ACモーターの場合
(1)駆動機構部の仕様と運転条件
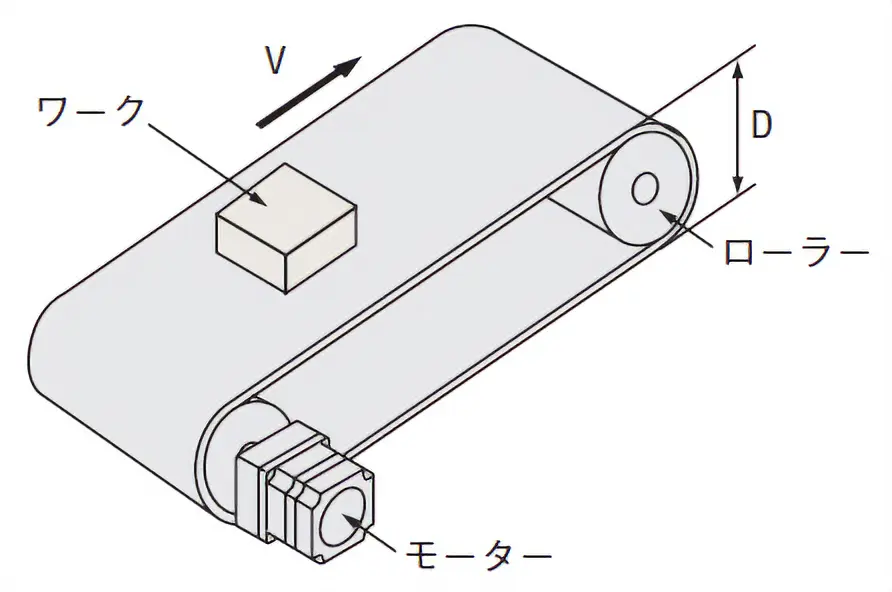
ベルトコンベアの駆動にインダクションモーターを使用する場合の選定例です。
次の要求仕様を満たすようにモーターの選定をおこないます。
- ベルトとワークの総質量
-
m1 = 25[kg]
- 外力
-
F A
= 0[N]
- しゅう動面の摩擦係数
-
μ = 0.3
- ローラーの直径
-
D = 90[mm]
- ローラーの質量
-
m2 = 1[kg]
- ベルトとローラーの効率
-
η = 0.9
- ベルトのスピード
-
V = 180[mm/s]±10%
- モーターの電源
- 単相100V50Hz
- 稼動時間
- 1日8時間運転
(2)ギヤヘッド減速比の決定
\(\begin{align}
\text{ギヤヘッド出力軸の回転速度}\ N_G
&=\frac{V \cdot 60}{\pi \cdot D} \\[5pt]
&= \frac{(180 \pm 18) \times 60}{\pi \times 90}\\[ 5pt]
&= 38.2 \pm 3.8\ [ \mathrm{r/min}]\end{align}\)
インダクションモーター(4極)の50Hzの定格回転速度は1200~1300[r/min]ですから、この範囲内にあるギヤヘッドの減速比を選びます。
\(\begin{align}
\text{ギヤヘッド減速比}\ i &=\frac{1200\text{~}1300}{N_G} \\[5pt]
&= \frac{1200\text{~}1300}{38.2 \pm 3.8}\\[5pt] &= \ 28.6\text{~}37.8
\end{align}\)
これにより減速比i=36を選びます。
(3)必要トルクTM[N·m]の計算
\(\begin{align}\text{しゅう動面の摩擦力}F & = F_A+m \cdot g\ (\sin \theta+\mu \cdot \cos \theta)\\[ 5pt ]
& = 0 + 25 \times \ 9.807 \ (\sin 0^{\circ}+\ 0.3 \cos 0^{\circ})\\[ 5pt ]
& = 73.6\ [\mathrm{N}]\end{align}\)
\(\begin{align} \text{負荷トルク}{T'}_L & =\frac{{F} \cdot {D}}{2 \cdot \eta} \\[ 5pt ]
& =\frac{73.6 \times 90 \times 10^{-3}}{2 \times 0.9} \\[ 5pt ]
& = 3.68\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
安全率Sf=2を考慮します。
\(\begin{align} T_L = {T'}_L \cdot Sf = 3.68 \times 2 = 7.36 \ [\mathrm{N}\cdot \mathrm{m}]\end{align}\)
ここまでの計算結果(減速比i=36、負荷トルクTL=7.36[N·m])を条件に、ギヤヘッドの許容トルクを満足する
ギヤヘッドとインダクションモーターを選びます。
このとき、仕様を参照して、モーター:5IK40GN-AW2J、ギヤヘッド:5GN36Kを仮選定します。
この負荷トルクをモーター出力軸の値に換算し、必要トルクTMを求めます。
\(\begin{align} T_M &= \frac{T_L}{i \cdot \eta_G}\\[5pt]
&= \frac{7.36}{36 \times 0.73}\\[5pt]
&= 0.280 \ [\mathrm{N}\cdot \mathrm{m}]\\[5pt]
&= 280 \ [\mathrm{mN}\cdot \mathrm{m}] \end{align}\)
(ギヤヘッド5GN36Kの伝達効率 ηG=0.73)
先に選んだ5IK40GN-AW2Jの起動トルクは200[mN·m]で、必要トルクを満足できません。
そこで、モーターを1サイズ上の5IK60GE-AW2Jに、ギヤヘッドを5GE36Sに変更します。この場合は、次の式になります。
\(\begin{align} T_M &= \frac{T_L}{i \cdot \eta_G}\\[5pt]
&= \frac{7.36}{36 \times 0.66}\\[5pt]
&= 0.31 \ [\mathrm{N}\cdot \mathrm{m}]\\[5pt]
&= 310 \ [\mathrm{mN}\cdot \mathrm{m}] \end{align}\)
(ギヤヘッド5GE36Sの伝達効率 ηG=0.66)
5IK60GE-AW2Jの起動トルクは320[mN·m]で、必要トルク310[mN·m]を満足します。
(4)負荷慣性モーメントJ[kg·m2]の確認
ベルトとワークの慣性モーメント
\(\begin{align} {J_m}_1 & = m_1 \left( \frac{{\pi} \cdot {D}}{2 \pi} \right)^2 \\[ 5pt ]
& = 25 \times \left( \frac{\pi \times 90 \times 10^{-3}}{2 \pi} \right)^2 \\[ 5pt ]
& = 507 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
ローラーの慣性モーメント
\(\begin{align} {J_m}_2 & = \frac{1}{8} \cdot m_2 \cdot D^2 \\[ 5pt ]
& = \frac{1}{8} \times 1 \times \left(90 \times 10^{-3} \right)^2 \\[ 5pt ]
& = 10.2 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
ギヤヘッド出力軸の負荷慣性モーメントJを求めます。
ローラー(Jm2)は2個あることを考慮します。
\(\begin{align} J & = {J_m}_1 + 2 {J_m}_2 \\[ 5pt ]
& = 507 \times 10^{-4} + 10.2\times 10^{-4} \times 2 \\[ 5pt ]
& = 528 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
ここで減速比36のギヤヘッド5GE36Sの許容負荷慣性モーメントJGは、次の式になります。
\(\begin{align} J_G & = 1.1 \times 10^{-4} \times 36^2 \\[ 5pt ]
& = 1425 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
そのため、J<JGとなり負荷慣性モーメントが許容値以下で問題ありません。選定したモーターの定格トルクは490[mN·m]ですから、実際の負荷トルクよりも大きく、モーターは定格回転速度よりも高い回転速度で運転されることになります。
そこで、無負荷時の回転速度(約1470r/min)から、ベルトスピードを計算して、選定した製品が仕様を満足しているかどうか確認します。
\(\begin{align}V &= \frac{N_M \cdot \pi \cdot D}{60 \cdot i}\\[5pt] &= \frac{1470 \times \pi \times 90}{60 \times 36}\\[5pt] &= 192\ [\mathrm{mm} / \mathrm{s}] \quad\quad N_M: \text{モーター回転速度}\end{align}\)
仕様を満足していることが確認できました。
よってモーター:5IK60GE-AW2J、ギヤヘッド:5GE36Sを選定します。
超低速シンクロナスモーターSMKシリーズの場合
(1)駆動機構部の仕様と運転条件
図1のベルト駆動のテーブルを図2のような運転パターンで駆動させた場合のSMK237A-Aでの駆動可能なワーク質量の選定をおこないます。
- ベルトとワークの総質量
-
m1 = 1[kg]
- ローラーの直径
-
D = 30[mm]
- ローラーの質量
-
m2 = 0.1[kg]
- しゅう動面の摩擦係数
-
μ = 0.04
- ベルトとプーリの効率
-
η = 0.9
- 電源周波数
- 50Hz(回転速度60r/min)
超低速シンクロナスモーターは、2相ステッピングモーターと基本原理が同じであるため、2相ステッピングモーターと同様の考え方でトルク計算をおこないます。
(4)負荷慣性モーメントJL[kg·m2]の計算
ベルトとワークの慣性モーメント
\(\begin{align} {J_m}_1 & = m_1 \left( \frac{{\pi} \cdot {D}}{2 \pi} \right)^2 \\[ 5pt ]
& = 1 \times \left( \frac{\pi \times 30 \times 10^{-3}}{2 \pi} \right)^2 \\[ 5pt ]
& = 2.25 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
ローラーの慣性モーメント
\(\begin{align} {J_m}_2 & = \frac{1}{8} m_2 \cdot D^2 \\[ 5pt ]
& = \frac{1}{8} \times 0.1 \times \left(30 \times 10^{-3} \right)^2 \\[ 5pt ]
& = 0.113 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
負荷慣性モーメントJLを求めます。
ローラー(Jm2)は2個あることを考慮します。
\(\begin{align} J_L & = {J_m}_1 + 2 {J_m}_2 \\[ 5pt ]
& = 2.25 \times 10^{-4} + 0.113 \times 10^{-4} \times 2 \\[ 5pt ]
& = 2.48 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
(7)モーターの選定
必要運転トルクと許容負荷慣性モーメントの両方を満足するモーターを選定します。
| 品名 |
ローター慣性
モーメント[kg·m2] |
許容負荷慣性
モーメント[kg·m2] |
出力トルク
[N·m] |
|
SMK237A-A
|
0.3x10-4
|
2.5x10-4
|
0.37 |
ローター慣性モーメントを代入して必要トルクを求めると、TM=0.362[N·m]となり、出力トルク以下であることがわかります。次に、許容負荷慣性モーメントを確認します。(4)で求めた負荷慣性モーメントも許容負荷慣性モーメント以下ですから、SMK237A-Aは使用可能です。
ブラシレスモーターの場合
(1)駆動機構部の仕様と運転条件
下図のようにベルトコンベアを駆動するためのブラシレスモーターの選定をおこないます。
- ベルトのスピード
-
VL
= 0.05~1[m/s]
- モーターの電源
- 単相100V
ベルトコンベア駆動
- ローラーの直径
-
D = 0.1[m]
- ローラーの質量
-
m2 = 1[kg]
- ベルトとワークの総質量
-
m1 = 7[kg]
- 外力
-
FA
= 0[N]
- しゅう動面の摩擦係数
-
μ = 0.3
- ベルトとローラーの効率
-
η = 0.9
(2)使用する回転速度範囲を求める
\(\begin{align}N_G = \frac{60 \cdot V_L}{\pi \cdot D} \quad\quad N_G:\text{ギヤ軸回転速度}
\end{align}\)
ベルトスピードからローラーの回転速度を求めます。
\(\begin{align} &0.05[\mathrm{m} / \mathrm{s} ] \cdots \ \frac{60 \times 0.05}{\pi \times 0.1} = 9.55 [\mathrm{r} / \mathrm{min} ] \left(\text{最低回転速度} \right)\\[5pt]
& 1 [\mathrm{m} / \mathrm{s} ] \cdots\cdots \frac{60 \times 1}{\pi \times 0.1} = 191 [\mathrm{r} / \mathrm{min} ] \left(\text{最高回転速度} \right)
\end{align}\)
ギヤヘッド減速比は仕様表より最低回転速度および最高回転速度が速度範囲内となるよう速度範囲5.4~266の「15」を選びます。
(3)負荷慣性モーメントJG[kg·m2]の計算
ベルトとワークの慣性モーメント
\(\begin{align} {J_m}_1 & = m_1 \left( \frac{{\pi} \cdot {D}}{2 \pi} \right)^2 \\[ 5pt ]
& = 7 \times \left( \frac{\pi \times 0.1}{2 \pi} \right)^2 \\[ 5pt ]
& = 175 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
ローラーの慣性モーメント
\(\begin{align} {J_m}_2 & = \frac{1}{8} \cdot m_2 \cdot D^2 \\[ 5pt ]
& = \frac{1}{8} \times 1 \times 0.1^2 \\[ 5pt ]
& = 12.5 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
負荷慣性モーメントJGを求めます。
ローラー(Jm2)は2個あることを考慮します。
\(\begin{align} J_G & = {J_m}_1 + 2 {J_m}_2 \\[ 5pt ]
& = 175 \times 10^{-4} + 12.5 \times 10^{-4} \times 2 \\[ 5pt ]
& = 200 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
仕様表より出力120W、減速比15の許容負荷慣性モーメントは225×10−4[kg·m2]です。
(4)負荷トルクTL[N·m]の計算
\(\begin{align}\text{しゅう動面の摩擦力}F & = F_A + m \cdot g\ (\sin \theta+\mu \cdot \cos \theta)\\[ 5pt ]
& = 0 + 7 \times \ 9.807 \ (\sin 0^{\circ}+\ 0.3 \times \cos 0^{\circ})\\[ 5pt ]
& = 20.6 \ [\mathrm{N}]\end{align}\)
\(\begin{align} \text{負荷トルク}T_L & =\frac{{F} \cdot {D}}{2 \cdot \eta} \\[ 5pt ]
& =\frac{20.6 \times 0.1}{2 \times 0.9} \\[ 5pt ]
& = 1.15\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
仕様表より出力120W、減速比15のブラシレスモーターを選びます。
許容トルクは5.2[N·m]なので安全率はTM/TL=5.2/1.15≒4.5となります。
この安全率は一般に1.5~2以上であれば運転が可能です。