S_f\\[ 5pt ]
& =\{0.0567 + (628\ J_0 + 0.158) \} \times 2\\[ 5pt ]
& =1256\ J_0 + 0.429\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
(5)モーターの選定
①モーター仮選定
| 品名 |
ローター慣性 モーメント[kg・m2] |
必要トルク [N・m] |
| AZM66AC |
370x10-7 |
0.48 |
②回転速度―トルク特性よりモーターの決定
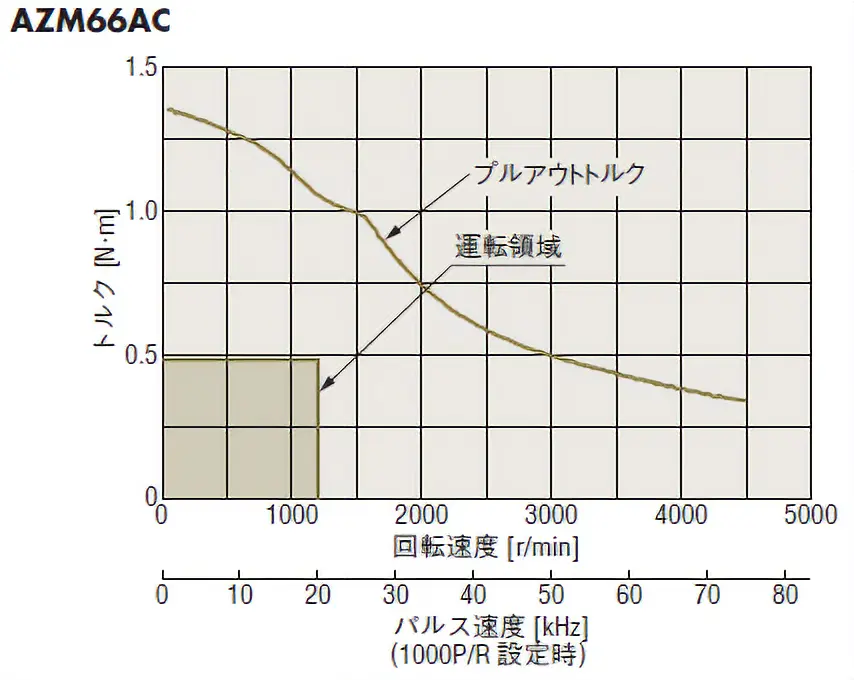
運転速度と必要トルクで表される運転領域が回転速度―トルク特性のプルアウトトルクの内側に入っているので、使用可能です。
(6)イナーシャ比の確認
計算式、参考値を参照
\(\begin{align}\frac{J_L}{J_0} =\frac{2.52 \times 10^{-4}}{370 \times 10^{-7}}\fallingdotseq 6.8\end{align}\)
AZM66ACのイナーシャ比は30以下のため、6.8 であれば運転可能と判断できます。
サーボモーターの場合
(1)駆動機構部の仕様と運転条件
下図のように1軸のテーブルを駆動するためのサーボモーターの選定をおこないます。
- テーブルの最高速度
- VL=0.2[m/s]
- 分解能
- Δl=0.02[mm]
- モーターの電源
- 単相100V
- テーブルとワークの総質量
- m=100[kg]
- 外力
- FA=29.4[N]
- しゅう動面の摩擦係数
- μ=0.04
- ボールねじの効率
- η=0.9
- 予圧ナットの内部摩擦係数
- μ0=0.3
- ボールねじの軸径
- DB=25[mm]
- ボールねじの全長
- LB=1000[mm]
- ボールねじのリード
- PB=10[mm]
- ボールねじの材質
- 鉄(密度 ρ =7.9×103[kg/m3])
- 運転サイクル
- 2.1 秒運転 0.4 秒停止(この繰り返し)
- 加減速時間
- t1=t3=0.1[s]
(2)必要分解能θの計算
テーブル駆動に必要な分解能からモーターの分解能を計算します。
\(\begin{align}\theta =\frac{360^\circ \cdot \Delta l}{P_B}= \frac{360^\circ \times 0.02}{10}=0.72^\circ\end{align}\)
NXシリーズの分解能θM=0.36°/パルスはこれを満足しています。
(3)運転パターンの作成
次式よりモーター回転速度NMを求めます。
\(\begin{align}N_M =\frac{60 \cdot V_L}{P_B}= \frac{60 \times 0.2}{10 \times 10^{-3}}=1200\ [\mathrm{r/min}]\end{align}\)
このNMと運転サイクル、加減速時間から速度パターンをつくります。
(4)負荷トルクTL[N・m]の計算
運転方向荷重
\(\begin{align}F & = F_A+m \cdot g\ (\sin \theta+\mu \cdot \cos \theta)\\[ 5pt ]
& = 29.4 + 100 \times \ 9.807 \ (\sin 0^{\circ}+\ 0.04 \cos 0^{\circ})\\[ 5pt ]
& = 68.6\ [\mathrm{N}]\end{align}\)
モーター軸換算の負荷トルク
\(\begin{align}{T_L} & =\frac{{F} \cdot {P_B}}{2 \pi \cdot \eta} + \frac{ \mu_0 \cdot F_0 \cdot P_B}{2 \pi} \\[ 5pt ]
& =\frac{68.6 \times 10 \times 10^{-3}}{2 \pi \times 0.9} + \frac{0.3 \times 22.9 \times 10 \times 10^{-3}}{2 \pi} \\[ 5pt ]
& \fallingdotseq0.13\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
ここでボールねじの予圧荷重は\(\displaystyle F_0 = \frac{1}{3} \ F \ \)としています。
(5)負荷慣性モーメントJL[kg・m2]の計算
ボールねじの慣性モーメント
\(\begin{align} {J_B} & = \frac{\pi}{32}\cdot \rho\cdot{L_B}\cdot{{D_B}^4}\\[ 5pt ]
& = \frac{\pi}{32}\times\ 7.9 \times 10^3\ \times 1000 \times 10^{-3}\times {\left(25\times 10^{-3} \right)}^4\\[ 5pt ]
& \fallingdotseq 3.03 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]\end{align}\)
テーブルとワークの慣性モーメント
\(\begin{align}{J_m} & = \mathrm{m}\ \left(\frac{P_B}{2\pi}\right)^2\\[ 5pt ]
& = 100 \times \left(\frac{10 \times 10^{-3}}{2\pi}\right)^2\\[ 5pt ]
& \fallingdotseq 2.53 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]\end{align}\)
負荷慣性モーメント
\(\begin{align}J_L &=J_B + J_m\\ &= 3.03 \times10^{-4} + 2.53 \times 10^{-4}\\
& = 5.56 \times 10^{-4} \ [\mathrm{kg}\cdot\mathrm{m^2}]\end{align}\)
(6)サーボモーターの仮選定
安全率Sf=1.5とします。
\(\begin{align}\text{負荷トルク}\ {T'}_L
&=Sf \cdot T_L\\[ 5pt ]
&=1.5 \times 0.13\\[ 5pt ]
&= 0.195 [\mathrm{N}\cdot \mathrm{m}]
\end{align}\)
\(\begin{align}\text{負荷慣性モーメント}\ J_L
=5.56 \times 10^{-4} \ [\mathrm{kg}\cdot \mathrm{m}^2]
\end{align}\)
これより回転速度が 1200[r/min]で、定格トルクを 0.195[N・m]以上出力し、許容負荷慣性モーメント5.56×10?4[kg・m2]以上のサーボモーターを選びます。
→ NXM620A+NXD20-A
定格回転速度N = 3000[r/min]
定格トルクTM=0.637[N・m]
ローター慣性モーメントJ0 = 0.162 × 10?4[kg・m2]
許容負荷慣性モーメントJ = 8.1 × 10?4[kg・m2]
瞬時最大トルクTMAX = 1.91[N・m]
が適当です。
(7)加速トルクTa[N・m]、減速トルクTd[N・m]の計算
次式より加減速トルクを求めます。
\(\begin{align}T_a (= T_d) & = \frac{(J_L + J_0) \ N_M }{9.55 \ t_1} \\[ 5pt ]
& =\frac{(5.56 \times 10^{-4} + 0.162 \times 10^{-4})\times 1200}{9.55 \times 0.1} \\[ 5pt ]
& \fallingdotseq \ 0.72\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
(8)必要トルクT[N・m]の計算
\(\begin{align}T& = T_a + T_L \\[ 5pt ]
& = 0.72 + 0.13\\[ 5pt]
&= 0.85 \ [\mathrm{N}\cdot \mathrm{m}]
\end{align}\)
この必要トルクはNXM620A+NXD20-Aの瞬時最大トルク 1.91[N・m]以下のためNXM620A+NXD20-Aで使用可能です。
(9)トルクパターンの作成
運転サイクル、加減速トルク、負荷トルク、加速時間を用い、トルクパターンを作成します。
(10)実効負荷トルクTrms[N・m]の計算
トルクパターンと次式を利用して実効負荷トルクTrmsを求めます。
\(\begin{align} T_{rms}& = \root \of {\frac{(T_a + T_L)^2 \cdot t_1 + {T_L}^2 \cdot t_2 + (T_d - T_L)^2 \cdot t_3}{t_f}} \\[ 5pt ]
& = \root \of {\frac{(0.72 + 0.13)^2 \times 0.1 + {0.13}^2 \times 1.9 + (0.72 - 0.13 )^2 \times 0.1}{2.5} } \\[ 5pt ]
& \fallingdotseq 0.24 \ [ \mathrm{N} \cdot \mathrm{m}]
\end{align}\)
ここで、運転サイクルからt1+t2+t3=2.1[s]、加速時間・減速時間 t1=t3=0.1、これよりt2=2.1?0.1×2=1.9[s]
このTrmsとサーボモーターの定格トルクTMとの比(実効負荷安全率)は、次の式になります。
\(\begin{align} \frac{T_M}{T_{rms}}& = \frac{0.637}{0.24} \\[ 5pt ]
& = 2.65
\end{align}\)
この実効負荷安全率は一般に1.5~2以上であれば運転が可能です。